
基于坐标变换的永磁同步电机电流传感器容错控制*
2016-12-28 07:58陈宇航张云峰
电机与控制应用 2016年11期
马 雷, 陈宇航, 张云峰
(中国矿业大学 信息与电气工程学院, 江苏 徐州 221008)
基于坐标变换的永磁同步电机电流传感器容错控制*
马 雷, 陈宇航, 张云峰
(中国矿业大学 信息与电气工程学院, 江苏 徐州 221008)
研究了在永磁同步电机矢量控制系统之下,电流传感器的故障诊断及容错控制。针对目前双电流传感器的矢量控制系统中可能出现的软故障,提出一种基于定子坐标变换的故障诊断及容错方法,通过控制器输出的电流值与实际反馈的电流值相比较,来判断故障类型并选择相应的容错方案。仿真结果表明:该方法能准确判断出一相或两相电流传感器故障,并选择相应的实际电流计算值来完成电流闭环控制,具有较高的可行性。
永磁同步电机; 电流传感器; 故障诊断; 容错控制
0 引 言
近年来,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)以其体积小、重量轻、高磁能积等优点在电气传动领域得到了广泛的应用。在高性能调速场合中,电流传感器是重要的采集电流信号的元件,在复杂的自然环境(如高低温、粉尘、雨水)与电磁环境[如电磁干扰(Eletromagnetic Interference, EMI)、过电压、过电流]下易发生软故障,即精度受到影响或发生间歇性的断线,将会直接影响到PMSM的调速性能。因此,针对PMSM电流传感器的故障诊断与容错控制成为交流调速领域的热点问题之一。
现有的对于电流传感器的故障诊断与容错控制的方法主要分为两大类:硬件冗余方法和基于软件的状态重构方法。硬件冗余方法是指使用多个相同的组件,通过输入的信号来判断各个组件的运行状态,一旦有组件发生故障,可迅速切换至其他组件,即通过留有备用组件的方式来确保系统运行的可靠性,但这种方式无疑增加了设备成本。近年来,随着控制理论与DSP等数字化控制芯片的发展,通过软件进行状态重构的方法已经成为了主流。常见的方法有状态观测器法、基于直流母线电流的相电流重构法、坐标变换法等[1-4]。
