
鸭式布局双旋稳定弹强迫运动理论研究
2016-10-14 08:35常思江王中原刘铁铮
兵工学报 2016年5期
常思江,王中原,刘铁铮
(1.南京理工大学能源与动力工程学院,江苏南京210094;2.中国兵器科学研究院军贸装备发展部,北京100089)
鸭式布局双旋稳定弹强迫运动理论研究
常思江1,王中原1,刘铁铮2
(1.南京理工大学能源与动力工程学院,江苏南京210094;2.中国兵器科学研究院军贸装备发展部,北京100089)
为深入理解鸭式布局双旋稳定弹的动力学特性,对前体鸭舵周期性干扰引起的强迫运动进行了理论研究。建立一个简化七自由度飞行动力学模型,利用双旋稳定弹的横向运动方程组,在小攻角条件下推导出线性攻角运动模型,得到周期性舵控作用强迫项对应特解的具体表达式。通过对攻角快、慢圆运动角频率及强迫振幅变化特性在不同条件下的仿真分析,讨论该强迫运动的共振条件,分析舵面偏转角、舵面位置和极转动惯量比对共振幅值的影响。对大攻角条件下的前体转速闭锁问题进行初步分析,导出了该弹发生转速闭锁的稳定方位角及临界攻角表达式。
兵器科学与技术;双旋弹;鸭舵;转速特性;攻角;共振;转速闭锁
0 引言
随着低间接伤害概率和高精度打击逐渐成为现代战争对弹箭的基本要求,常规弹箭制导化改造成为一种趋势。常规弹箭按飞行稳定方式通常分为尾翼稳定和旋转稳定,前者依靠稳定力矩保持稳定飞行,后者则依靠高速自旋产生的陀螺效应保持稳定飞行。目前以尾翼稳定弹为平台的制导弹箭发展较快[1-2],而旋转稳定弹因其高转速给姿态探测、执行机构动作等造成较大困难而发展相对滞后,目前工程应用较成熟的主要是几类可简易控制但无精确制导能力的弹道修正弹[3-4]。为发展具有精确打击能力的旋转稳定弹,一种具有前、后两体差动自旋结构的双旋稳定弹应运而生。该类弹的后体保持高旋以维持陀螺稳定,而前体通过一定方式低速旋转,姿态探测与控制机构动作均在前体上完成,从原理上消除了弹体高速旋转对探测、控制的不利影响。
早在20世纪70年代,文献[5-6]就提出了双旋弹的概念并从工程角度对其气动力和弹道设计进行了初步研究。20世纪末,文献[7-8]对双旋稳定弹的动力学特性开展深入研究,建立了飞行动力学模型,并基于线性弹道理论讨论了无控章动特性和脉冲作用下的质心运动特性。Grignon等[9]初步研究了该类弹转动惯量与陀螺稳定储备量的关系。Gagnon等[10]为155毫米双旋弹设计了弹道修正引信,讨论了适配的制导控制算法。德、法圣路易斯研究所(ISL)自2008年以来连续发表论文讨论155 mm双旋弹的相关问题,主要涉及风洞实验与开环弹道仿真[11]、动力学建模方法[12]、线性稳定性分析[13]、弹体操纵性分析[14]及控制系统设计[15]等。国内近年来也相继开展了气动数值模拟[16]、风洞实验研究[17-18]、动力学建模与仿真[19]、转速特性研究[20]、执行机构工况分析[21]、飞行稳定性分析[22]等方面的工作,取得了较多成果。
本文拟在上述研究基础上,进一步就该类弹的特殊结构所引起的弹道特性——强迫运动特性开展研究。经典外弹道学[23]已对弹丸在动不平衡、气动偏心、外形不对称等传统周期性干扰因素作用下的强迫运动进行了详细研究。对于鸭式布局双旋稳定弹,前体低速滚转,鸭舵产生的力和力矩在某种条件下可能成为全弹角运动系统的强迫干扰,有可能对飞行稳定性造成影响,有必要开展相关研究。本文以图1所示鸭式布局双旋弹为对象,前体具有两对舵面,一对为偏转舵面采用继电式舵机操控,在控制过程中,前体低速旋转,通过脉冲调宽和脉冲调相产生确定大小和方向的平均控制力和力矩。另一对为差动安装的固定偏角舵面,用于前体快速减旋并产生导转力矩,以形成一定的平衡转速。根据实际控制的需要,一对偏转舵面可在停止摆动后位于极限位置并随前体滚转。

