
基于自适应速度前馈补偿的快速伺服系统研究
2016-12-28 07:58文建刚周亚军张竟飞
电机与控制应用 2016年11期
文建刚,周亚军,张竟飞,张 格,何 颐
(中国航天科技集团公司 第四研究院第四十一研究所, 陕西 西安 710025)
基于自适应速度前馈补偿的快速伺服系统研究
文建刚,周亚军,张竟飞,张 格,何 颐
(中国航天科技集团公司 第四研究院第四十一研究所, 陕西 西安 710025)
设计了一种带有模型参考自适应速度前馈补偿的快速响应电动伺服系统,解决了无减速器电机直驱系统或小减速比伺服系统的大负载扰动问题。所采用的控制策略既发挥了模型参考自适应控制的优点,又避免了复杂而严格的稳定性约束问题,使得系统可以大范围适应输入和控制增益的变化。仿真试验结果表明该系统对负载扰动具有较强的自适应能力,控制策略易于实现,具有较强的实用意义。
快速伺服系统; 模型参考; 自适应速度前馈补偿; 负载扰动
0 引 言
电动伺服系统由于设计简单、维护方便,应用日趋广泛。在一些对快速性要求极高的系统,如传统上一直由电磁阀系统、气动系统等实现的快速开关控制、导弹的“bang-bang”舵控制,也逐渐开始采用电动伺服系统。但这类系统要求响应极快,因此往往采用高转速的伺服电机直接驱动负载,或仅采用减速比很小的减速器。如本文研究的燃气阀门快速开关系统,要求平均转速达到10000°/s以上。由此带来的问题是:相比带减速器的伺服系统,伺服电机的低速脉动现象明显,系统稳态精度差;压强变化、燃烧残留物等产生的摩察力矩与电机的输出力矩量级相当,且具有非线性、时变性特点,导致系统动态品质变差。
要解决上述问题,用线性的PID控制策略或简单的扰动补偿往往难以奏效。此时,系统面临的已不再是微小的扰动,而是参数的大范围显著变化和非预期变化。对于这类系统,需要解决的问题是使系统具有一定的自适应能力,在被控对象特性参数大范围显著变化时仍能自动地保持或接近最优的运动状态,从而保证系统的动态品质和稳态精度。显然,自适应控制是解决此类问题的有效手段[1-12]。但自适应控制的设计和实际使用都很复杂,极大地限制了其工程应用。本文提出了一种实用的基于模型参考自适应控制思想的前馈补偿控制策略,使系统对负载扰动具有较强的自适应能力,且控制律不需要复杂的计算,易于工程实现。
1 快速开关伺服系统的控制方案