基于这些思想,国内外学者提出了一些解决方案。文献[5-7]将观测器所观测出的电流信息与实际的电流测量值的差与电流传感器运行的安全阈值进行比较,来判断传感器故障与否。当判断结果为故障状态时,使用状态观测器的重构电流值来完成闭环控制。文献提出一种基于单电流传感器的矢量控制方法。当一相电流传感器发生故障时,其值通过dq轴的电流给定值在经Park反变换后与静止坐标系中的电压、磁链方程计算得到,然后完成电流环的闭环控制。但电机控制系统十分依赖电机参数,而电流观测器的构造大都会用到电机参数,这会对观测器的观测效果产生影响,在低速时这种影响尤为严重。直流母线电压重构定子相电流的容错方法,也是近年来研究的热点之一。此方法适用于两相电流传感器都发生故障时的情况,但该方法需要解决的关键问题是最小采样时间的问题,即在低调制度区域与单位矢量附近区域,由于空间电压矢量作用时间太短而无法满足最小采样时间。针对此问题,文献提出了基于脉冲移位来增大采样时间的方法。此方法改变了调制策略,引入了另外两个单位矢量,在保证足够的采样时间的前提下使空间电压矢量的幅值不变。文献[10-12]通过使用矢量脉冲插入法来满足最小采样时间。该法就是在传统SVPWM算法中的相邻开关周期之间插入一个脉冲序列,在每个脉冲作用的时段内对母线电流进行采样,这样就可以准确地得到绕组的相电流,增加的这三个测量脉冲的矢量和为零,从而并不影响最终合成的电压矢量。但这两种方法都会增大开关损耗与电流谐波含量,且牺牲一部分电机性能。
PMSM不需要像异步电机矢量控制系统一样,在实现高性能调速系统时需要根据转速的大小设计基于不同模型的转子磁链观测器,控制结构更加简约,但其应用场合多为高精度伺服系统、高性能传动系统等,这意味着其对采样数据的可靠性有着更高的要求。本文在上述思想的基础上介绍一种基于坐标变换的容错方法。其思想是根据坐标变换所得到的αβ相电流的给定值与实际值的差是否超过安全阈值来判断出故障相,再通过逻辑判断选择出合适的电流值来完成闭环控制。