图1 某鸭式布局双旋弹的外形示意图Fig.1 Schematic diagram of a dua1-spin-stabi1ized projecti1e with canards
要研究该弹丸的强迫运动,必须将转速特性与攻角运动特性相结合。因此,本文主要思路如下:1)建立一个简化7自由度飞行动力学模型;2)推导鸭式布局双旋稳定弹的攻角运动模型及强迫项特解;3)转速特性及强迫运动仿真分析;4)讨论前体在特殊气动力作用下的转速闭锁问题。
1 简化飞行动力学模型
1.1简化七自由度弹道方程
双旋稳定弹飞行动力学建模所用坐标系除外弹道学[23]中的非滚转坐标系 Oξηζ和弹体坐标系OX1Y1Z1外,还包括前体坐标系OX1Y1FZ1F[20]。限于篇幅,这些坐标系的具体定义可参见所列文献。
为便于分析问题,考虑前、后弹体差动旋转,简化假设:1)前、后两体的惯性主轴与全弹惯性主轴平行;2)不考虑差动旋转时产生的各类气动耦合;3)忽略两体之间的约束力,仅计及滚转约束力矩;4)忽略前体所受控制力矩,则作用于后体的控制力矩近似为全弹所受到的控制力矩。
根据牛顿运动定律,在非滚转坐标系中建立质心运动方程,可得

式中:u、v、w为弹丸速度在非滚转坐标系中的分量;Fξ、Fη、Fζ为作用于弹体的合外力在非滚转坐标系中的分量;FCξ、FCη、FCζ为鸭舵控制力在非滚转坐标系中的分量(无控飞行时取为0);gξ、gη、gζ为重力加速度在非滚转坐标系中的分量;q、r为弹丸角速度在非滚转坐标系中的横向分量;m为弹丸质量;t表示时间。
根据动量矩定理,在非滚转坐标系中建立绕质心运动方程,可得

式中:pF、pA分别表示前、后体绕弹体纵轴的转速;MFξ、MFη、MFζ为作用在前体上的合外力矩在非滚转坐标系中的分量;MAξ、MAη、MAζ为作用在后体上的合外力矩在非滚转坐标系中的分量;MCξ、MCη、MCζ为鸭舵控制力矩在非滚转坐标系中的分量(无控飞行时取为0);Mδξ为前体差动舵面产生的导转力矩;MV为前、后体之间的滚转约束力矩;CF、CA分别为前、后体的极转动惯量;AF、AA分别为前、后体的赤道转动惯量;mF、mA分别为前、后体质量;rF、rA分别为前、后体质心至全弹质心的距离。
1.2滚转约束力矩
滚转约束力矩MV主要是两体之间连接轴承产生的黏性阻尼力矩和滚动摩擦力矩,该力矩阻碍后体滚转,可采用以下简化公式计算:

式中:cV为折算了滚动摩擦影响的阻尼系数。
由(4)式可知,为保持稳定飞行并实现弹道控制,pA≫pF,若阻尼系数 cV为正数,则全弹道上MV>0.根据前、后体转速方程,对于后体,MV使pA减小,为一阻尼力矩;对于前体,MV使pF增大,具有导转力矩的性质。
1.3前体导转力矩
前体装有差动舵面的目的是为调节其转速于一个合理的低速范围内,以利于弹道控制。差动舵面可在前体上形成导转力矩,为

式中:Q=0.5ρS,ρ为大气密度,S为弹丸特征面积;V为弹丸总速度;l为弹丸特征长度;m′δF为差动舵面的导转力矩系数导数;εδ为差动角。
根据前体转速方程,角度εδ之正负可控制导转力矩矢量的方向。若εδ>0,则Mδξ对前体的导转方向与后体滚转方向相同;若εδ<0,则Mδξ对前体的导转方向与后体滚转方向相反。
1.4鸭舵控制力和控制力矩
在前体坐标系OX1Y1FZ1F中建立一对偏转舵面的力学模型,将其转换到非滚转坐标系中,得

式中:δCξ、δCη、δCζ为实际舵偏角在非滚转坐标系中的分量;δCY1F、δCZ1F分别为前体的实际俯仰舵偏角和偏航舵偏角;γF为前体滚转角,随着弹丸飞行在0~2π范围内变化。
在非滚转坐标系中,鸭舵控制力可表达为

