
建筑物变形预测模型的对比分析
2016-11-25 02:05张忠强
山西建筑 2016年28期
张忠强 崔 兵 崔 浩 路 阔
(河北大学建筑工程学院,河北 保定 071002)
建筑物变形预测模型的对比分析
张忠强 崔 兵 崔 浩 路 阔
(河北大学建筑工程学院,河北 保定 071002)
运用灰色GM(1,1)和自适应Kalman滤波两种模型,分别分析了某砖混结构建筑物的沉降变形趋势,并借助MATLAB2014平台编写了两种模型的拟合程序,基于此砖混结构建筑物的实测沉降数据,对两种模型进行了变形预测,通过这两种模型预测值与实测值的对比及模型误差的检验表明,自适应Kalman滤波模型在变形预测方面具有一定的优势。
Kalman滤波,变形预测,建筑物,沉降
0 引言
为了确保建筑物的稳定性及安全性,建筑物在施工过程中及竣工后都需要进行定期的变形监测,尤其是高层建筑物及早期的建筑物如一些高校早期建造的砖混结构教学楼或宿舍楼等。本文根据灰色GM(1,1)和自适应Kalman滤波模型理论,结合某高校砖混结构教学楼实测数据,通过MATLAB编程对这两种方法建立相应的模型,通过这两种模型的预测值与实测值的对比分析,来探讨这两种模型在建筑物的沉降变形趋势分析和预测中的应用,为及时预报险情确保生命财产安全等提供重要的依据。
1 灰色GM(1,1)模型
灰色系统理论是一门跨领域的新兴学科,灰色模型是针对小样本、贫信息的预测,也是建立系统运行趋势模型的有效方法[1,2],近年来灰色模型在预测方面已得到广泛的应用,如交通事故预测、农业产量预测以及水利工程灾害预测和建筑工程灾害预测等。灰色系统模型所需数据较少,对数据没有严格的要求,采用有限已知数据建立微分预测模型,并对事物发展规律作出模糊性的描述[3,4]。
灰色GM(1,1)一阶预测模型是时间序列常用的一种模型,其原理是通过对一阶变量的原始数据先进行一次累加处理生成一个新的数列,然后生成紧邻均值数列,通过求解一阶灰色微分方程得到拟合曲线,从而实现对系统未知量的预测。具体过程如下:
1)已知原始序列:
x(0)=[x(0)(1),x(0)(2),…,x(0)(n)]
(1)
2)生成一次累加序列:
x(1)=[x(1)(1),x(1)(2),…,x(1)(n)]
(2)

3)生成紧邻均值序列:
z(1)=[z(1)(2),z(1)(3),…,z(1)(n)]
(3)

4)建立一阶灰色微分方程:
x(0)(k)+az(1)(k)=b
(4)
其中,a,b为未知参数,记为:


YN=[x(0)(2),x(0)(3),…,x(0)(n)]。
5)对应白化方程变换:
(5)
6)求解微分方程:
(6)
7)还原一阶变量序列:
(7)

2 自适应Kalman滤波模型
自适应Kalman滤波模型就是在利用观测数据进行滤波的同时,实时地对未知的或不确切知道的系统模型参数或噪声的统计特性进行适当的估计和修正,以减弱模型误差的影响,使滤波结果更接近于实际,因此,可以在滤波过程中,利用已有信息对动态噪声方差阵进行实时估计以补偿滤波中对动态噪声方差或协方差估计的不足,这就是自适应Kalman滤波的方差补偿法,它的公式推导过程如下[5-9]:
当不考虑具有确定性输入时,离散线性系统的卡尔曼滤波模型的状态方程和观测方程为:
(8)
式(8)中,k=1,2,3,…;Φk,k-1,Ωk-1,Γk-1,Xk,Lk,Bk,Δk分别为第k-1期到第k期的状态转移矩阵,第k-1期动态噪声向量及动态噪声的系数矩阵;余下系数为第k期t时刻状态向量,观测向量,观测向量的系数矩阵及观测噪声向量。
{Ωk}和{Δk}为互不相关的零均值白噪声序列,即:
(9)
其中,DΩk为动态噪声方差;DΔk为观测噪声方差;δkj为Kronecker—δ函数。
设标准卡尔曼滤波的状态一步预测方程为:
(10)
预报误差协方差阵为:
(11)
滤波增益矩阵为:
(12)
状态滤波方程为:
(13)
滤波误差协方差阵为:
DXk,k=(I-JkBk)DXk,k-1
(14)

假定{Ωk}和{Δk}为正态序列,X0为正态向量,定义i步预测残差为:
(15)


(16)

其中,ηk+i为零均值随机变量,i=1,…,N,令:
(17)
又记:η=[ηk+1,…,ηk+N]T,则有E=AdiagDΩΩ+η。
上式是关于diagDΩΩ的线性方程组,当N≥r时,有唯一解,记diagDΩΩ的LS估计为:
diagDΩΩ=(AtA)-1ATE。
3 模型精度检验
3.1 残差检验
预测的绝对误差为:
(18)
预测的相对误差为:

(19)
3.2 后验差检验


后验差比值为:
c=S2/S1
(20)
小误差概率为:

(21)
4 工程实例
4.1 滤波初值的选取

4.2 结果分析
以河北大学某5层砖混结构建筑物为研究对象,通过在建筑物顶端四个角典型位置处布置岩土公司生产的BSIL-GS700T光纤光栅静力水准仪,通过对建筑物整体沉降的监测数据的整理,在实测数据中截取一段时间的15个样本为例,在这15个数据(见表1)中取前10个数据建模进行拟合计算,后5个(见表2)进行预测,通过MATLAB2014编写灰色GM(1,1)和自适应Kalman滤波模型的程序进行分析,并对比分析两组预测值与原始实测值的曲线吻合度及趋势。
通过前10个实测数据作为训练样本,用MATLAB编写了两个模型的程序,经MATLAB运行后得到了两种模型沉降值拟合曲线,如图1所示。将后5个数据作为检验样本代入到上述拟合曲线中,得到如图2所示的预测曲线,表2给出了实测值与两种模型的预测值及其绝对误差与相对误差。

表1 实测数据 mm
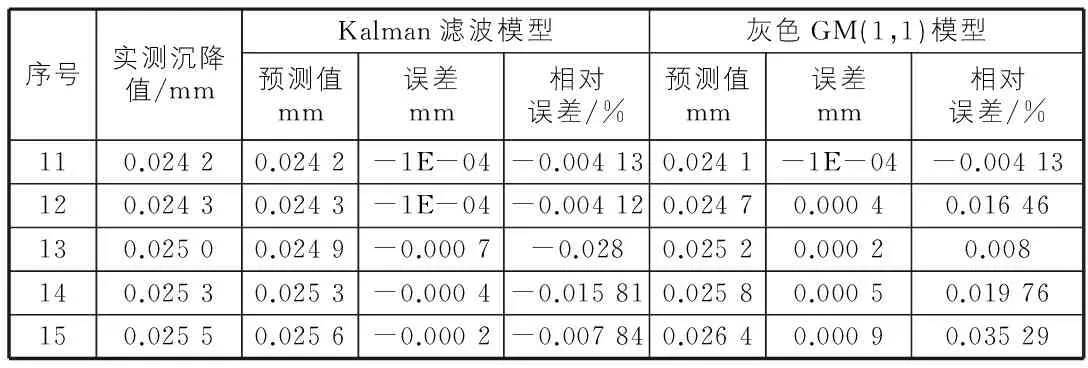
表2 模型的预测值及误差
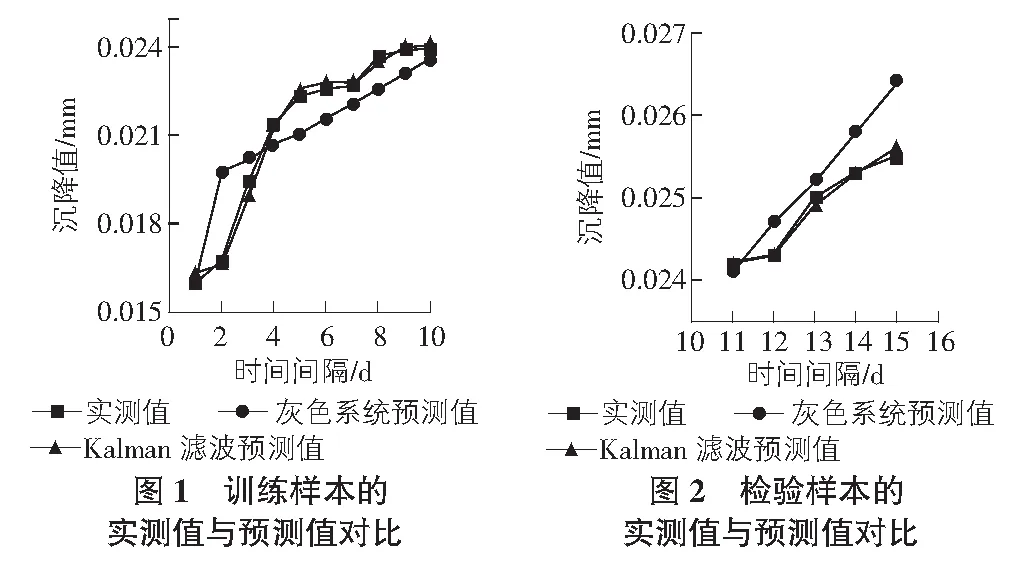
从图1可以看出,自适应Kalman滤波的拟合效果优于灰色系统模型,前者与实测值的曲线走势几乎吻合并且具有较好的拟合精度,而灰色系统模型由于对随机成分只起弱化作用,使得对数据列中的周期成分和随机成分无法进行预测,在图中表现为数据突变后有一定的滞后性。经过计算,自适应Kalman滤波模型的平均误差为-0.000 671 429,平均相对误差为0.035%,小误差概率p=100%,而灰色系统模型的平均误差为2.312 96E-19,平均相对误差为0.057%,小误差概率p=90%,由此可见自适应Kalman滤波模型的预测精度较高。
通过表1,表2及图1,图2的对比分析可知,自适应Kalman滤波模型的预测值和实测沉降值的曲线非常接近,残差值的波动较小,相对于灰色系统模型更为稳定。通过图中曲线可以发现,Kalman滤波的曲线相对于实测曲线中的一些尖端点被消弱了,曲线更平滑一些,这表明Kalman滤波模型能很好的模拟状态向量的变化规律,从表2可以看出,自适应Kalman滤波的误差相对来说较小。
5 结语
本文结合工程实例对灰色GM(1,1)和自适应Kalman滤波模型在建筑物变形监测中的应用进行了对比分析,得出如下结论:借助MATLAB2014平台,编写的两种模型的预测程序均能预测未来沉降变形的趋势。由于建筑物的沉降变形是一个动态过程,会受到诸多因素的影响,灰色GM(1,1)所反映的建筑物沉降变形的真实度会随着时间的累加而降低,可见,灰色模型适合于具有较强趋势线数据序列的预测,但是Kalman滤波在滤波时能实时地对未知的或不确切知道的系统模型参数或噪声的统计特性进行适当的估计和修正,以减弱模型误差的影响,所以受此的影响较低,在长时间的变形趋势预测精度高于灰色GM(1,1)模型。可见,自适应Kalman滤波在变形预测精度和准确性方面有一定的优势。
[1] 刘思峰,党耀国,方志耕,等.灰色系统理论及其应用[M].北京:科学出版社,2004:125-134.
[2] 邓聚龙.灰色系统理论教程[M].武汉:华中理工大学出版社,1990.
[3] 赵江平,丁佳丽.基于小波分析的灰色GM(1,1)模型道路交通事故预测[J].数学的实践与认识,2015,45(12):119-124.
[4] 刘思峰,邓聚龙.GM(1,1)模型的适用范围[J].系统工程理论与实践,2000(5):121-124.
[5] 杨昌民,崔 兵,张忠强.自适应卡尔曼滤波在建筑物变形监测中的应用[J].北京测绘,2016(2):83-85.