如上所述,本文研究的快速开关伺服系统对动态响应要求高,需采用自适应控制思想解决强扰动问题。由于伺服电机本身的控制特性较好、数学模型简单,借鉴模型参考自适应控制思想是较为可行并易于工程应用的方案。
不管是位置伺服系统,还是调速系统,实质上都是通过对电机转速的直接控制来达到目的的。几乎所有的负载扰动对位置伺服系统带来的影响都直接体现在调速性能上。因此,只需要提高调速环节的抗扰动能力就能解决问题。仅针对调速环节采取控制策略,也可使问题简化。
借鉴模型参考自适应控制的思想[13-17],设定一个理想的调速参考模型,以参考模型与实际模型的广义误差函数作为调速环节的前馈补偿。这种补偿不需要对扰动特性进行辨识,对非预期变化的扰动也表现出较强的自适应能力。
解决了调速问题,位置环的设计也就变得简单了。带有自适应速度前馈补偿的伺服系统框图如图1所示。

图1 带有自适应速度前馈补偿的伺服系统框图
2 快速响应伺服系统设计
2.1 直流伺服电机的模型
按照模型参考自适应控制的设计思想,先要设计一个理想的参考模型[18-21]。因为伺服电机本身是模型较为简单的理想控制元件,可由伺服电机的传递函数得到参考模型。
根据电机的平衡方程,经拉普拉斯变换并整理后,可得
(1)
Tem(s)=KtIa(s)
(2)
(3)
Ea(s)=KeΩ(s)
(4)
式中:Ω——电机转速;
J——转动惯量;
Tem——电磁转矩;
Tc——总的阻转矩;
Kt——转矩常数;
Ia——电枢电流;
La——电枢电感;
Ra——相间电阻;
Ua——控制电压;
Ea——电枢反电势。
根据式(1)~式(4)可绘制出伺服电机的动态模型框图,如图2所示。此模型可以直接对系统施加各种类型的负载扰动。

图2 伺服电机的动态模型框图
为了减轻控制器的计算负担,还希望得到更简单的参考模型。忽略电机的电气时间常数,并将负载视为扰动,电机的传递函数可近似为一阶惯性环节:
(5)
式中:Ke——反电势系数;
τm——机械时间常数。
2.2 模型参考自适应前馈补偿调速系统设计
以式(5)作为理想的参考模型,并用图2所示的模型作为实际电机模型,可得到典型的模型参考自适应调速系统,如图3所示。
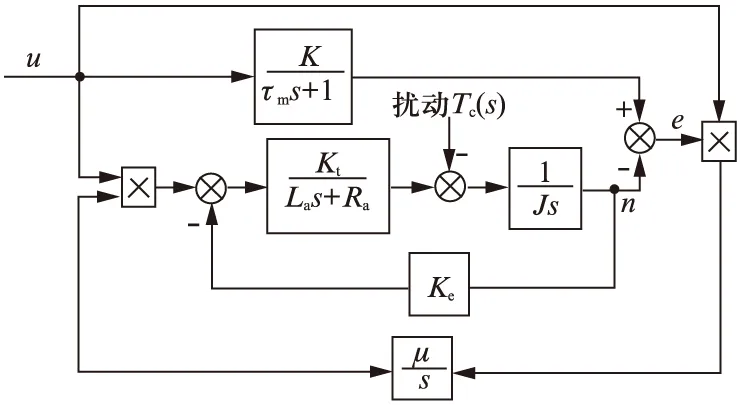
图3 模型参考自适应调速系统