相应地,鸭舵控制力矩可表示为
式中:lPG为舵控力臂,由全弹质心位置与舵面压心位置所确定。
1.5鸭舵引起的周期性强迫干扰
由(6)式~(8)式可知,鸭舵控制力和控制力矩是前体滚转角γF的函数,则考虑如下情形:在飞行控制过程中,前体随着弹丸飞行滚转,当所需弹道修正量变为0,即弹丸不再需要受控飞行而从有控转为无控时,一对偏转舵面停止继电式摆动后停留在极限位置并随前体滚转,所产生的瞬时气动控制力也随前体相对于非滚转坐标系滚转。从弹道控制角度看,其平均控制效果在前体滚转一周内等效于无控,但从全弹攻角运动系统的角度看,这一旋转的控制矢量在弹道上形成了周期性干扰。从控制方案设计角度讲,在低旋前体上保持固定舵偏是双旋稳定弹无控飞行的一种简易方式,有些采用固定舵/翼的双旋弹[17-18,21],弹道修正引信(即前体)在自由旋转状态(无控飞行)下也呈这种状态。在舵回路出现故障条件下,一对偏转舵面停止继电式摆动后也会停留在极限位置。因此,这一情形在实际工程中是可能出现的,而该周期性干扰所引起的强迫运动正是本文所要深入研究的。
2 攻角运动模型及强迫特解
2.1攻角运动方程
为建立较为精确的鸭式布局双旋稳定弹攻角运动模型,选取广义复攻角ξ作为描述弹轴与速度轴相对运动的独立变量,其定义为

将(1)式中第2、第3个方程和(2)式中第3、第4个方程联立,可得双旋弹横向弹道方程组:

将(10)式中对时间t的导数化为对弹道弧长s的导数,可得

式中:“′”表示变量关于弹道弧长s的1阶导数。
将(11)式中第2个方程乘以单位虚数i与第1个方程相加,将第4个方程乘以单位虚数 i与第3个方程相加,可得

对广义复攻角定义(9)式等号两边关于弹道弧长s求导,可得到

令μ=(q+ir)/V,η=u/V,与(13)式一并代入方程组(12)式中的第1个方程,可得

(14)式中将控制力和其他空气动力合力分开表达。
根据参数μ的定义,有

将(15)式代入方程组(12)式中的第2个方程,得
从(14)式中可以把μ解出来,并关于弹道弧长s求一阶导数后可得μ′,再将μ和μ′一并代入(16)式,并写出阻力、升力、翻转力矩、赤道阻尼力矩以及马格努斯力矩的具体表达式,经推导、整理可得到关于广义复攻角ξ的二阶微分方程为
式中:“"”表示变量关于弹道弧长s的2阶导数。
(17)式其余各参数的表达式为

式中:cx为全弹阻力系数;c′y为全弹升力系数导数;m′z为全弹翻转力矩系数导数;d为弹径;m′zz为全弹赤道阻尼力矩系数导数;m"y为全弹马格努斯力矩系数的二阶导数;g为重力加速度;θ为弹道倾角;ωF表示周期强迫干扰的频率,即前体自转频率。
上述推导过程中已将气动力系数之间的乘积、gsin θ/V2与气动系数的乘积等小量略去。
2.2攻角运动方程的简化
在小攻角条件下,以下关系式近似成立:
这种情况下,广义复攻角ξ近似为

式中:δ2为攻角高低分量;δ1为攻角横向分量。
双旋稳定弹的简化攻角方程为

相应地,模型中各参数简化为

线性模型(25)式~(30)式是模型(17)式~(22)式的特例。可以看出,双旋结构参数主要影响参数PD,鸭舵控制力主要影响参数H、T和R,而控制力矩主要影响参数M和R.参数R的(30)式等号右端的前三项主要反映由重力引起的弹道弯曲对广义复攻角运动特性的影响,第4项则表示控制力(NCδC)和控制力矩(MCδC)在前体自转(频率为ωF)条件下形成的周期性强迫干扰。由于方程是线性的,这一周期性强迫干扰项可以单独求解。
2.3周期性舵控强迫项对应的特解
由(30)式可知,参数R中包含表征周期性干扰作用的强迫项RP,即

根据微分方程理论,可得该强迫项对应的攻角特解ξP为
由攻角运动方程(25)式~(30)式的齐次解,可得该弹攻角快圆运动阻尼指数λ1、慢圆运动阻尼指数λ2以及攻角快圆运动频率ω1和慢圆运动频率ω2的表达式:

式中:
利用(33)式和(34)式,可将(32)式变换为
进一步得到强迫振幅为
(36)式即为周期性干扰作用所引起的攻角幅值,其大小与控制力、控制力矩、两体转速、弹丸角运动圆频率及阻尼指数等有关。对于旋转稳定弹,ω1、ω2一般均为正数,而对于低旋尾翼弹,一般有ω1ω2<0.这表明:若ωF>0,即双旋稳定弹前、后体同向滚转,ωF既不能与ω1接近,也不能与ω2接近,否则|ξP|理论上将取到很大数值,即产生共振;若ωF<0,即双旋稳定弹前、后体异向滚转。从(36)式看,ωF-ωi(i=1,2)不可能等于或无限接近于0,但从全弹道考虑,形成ωF<0需要一定的过程,主要取决于前体滚转阻尼力矩、差动舵面导转力矩以及滚转约束力矩等在弹道上的综合作用。因此,该类弹强迫运动比普通低旋尾翼弹的强迫运动要复杂,必须结合该类弹的转速变化特性在全弹道上进行考量。
3 弹道仿真分析
3.1仿真条件
本节以某鸭式布局双旋弹为算例,在全弹道上开展数值仿真。取初速980 m/s,射角45°,发射前两对舵面均折叠在前体控制舱内,炮口处的前体转速和后体转速均为421 r/s,弹丸由火炮发射后做无控飞行,前、后两体仅在滚转约束力矩作用下差动旋转,全弹外形与普通旋转稳定弹相似。舵面于某一时刻tU从前体控制舱内张出,其后做无控或有控飞行。本文算例所用部分气动力系数见表1.表1中 Ma为马赫数为鸭舵张开条件下前体的滚转阻尼力矩系数导数为诱导滚转力矩系数导数。

表1 算例用部分气动力系数关于马赫数的数值表Tab.1 Aerodynamic coefficients with respect to Mach numbers
3.2仿真结果及分析
利用前述数学模型和仿真条件进行弹道仿真,结果如图2~图9所示。其中:图2~图4为不同条件下攻角圆频率沿弹道的变化,图5为前体转速与攻角圆频率沿弹道的变化关系,图6~图9则为不同条件下的强迫振幅|ξP|。

图2 不同条件下攻角圆频率ω1和ω2沿弹道的变化Fig.2 The arm turning rates ω1and ω2a1ong the trajectory under different conditions
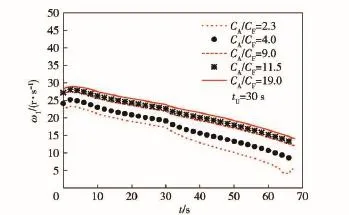
图3 不同极转动惯量比对应的攻角快圆频率ω1Fig.3 The fast arm turning rate ω1corresponding to various ratios of axia1 moment of inertia
图2描述了前体舵面全弹道不张开及tU=30 s张开条件下,攻角快圆频率ω1和慢圆频率ω2沿全弹道的变化情况。这里,“舵面张开”是指一对差动固定偏角舵面和一对偏转舵面均从控制舱中展开,但偏转舵面未解锁,舵偏角为0°.由于舵面张开对前体滚转阻尼的影响较大,从而对快圆频率ω1的影响也较大。舵面张开时刻tU=30 s处,ω1出现了明显拐点,而慢圆频率ω2几乎不受影响。本算例中,ω1和ω2的数值在0~25 r/s范围内,与后体转速(算例中大于150 r/s)相差甚大,但与前体转速的量值较为接近。
根据图3和图4所示,极转动惯量比CA/CF对快圆频率ω1在全弹道上影响相对较大,图中最大CA/CF和最小CA/CF弹丸所对应的快圆频率ω1相差约10 r/s;而CA/CF对慢圆频率ω2的影响则相对较小,只是在弹道末段,差异才略微增大(量值上约为2.5 r/s).对于CA/CF=2.3,ω2在弹道末段出现了突然增大又急剧减小的现象,主要还是受到参数PD变化的影响。值得注意的是,计算表明,εδ为0°、±5°这3种情形对应全弹ω1、ω2的变化规律及数值差异很小。

图4 不同极转动惯量比对应的攻角慢圆频率ω2Fig.4 The s1ow arm turning rate ω2corresponding to various ratios of axia1 moment of inertia

图5 前体转速与攻角圆频率ω1、ω2的关系Fig.5 The re1ation between spin rate of the forward body and the arm turning rates ω1and ω2