1 基于不同轴定向的PMSM相电流坐标变换
PMSM矢量控制系统一般采用两个电流传感器。这两个电流传感器可以安装在任意两相上,本文假设安装在a、b两相上。在进行Clark坐标变换时,假设定子a相轴线与变换后的α相轴线重合,则ab相坐标系变换至αβ相坐标系如式(1)所示。
(1)
由式(1)可知,当a相传感器发生故障时,α与β相电流数据都会异常;当b相传感器发生故障时,α相电流数据是正常的,只有β相电流数据发生异常。当定子b相与α相轴线重合时,如图1所示,即αβ相坐标系在原有基础上逆时针旋转120°,此时相对应的坐标变换如式(2)所示。
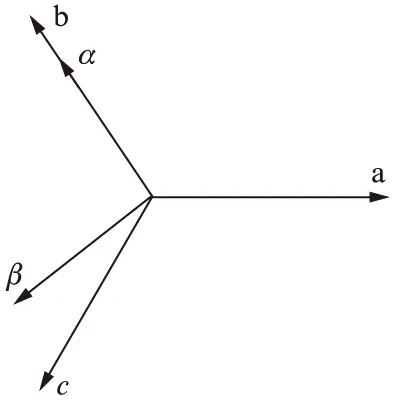
图1 b相轴线与α相轴线重合
(2)
由式(2)可知,当a相传感器发生故障时,α相数据正常;当b相传感器发生故障时,α与β相电流数据都会异常。
综合来看,根据式(1)与式(2)可知,当发生传感器故障时,选择适当的坐标变换可得到正常的α相电流。
本文所介绍的容错控制方法是通过判断给定电流值与实际电流值的差值是否超过系统的安全阈值的方式来进行的,所以还需要得到基于αβ相坐标系的电流给定值。可以根据PI调节器输出的给定值经过Park反变换得到。如图2所示,当α相轴线与定子a相轴线重合时,可得到αβ相坐标系下的电流给定值如式(3)所示。
(3)
式中:θ——同步旋转坐标系d轴与a相轴线的夹角;
id*、iq*——电流给定值。
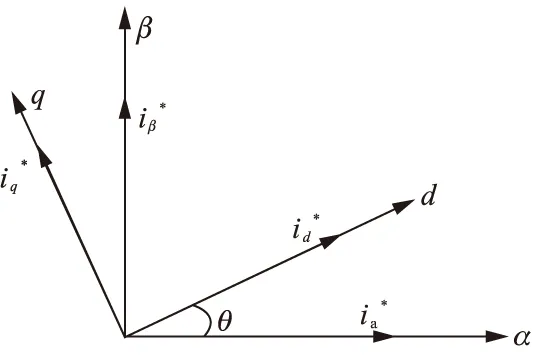
图2 a相轴线与α相轴线重合
与图1类似,在图3中,当b相轴线与α相轴线重合时,根据电压空间矢量幅值不变可得到电流给定值由dq轴坐标系变换至αβ轴坐标系的表达式[13]如式(4)所示。
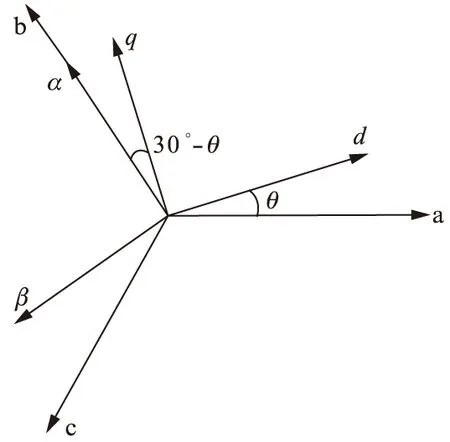
图3 b相轴线与α相轴线重合
(4)