众所周知,不管是模型参考自适应控制方案,还是用李亚普诺夫稳定性理论设计的自适应控制方案,本质上都是非线性控制。两个乘法器,将导致系统对输入信号和自适应增益有严格的限制,否则系统不稳定。
为此,可减少一个乘法器,将系统变为一个具有理想模型参考的自适应前馈补偿系统,如图4所示。由于该系统减少了非线性环节,从而消除了系统对输入和控制增益的严格限制。在后面的分析中可以看到,系统能大范围适应输入和控制增益的变化,控制增益μ的调试与PID参数的调试一样容易,前馈的引入也没有影响调速环节的稳定性。
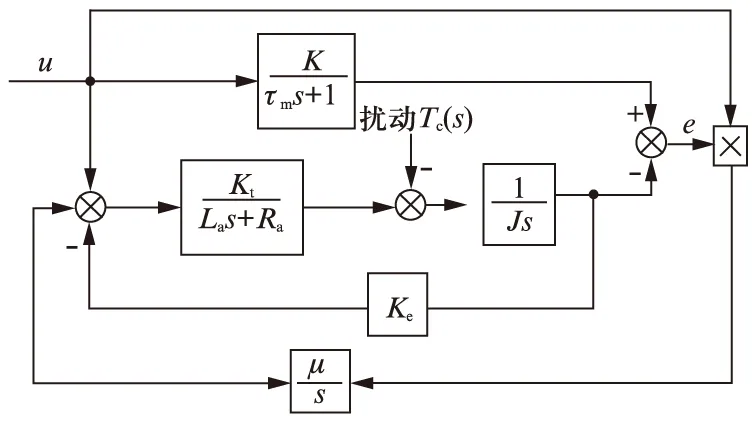
图4 模型参考自适应前馈补偿调速系统
2.3 位置环设计
由于采用了自适应的速度前馈补偿,负载扰动的问题已得到根本性的解决,位置环的设计就变得简单了,只需按常规的PID设计即可,此处不再赘述。
3 仿真分析
3.1 参数设置
根据所选的直流伺服电机参数,代入模型可得带实际参数的系统,如图5所示。考虑到实际电机系统的控制量不能无限大,仿真时在相关位置设有限幅器。
3.2 带自适应前馈补偿的调速系统仿真分析
3.2.1 无前馈补偿的速度响应曲线
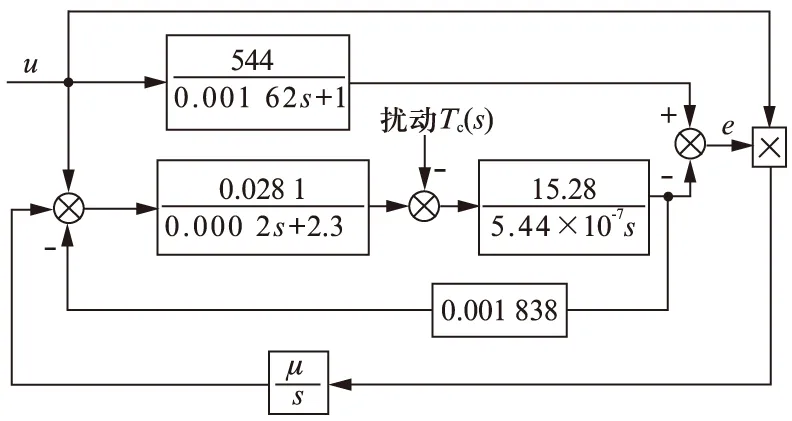
图5 带实际参数的自适应前馈补偿调速系统
不采取任何措施,电机在负载扰动下的速度阶跃响应曲线如图6所示。在1.5s时对系统的电机端施加150mN·m(相当于电机额定负载力矩的3倍,这也符合实际工作中的力矩量级)的阶跃负载。从图6可看出,速度从10880°/s 瞬间拉低至4200°/s,之后一直维持在4200°/s。可见负载扰动对电机调速性能的影响很大,无扰动补偿的调速系统基本不具备抗扰能力。
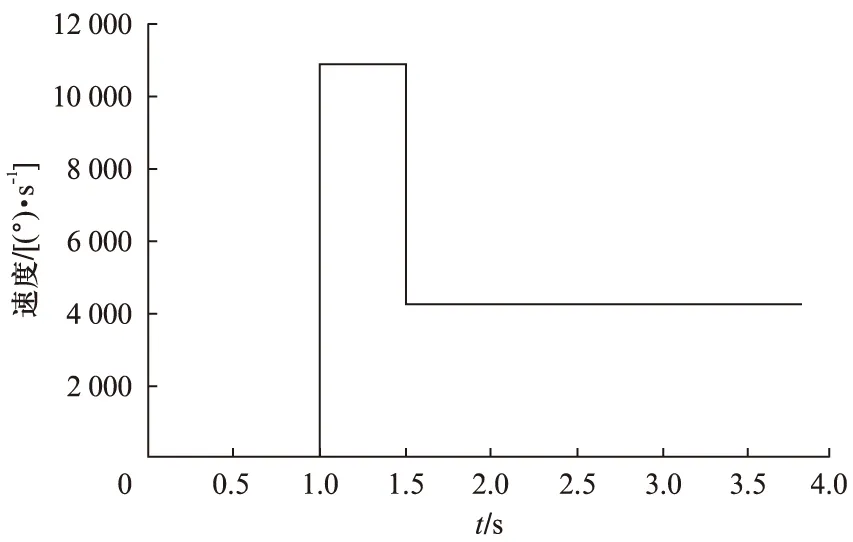
图6 负载扰动下的无前馈补偿速度曲线
3.2.2 具有自适应前馈补偿的速度响应曲线
对图5所示系统,μ取0.6,在1.5s时对系统的电机端施加150mN·m的阶跃负载,得到如图7所示的速度响应曲线。从图7可看出,1.5s时速度从10880°/s拉低至6500°/s,约8ms后迅速拉回并稳定在10880°/s。系统表现出了较强的对负载扰动的自适应能力。
3.2.3 控制增益对抗扰性能的影响