[6] 胡小伍.Kalman滤波在高铁桥梁变形预测分析中的应用[J].测绘地理信息,2014,39(5):58-61.
[7] 袁明月,文鸿雁,聂光裕,等.高铁变形分析中自适应Kalman滤波算法应用研究[J].公路工程,2015,40(1):55-58.
[8] 谢 波.卡尔曼滤波在建筑物变形监测中的应用[J].地矿测绘,2009,25(3):25-27.
[9] 申继鹏.卡尔曼滤波在路面检测信号处理中的应用[J].中国高新技术企业,2015(13):42-43.
[10] 陈 蕾,刘立龙,陈东银.自适应卡尔曼滤波法用于变形监测数据处理[J].测绘工程,2008,17(1):48-54.
[11] 王 琦,孙 华,李伟华,等.卡尔曼滤波在变形监测数据处理中的应用[J].工程地球物理学报,2009,6(5):658-661.
[12] 王井利,张春哲.自适应卡尔曼滤波在地铁监测中的应用[J].沈阳建筑大学学报,2014,30(2):263-268.
Comparison and analysis of building deformation prediction
Zhang Zhongqiang Cui Bing Cui Hao Lu Kuo
(CollegeofCivilEngineeringandArchitecture,HebeiUniversity,Baoding071002,China)
Using the grey GM(1,1) and the adaptive Kalman filter model analysis a brick concrete structure building settlement deformation trend respectively. Through with MATLAB2014 is developed on the platform of the two kind of model fitting procedure. The measured settlement data of a brick concrete structure building was trained on two kinds of model and the deformation prediction based on. Through the comparison of the measured and predicted values of the two models and the test of the model error, the adaptive Kalman filtering model has some advantages in deformation prediction.
Kalman filtering, deformation prediction, building, settlement
1009-6825(2016)28-0198-03
2016-07-29
张忠强(1989- ),男,在读硕士; 崔 兵(1991- ),男,在读硕士; 崔 浩(1991- ),男,在读硕士;
TU196.1
A
路 阔(1993- ),男,在读硕士
猜你喜欢
小学生学习指导(低年级)(2020年3期)2020-06-02
北京航空航天大学学报(2017年9期)2017-12-18
Coco薇(2017年2期)2017-04-25
Coco薇(2017年2期)2017-04-25
为了孩子(3~7岁)(2016年8期)2016-05-14
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27