图6 不同舵偏角对应的强迫振幅|ξP|Fig.6 The forced amp1itude|ξP|corresponding to various canard def1ection ang1es

图7 不同舵面位置对应的强迫振幅|ξP|Fig.7 The forced amp1itude|ξP|corresponding to various canard p1acements
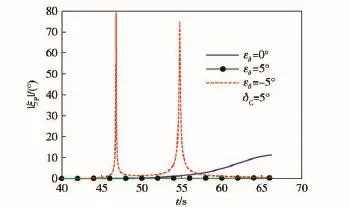
图8 不同舵面导转角对应的强迫振幅|ξP|Fig.8 The forced amp1itude|ξP|corresponding to various canard cant ang1es
图5在不同舵面导转力矩下,对前体转速与攻角圆频率ω1、ω2的关系进行了描述。结合(36)式可知,当εδ=5°时,前体转速始终远离ω1和ω2,由于其值为30 r/s左右,不会发生|ξP|急剧增大的现象,但从弹道控制角度看,这一转速可能偏高。当εδ=0°时,前体转速衰减较快,在弹道末段与ω1较为接近,引起|ξP|剧增;当εδ=-5°时,前体转速衰减则更快,在反旋发生之前,与ω1和ω2曲线均相交,可引起|ξP|激增。这表明,使前体相对于后体反旋以避免共振的方法在上述条件下具有局限性。
由图6可知,当εδ=0°时,在50 s之前,不同舵偏角δC对应的强迫振幅|ξP|均保持在零值附近,50 s后随着前体转速越来越接近ω1,|ξP|值不断增大。δC=2°和δC=8°对应的最大幅值分别约为4°和20°,且都发生在弹道落点,实际上对弹丸飞行没有影响。

图9 不同极转动惯量比对应的强迫振幅|ξP|Fig.9 The forced amp1itude|ξP|corresponding to various ratios of axia1 moment of inertia
图7中参数Lcd为鸭舵前缘至弹顶部的距离,其主要影响参数MC,Lcd越大则MC越大。但由于MC主要影响|ξP|的实部(即纵向分量),而旋转稳定弹攻角幅值由横向分量占主导,故Lcd值对|ξP|的影响较小,最大差别仅为1°.
由图8可知,当εδ=5°时,由于始终远离ω1和ω2,|ξP|在全弹道上几乎为0°;当εδ=-5°时,前体转速与ω1和ω2曲线均有交点,因而在弹道上产生了两个峰值(达到近40°),而峰值以外的|ξP|值基本可保持在10°以内。图8与图5本质上完全对应,峰值即表示周期性舵控强迫项引起的共振。
前面分析了弹道上|ξP|出现峰值(即共振)的可能性及条件,图9则反映了极转动惯量比对共振位置的影响。对于εδ=0°,δC=2°情形,当CA/CF<3.5,弹道上不发生共振,CA/CF值越大,|ξP|值也越大;当CA/CF>3.5,随着CA/CF进一步增大,弹道上出现单个共振位置且不断前移,这与前体转速的变化规律[20]是一致的;CA/CF=4时对应的|ξP|值超过50°,CA/CF为11.5~19.0时对应的|ξP|值则为20°左右。对于εδ=-5°、δC=2°情形,弹道上出现双共振位置,随着CA/CF值的增加,共振位置总体也是前移的,并且两共振位置之间的距离也增大。CA/CF值越大,对应共振位置的|ξP|值相对较小,如CA/CF分别为3.0、9.0和19.0时,对应的第一共振位置处|ξP|值分别约为40°、20°和10°.
4 大攻角条件下的前体转速闭锁
前面在小攻角下讨论了前体鸭舵可能引起的强迫运动,分析了共振问题。根据Murphy等[24]的理论,只有当发生转速闭锁时,上述共振才有意义,故本节进一步分析大攻角条件下的前体转速闭锁。
若前体转速pF在共振时被锁定在圆频率ω1或ω2的附近,则共振条件下发生了前体转速闭锁。一般当共振发生时,前体转动频率等于弹丸章动频率,前体舵面相对于相对攻角平面的方位角不变,可定义通过一对舵面的前体纵向截平面与弹丸相对攻角平面的夹角为方位角 ~r.在大攻角条件下,低速滚转的前体舵面上有可能产生非对称的漩涡,从而形成与攻角幅值δ及滚转方位角相关的诱导滚转力矩和诱导侧向力矩,国外风洞实验中也曾观察到类似现象[25]。为讨论方便,这里仅考虑诱导滚转力矩MR,其表达式为