式中:iαest*与iβest*——当b相轴线与α相轴线重合时,α与β相的电流给定值。
由以上坐标变换可得到8个对应的电流值,接下来便以此为基础来说明容错控制的方法。
2 基于坐标变换的电流传感器容错控制方案
本方案的核心思想在于通过αβ轴坐标系上的给定值与实际反馈值的差是否超过系统所设定的安全阈值来判断出电流传感器是否出现故障,判断出是哪一相故障之后,再选择对应的电流值来完成电流环的闭环控制。安全阈值则需要通过实际所带的负载大小,经过数次调试来确定,综合考虑各种可能造成误差的因素后,选取安全阈值k约为iq的15%,当电流传感器发生故障时,对应的电流值选择如图4所示。

图4 电流值选择逻辑框图
在电流值选择的过程中,将图4所示的3个电流差值输入滞环比较器,输出为常数1或0,分别代表故障与正常状态。将这3个常值分别赋给X、Y、Z,其中X、Z可分别判断a、b相电流传感器的工作状态,Y值可用来选取β相电流值。如此,a、b相电流传感器的工作状态便与X、Z的值有了一一对应的关系,如表1所示。根据表1和图5~图7中所示,便可以判断出故障相并选择合适的电流完成电流闭环。由图5可知,将α、β轴电流的给定值与实际值之差通过滞环比较器,便可判断出a相传感器是否故障以及选择出合适的β轴电流,其中X的值可同时用来选取进行坐标变换的角度。图6中,根据图3与图1中坐标变换所得到的α相电流差值,可以判断出b相传感器是否故障。图7可用来判断两相是否均发生故障及选取用来完成闭环的电流值。

表1 传感器工作状态与X、Z值的关系
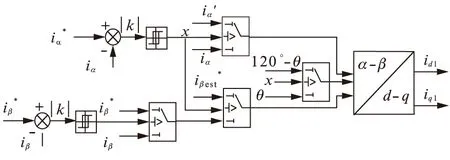
图5 X、Y值判断a相传感器状态与β轴电流取值

图6 Z值判断b相传感器状态
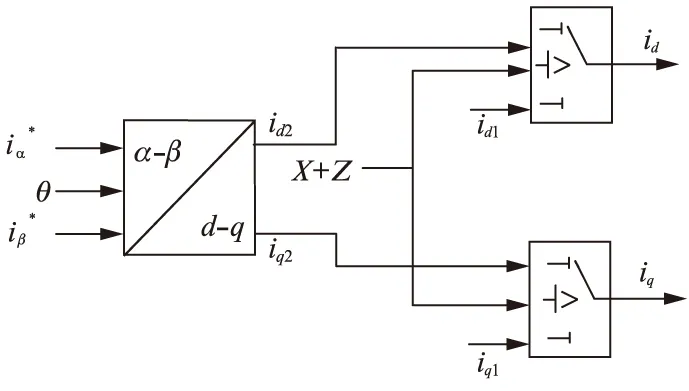
图7 判断两相传感器是否都发生故障及电流选取
最终,基于坐标变换的电流传感器容错控制系统的总体框图如图8所示。
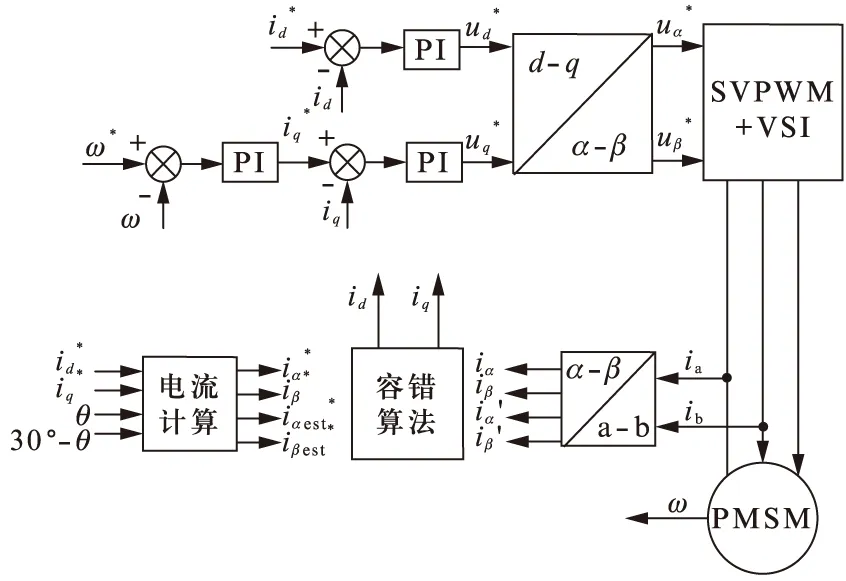