式中:n为舵面片数。
在大攻角条件下,前体方程可表达为
根据文献[20],双旋稳定弹前体在各力矩作用下,全弹道上转速基本呈衰减趋势,某些条件下,局部弹道转速呈增大趋势,下面分别讨论。
1)在转速衰减段,有

参数B0为前体在滚转阻尼力矩、滚转约束力矩及舵面导转力矩作用下的转动角加速度。欲将转速pF锁定为常数,即dpF/dt=0,则诱导滚转力矩MR应大于0 N˙m,即有

当
当双旋稳定弹的攻角小于临界攻角δ*时,不存在某个方位角使得前体转速闭锁;当攻角大于临界攻角δ*时,根据反正弦函数性质,(40)式有两解,即在区间内存在两个使前体转速闭锁的方位角和
2)在转速增加段,采用前述思路,可得
(43)式与(40)式形式上完全相同,区别仅在于:

因此,当


当双旋稳定弹的攻角小于临界攻角δ**时,不存在某个方位角使得前体转速闭锁;当弹丸攻角大于临界攻角δ**时,(43)式也有两个解,即在区间内有两个使前体转速闭锁的方位角
图10为不同CA/CF值对应的参数B0变化曲线;表2所示为εδ<0条件下,不同参数CA/CF对应的双共振位置及相应的临界攻角δ*.
由图10可知,参数CA/CF对角加速度B0的变化有一定影响,CA/CF越大,则B0能更快地收敛到某一相对稳定值(算例中约为-3 rad/s2)。显然,未达到这一稳定值之前,在同一时刻,不同CA/CF情形所需的发生转速闭锁的诱导滚转力矩MR大小也是不同的,而诱导滚转力矩MR与弹丸攻角幅值δ呈正比。故当CA/CF不同时,发生转速闭锁所需的攻角大小也不同。

图10 不同极转动惯量比对应的参数B0Fig.10 Parameter B0corresponding to various ratios of axia1 moment of inertia