图8 基于坐标变换的电流传感器容错控制系统框图
3 仿真研究
本文利用MATLAB/Simulink来验证所提出的电流传感器容错控制算法。以实验室现有的22kW PMSM参数作为仿真参数,如表2所示。
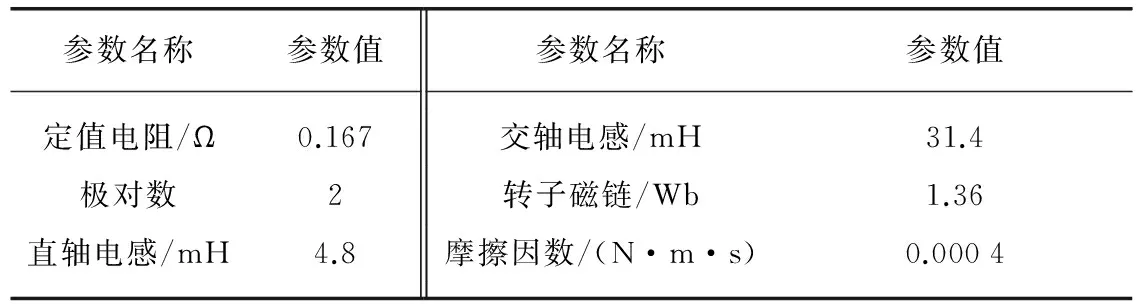
表2 PMSM参数
仿真试验分为a相电流传感器故障与两相电流传感器均发生故障两种工况,仿真时间设为3s。一开始电流传感器正常工作,在t=1.5s时将电流传感器输出置零。当仅a相电流传感器发生故障时,仿真结果如图9所示。图9(a)为当α相与a相轴线重合时α相的电流实际值与给定值以及当α相与b相轴线重合时α相的电流实际值。
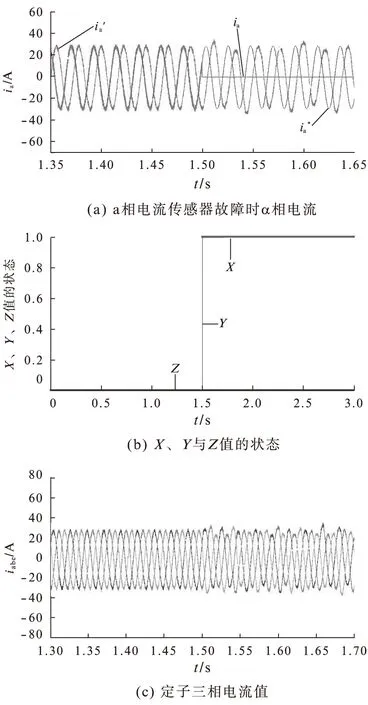
图9 a相电流传感器故障时仿真结果


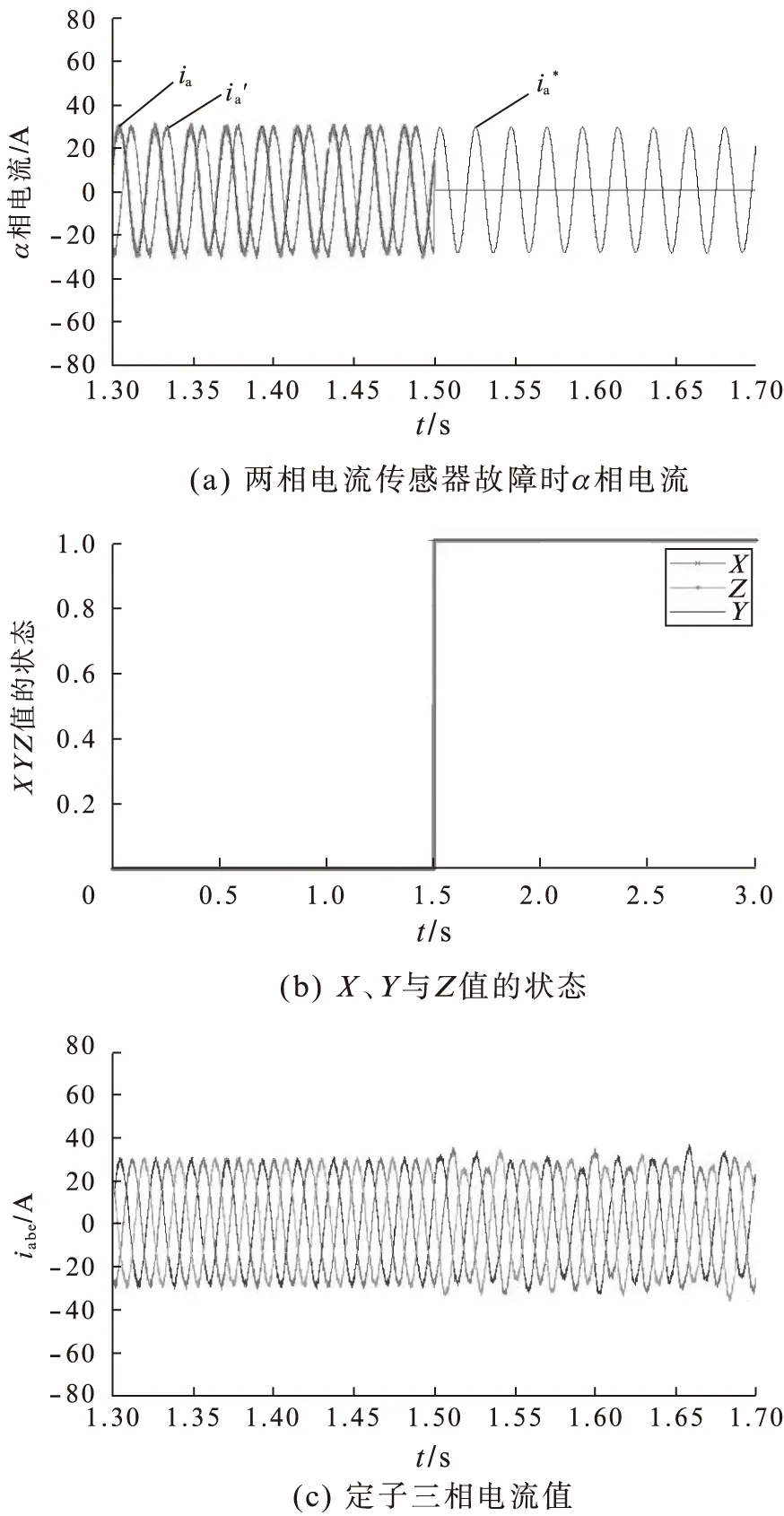
图10 两相电流传感器均故障时仿真结果
以上仿真结果表明,当两相电流传感器发生故障时,iα与iα′的值变为零,符合式(1)、式(2)所述。X、Y与Z的值在1.5s时均变为1,说明系统在此刻准确判断出了故障相并选择了合适的β相电流的输出。图10(c)说明该容错算法能保证电流环完成闭环控制而电流幅值波动并不明显。
4 结 语
本文提出一种基于坐标变换的PMSM电流传感器的容错控制方法。该方法通过坐标变换得到不同轴定向的8个电流值,将特定的电流实际值与给定值做差输入滞环比较器,根据输出的值可得到与电流传感器状态的一一对应关系,判断出故障的传感器后选择出合适的电流来完成闭环,使矢量控制系统得以继续运行。仿真结果表明,本文提出的方法能准确判断出电流传感器是否发生故障,并能同时选择出合适的电流值来完成电流闭环,能有效保证工业系统运行过程中的连续性需求,避免因故障停机而造成重大经济损失。
[1] 徐殿国,刘晓峰,于泳.变频器故障诊断及容错控制研究综述[J].电工技术学报,2015,30(21):1-12.