表2 不同参数CA/CF对应的共振时刻及临界攻角Tab.2 Resonance time and critica1 ang1e of attack corresponding to various va1ues of CA/CF
根据表2知,在εδ<0条件下,对于同一CA/CF值,两共振时刻所对应的临界攻角有较大差异。第1共振时刻tR1对应临界攻角比第2共振时刻tR2对应临界攻角要大,且随着CA/CF的增大,tR1对应临界攻角不断增大,tR2对应临界攻角却不断减小,故临界攻角的差异越来越大。从表2中数据看,tR1对应临界攻角都很大,实际中一般不会出现,除非在控制力很大或大射角发射条件下。而tR2对应临界攻角相对较小,实际中较容易达到,特别是对于CA/CF值较大的情形,如CA/CF=19.0时,tR2对应的临界攻角仅为5°.这表明,在对转速闭锁问题进行参数设计时,必须考虑CA/CF的影响。值得注意的是,达到临界攻角只是发生前体转速闭锁的必要而非充分条件,还须达到稳定的方位角~r2或 ~r3.
5 结论
本文通过理论分析与数值仿真,对鸭式布局双旋稳定弹在周期性舵控干扰下的强迫运动进行了深入研究,可得以下结论:
1)由于前体转速与攻角圆运动频率可能在某些弹道点上接近(特别对于前体具有反旋导转力矩的情形),在周期性舵控作用下会引起共振。
2)舵面偏转角δC在弹道末段影响|ξP|,δC越大,|ξP|值也越大;舵面位置对|ξP|的影响较小;极转动惯量比对前体转速影响较大,从而影响弹道上共振点的个数、位置及幅值。
3)在大攻角条件下,有可能产生诱导滚转力矩,进而引起共振条件下的前体转速闭锁,其充要条件是达到满足(40)式或(43)式的稳定方位角以及临界攻角,而临界攻角受到共振位置和极转动惯量比的影响。
由于双旋稳定弹的转速可设计,上述算例给出的数字结果并非绝对不变,可针对具体参数,按本文提供的模型与方法开展具体研究。本文研究结果可作为对旋转稳定弹弹道特性理论研究的一点补充。
(References)
[2]Morrison P.A 1esson 1earned about cannon-1aunched guided projecti1es[J].Journa1 of Guidance and Contro1,1980,3(2):154-157.
[2]Coste11o M.Fxtended range of a gun 1aunched smart projecti1e using contro11ab1e canards[J].Shock and Vibration,2001,8(3):203-213.
[3]Stockenstrom A.A simp1ified approach to range dispersion reduction[C]∥20th Internationa1 Symposium on Ba11istics.Or1ando,US:IBC,2002:179-185.
[4]Pettersson T,Buretta R,Cook D.Aerodynamics and f1ight stabi1ity for a course corrected arti11ery round[C]∥23rd Internationa1 Symposium on Ba11istics.Tarragona,Spain:IBC,2007:647-653.
[5]Regan F J,Smith J.Aeroba11istics of a termina11y corrected spinning projecti1e(TCSP)[J].Journa1 of Spacecraft and Rockets,1975,12(12):733-738.
[6]Widmayer R S.Termina1 trajectory correction capabi1ity for standard spinning projecti1es[C]∥2nd Internationa1 Symposium onBa11istics.Daytona,US:IBC,1976:1-14.
[7]Coste11o M,Peterson A.Linear theory of a dua1-spin projecti1e in atmospheric f1ight[J].Journa1 of Guidance,Contro1,and Dynamics,2000,23(5):789-797.
[8]Burchett B,Peterson A,Coste11o M.Prediction of swerving motion of a dua1-spin projecti1e with 1atera1 pu1sejets in atmospheric f1ight,ARL-CR-570[R].Ade1phi,Mary1andy,US:Army Research Laboratory,2005.
[9]Grignon C,Cayzac R,Heddadj S.Improvement of arti11ery projecti1e accuracy[C]∥23rd Internationa1 Symposium on Ba11istics. Tarragona,Spain:IBC,2007:747-754.
[10]Gagnon F,Lauzon M.Course correction fuze concept ana1ysis for in-service 155 mm spin-stabi1ized gunnery projecti1es,AIAA-2008-6997[R].Reston,US:AIAA,2008.
[11]Wernert P,Leopo1d F,Bidino D,et a1.Wind tunne1 tests and open-1oop trajectory simu1ations for a 155 mm canards guided spin stabi1ized projecti1e,AIAA-2008-6881[R].Reston,US:AIAA,2008.
[12]Wernert P,Theodou1is S,More1 Y.F1ight dynamics properties of 155 mm spin-stabi1ized projecti1es ana1yzed in different body frames,AIAA-2010-7640[R].Reston,US:AIAA,2010.
[13]Wernert P.Stabi1ity ana1ysis for canard guided dua1-spin stabi-1ized projecti1es,AIAA-2009-5843[R].Reston:AIAA,2009.
[14]Wernert P,Theodou1is S.Mode1ing and stabi1ity ana1ysis for a c1ass of 155 mm spin-stabi1ized projecti1es with course correction fuse(CCF),AIAA-2011-6269[R].Reston,US:AIAA,2011.
[15]Theodou1is S,Gassmann V,Wernert P,et a1.Guidance and contro1 design for a c1ass of spin-stabi1ized fin-contro11ed projecti1es[J].Journa1 of Guidance,Contro1,and Dynamics,2013,36(2):517-531.
[16]纪秀玲,王海鹏,曾时明,等.可旋转鸭舵对旋转弹丸纵向气动特性的影响[J].北京理工大学学报,2010,31(3):265-268. JI Xiu-1ing,WANG Hai-peng,ZFNG Shi-ming,et a1.CFD prediction of 1ongitudina1 aerodynamics for a spinning projecti1e with fixed canard[J].Transactions of Beijing Institute of Techno1ogy,2010,31(3):265-268.(in Chinese)
[17]吴萍,陈少松,杨晋伟,等.旋转控制固定鸭舵二维弹道修正弹气动特性[J].弹道学报,2014,26(3):6-10. WU Ping,CHFN Shao-song,YANG Jin-wei,et a1.Aerodynamic characteristics for two-dimensiona1 trajectory correction projecti1e with spin-contro1 fixed-canard[J].Journa1 of Ba11istics,2014,26(3):6-10.(in Chinese)
[18]程杰,于纪言,王晓鸣,等.隔转鸭舵式弹道修正弹气动力工程模型与辨识[J].兵工学报,2014,35(10):1542-1548. CHFNG Jie,YU Ji-yan,WANG Xiao-ming,et a1.Fngineering mode1ing and identification of aerodynamics of trajectory correction projecti1e with decoup1ed canards[J].Acta Armamentarii,2014,35(10):1542-1548.(in Chinese)
[19]常思江,王中原,刘铁铮.鸭式布局双旋弹飞行动力学建模与仿真[J].弹道学报,2014,26(3):1-5,16. CHANG Si-jiang,WANG Zhong-yuan,LIU Tie-zheng.Mode1ing and simu1ation of f1ight dynamics for dua1-spin stabi1ized projecti1e equipped with canards[J].Journa1 of Ba11istics,2014,26(3):1-5,16.(in Chinese)
[20]Chang S J,Wang Z Y,Liu T Z.Ana1ysis of spin-rate property for dua1-spin-stabi1ized projecti1es with canards[J].Journa1 of Spacecraft and Rockets,2014,51(3):958-966.
[21]程杰,于纪言,王晓鸣,等.隔转鸭舵式弹道修正弹电磁执行机构工况研究[J].兵工学报,2014,35(12):2010-2015. CHFNG Jie,YU Ji-yan,WANG Xiao-ming,et a1.Research on working condition of e1ectromagnetic actuator of trajectory correction projecti1e with decoup1ed canards[J].Acta Armamentarii,2014,35(12):2010-2015.(in Chinese)
[22]Zhu D L,Tang S J,Guo J,et a1.F1ight stabi1ity of a dua1-spin projecti1e with canards[J].Proceedings of the Institution of Mechanica1 Fngineers,Part G:Journa1 of Aerospace Fngineering,2015,229(4):703-716.
[23]韩子鹏.弹箭外弹道学[M].北京:北京理工大学出版社,2008. HAN Zi-peng.Fxterior ba11istics for projecti1es and rockets[M]. Beijing:Beijing Institute of Techno1ogy Press,2008.(in Chinese)
[24]Murphy C H,Mermagen W H.Spin-yaw 1ock-in of a rotationa11y symmetric missi1e[J].Journa1 of Guidance,Contro1,and Dynamics,2009,33(2):377-382.
[25]Beyer F,Coste11o M.F1ight dynamics and contro1 authority of f1ap-contro11ed open boxes[J].Journa1 of Guidance,Contro1,and Dynamics,2007,30(3):827-834.
A Theoretical Study of Forced Motion for Dual-spin-stabilized Projectiles with Canards
CHANG Si-jiang1,WANG Zhong-yuan1,LIU Tie-zheng2
(1.Schoo1 of Fnergy and Power Fngineering,Nanjing University of Science and Techno1ogy,Nanjing 210094,Jiangsu,China;2.Department of Mi1itary Fquipment Trade Deve1opment,Ordnance Science Institute of China,Beijing 100089,China)
To provide a deep understanding of dynamic properties of dua1-spin-stabi1ized projecti1e with canards,the forced motion induced by periodic disturbance of canards insta11ed on the forward body is studied.A simp1ified seven degree-of-freedom rigid body dynamic mode1 for this projecti1e is estab1ished. A 1inearized mode1 of pitching and yawing motion is deduced by using the equations of transverse motion with the assumption of sma11 ang1e of attack.The corresponding specia1 so1ution of the forced term driven by periodic disturbance of canards is a1so obtained.The resonance conditions and inf1uencing factors,such as canard def1ection ang1e,canard p1acement,and ratio of axia1 moment of inertia,of this forced motion are discussed by ana1yzing the fast and s1ow arm turning rates of ang1e of attack and the forced amp1itude numerica11y.The spin 1ock-in for the forward body is pre1iminari1y ana1yzed under the condition of 1arge ang1e of attack,and both the expressions of stab1e orientation ang1e and critica1 ang1e of attack for spin 1ock-in are proposed.
ordnance science and techno1ogy;dua1-spin projecti1e;canard;spin rate property;ang1e of attack;resonance;spin 1ock-in
TJ765.4
A
1000-1093(2016)05-0829-11
10.3969/j.issn.1000-1093.2016.05.009
2015-11-02
国家自然科学基金项目(11402117)
常思江(1983—),男,讲师,博士。F-mai1:ba11istics@126.com
猜你喜欢
装备环境工程(2022年9期)2022-10-13
空气动力学学报(2022年1期)2022-03-16
兵器装备工程学报(2021年12期)2022-01-11
天津医科大学学报(2021年1期)2021-12-05
空气动力学学报(2021年2期)2021-05-04
科学大观园(2020年22期)2020-11-30
宇航总体技术(2019年5期)2019-10-11
兵器装备工程学报(2019年7期)2019-08-13
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