[2] 高岩.永磁同步电机驱动系统开路故障诊断及容错控制.电机与控制应用,2014,41(1):37- 41.
[3] 程辉,杨克立.一种感应电机软起动器容错控制系统的设计.电机与控制应用,2014,41(8):64-68.
[4] 周近,黄晓晖.开关磁阻电机位置传感器故障的实时诊断与容错控制研究.电机与控制应用,2015,42(6):77-84.
[5] LEE K S, RYU J S. Instrument fault detection and compensation scheme for direct torque controlled induction motor drives[J].IEEE Proceedings of Control Theory and Applications,2003,150(4) :376-382.
[6] ZHANG X N, FOO G, DON V M, et al. Sensor fault detection,isolation and system reconfiguration based on extended Kalman filter for induction motor drives[J].IET Electric Power Applications,2013,7(7):607-617.
[7] FREIRE N M, ESTIMA J O, CARDOSO A J M. A new approach for current sensor fault diagnosis in PMSG drives for wind energy conversion systems[J].IEEE Transactions on Industrial Applications,2014,50(2) :1206-1214.
[8] VERMA V, CHAKRABORTY C, MAITI S, et al. Speed sensorless vector controlled induction motor drive using single current sensor[J].IEEE Transactions on Energy Conversion,2013,28(4) :938-950.
[9] MARCETIC D P, ADZIC E M. Improved three-phase current reconstruction for induction motor drives with DC-link shunt[J]. IEEE Transactions on Industrial Electronics,2010,57(7):2454-2462.
[10] KIM H, JAHNS T M. Phase current reconstruction for AC motor drives using a DC link single current sensor and measurement voltage vectors[J]. IEEE Transactions on Power electronics,2006,21(5):1413-1419.
[11] HA J I. Current prediction in vector controlled PWM inverters using single DC-link current sensor[J]. IEEE Transactions on Industrial Electronics,2010,57(2):716-726.
[12] CHO Y H, LABELLA T, LAI J S. A three-phase current reconstruction strategy with online current offset compensation using a single current sensor[J]. IEEE Transactions on Industrial Electronics,2012,59(7):2924-2933.
[13] 陈伯时.电力拖动自动控制系统——运动控制系统.北京:机械工业出版社,2003.
Current Sensor Fault Detection and Isolation Technique for Permanent Magnet Synchronous Motor Based on Axes Transformation*
MALei,CHENYuhang,ZHANGYunfeng
(College of Information and Electrical Engineering, China University of Mining and Technology,Xuzhou 221008, China)
A technique for fault detection and isolation to make the traditional vector control of PMSM system drive fault tolerant against one or two phase current sensor soft failure were presented. Comparison between the output current value and the feedback value, the proposed current axes transformation were expected to determine the fault type and select the appropriate fault tolerance scheme. The simulation results showed that the control system could accurately judge the one or two phase current sensor faulty and select the corresponding current calculation value to complete the current closed-loop control, with a high feasibility.
permanent magnet synchronous motor (PMSM); current sensor; fault detection; fault tolerant control
江苏省煤矿电气与自动化工程实验室建设项目(2014KJZX05)
马 雷(1991—),男,硕士研究生,研究方向为电力电子与电力传动和轨道交通故障诊断。 陈宇航(1992—),男,硕士研究生,研究方向为新能源发电技术。 张云峰(1991—),男,硕士研究生,研究方向为大功率传动系统控制。
TM 301.2:TM 351
A
1673-6540(2016)11- 0017- 06
2016-04-05
猜你喜欢
电工技术学报(2022年20期)2022-10-29
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
日用电器(2022年4期)2022-05-26
微电机(2022年1期)2022-03-21
现代仪器与医疗(2021年6期)2022-01-18
装备制造技术(2020年11期)2021-01-26
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
顺德职业技术学院学报(2020年2期)2020-07-10
大众科学·上旬(2020年2期)2020-03-30