对图5所示系统,将控制增益μ增大,取μ=1.5,施加的扰动不变,得到如图8所示响应曲线,速度被拉低到7300°/s后约4ms拉回。可见,μ的取值越大,速度被拉低的幅度越小,恢复的速度越快。但太大的μ值,可能会引起振荡,因此也不宜过大。即便如此,系统也表现出明显优于自适应控制的稳定性。
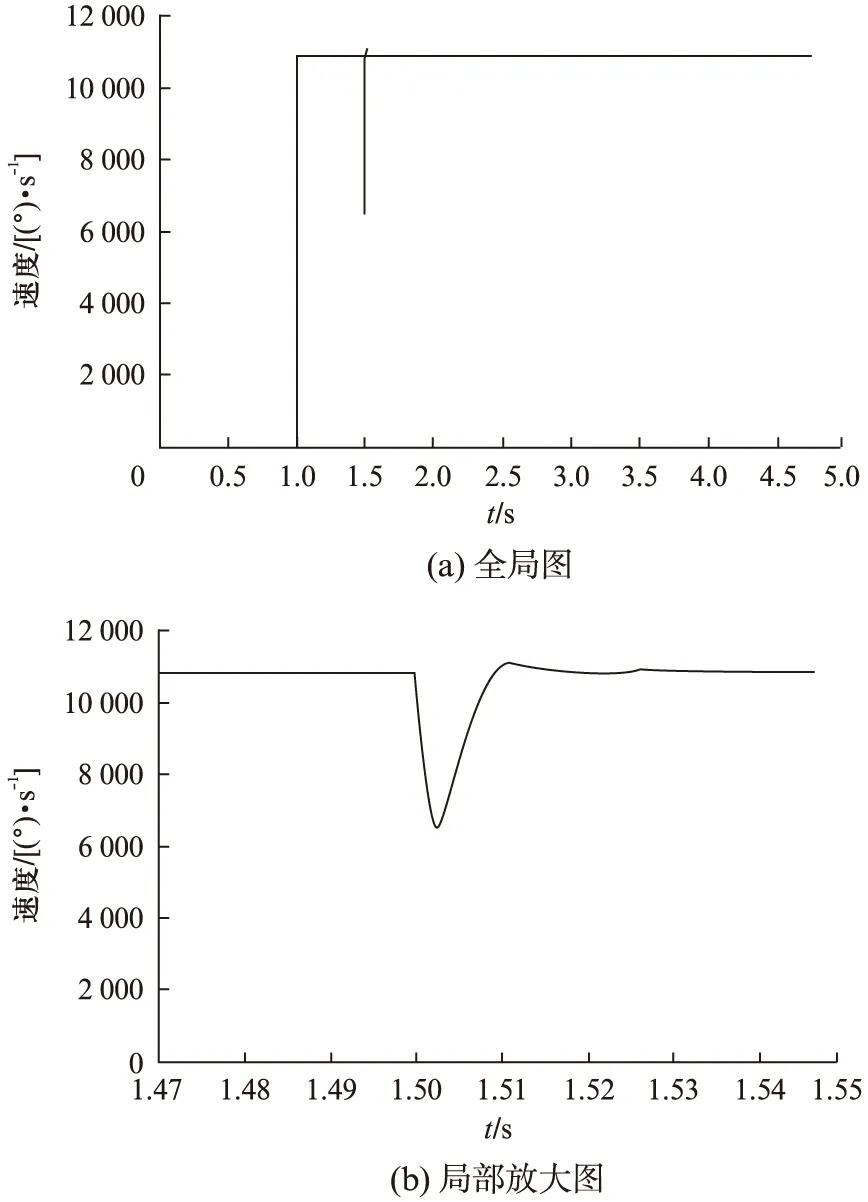
图7 负载扰动下具有自适应前馈补偿的速度曲线

图8 μ增大后的速度响应曲线
3.3 伺服系统性能分析
3.3.1 无前馈补偿的伺服系统分析
在无前馈补偿的伺服系统中施加300mN·m(实际系统负载扰动可能达到的最大极限值)阶跃负载,得到如图9所示的响应曲线。系统在受扰后稳态值从100°迅速变为95°,而后保持不变,系统无恢复能力。
3.3.2 带自适应速度前馈补偿的伺服系统分析
将图5所示的调速环节代入位置伺服系统,只需要进行简单的PID参数设置就可以得到满意的动态性能和控制精度。系统在300mN·m(实际系统负载扰动可能达到的最大极限值)阶跃负载下的响应曲线如图10所示。由图10(a)可知,系统在受扰后稳态值无明显变化。从图10(b)、图10(c)可知,将施加负载扰动的时间点与指令同步后,响应时间从10ms变为12ms。可见扰动对系统动态性能的影响有限。

图9 无速度前馈补偿的伺服系统角度响应曲线
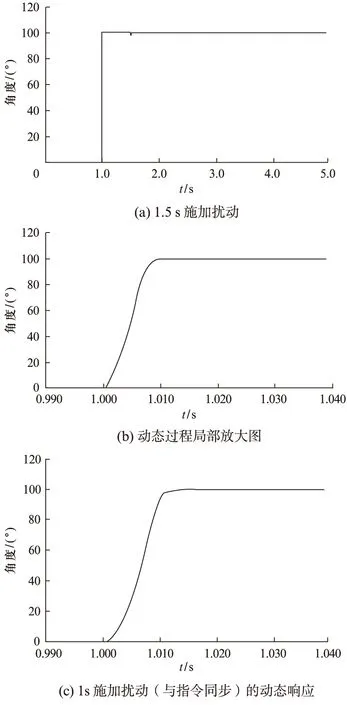
图10 自适应速度前馈补偿的伺服系统响应曲线
4 结 语
采用模型参考自适应前馈补偿后,电机的速度响应表现出较强的抗扰性能。相应地,伺服系统位置环也对强负载扰动表现出较强的自适应能力。
本文采用的前馈补偿控制,参数调试简单,既发挥了自适应控制的优势,又避免了复杂而严格的稳定性约束问题,是一种较为实用的伺服控制方案。
[1] 陈复扬,姜斌.自适应控制与应用.北京:国防工业出版社,2009.
[2] 梅晓榕,柏桂珍,张卯瑞.自动控制元件及线路.北京:科学出版社,2005.
[3] 蒋敬文,雷友琴.自适应前馈控制器及其应用.河北机电学院学报,1994,11(3):37- 40.
[4] 袭著燕,长厚,潘伟,等.基于预滑-动态摩擦力矩估计模型的自适应前馈补偿方法.机械工程学报,2007,43(10):175-180.
[5] 王勉华,彭田野,胡春龙.基于模糊自适应PI控制的SRM直接瞬时转矩控制系统.电机与控制应用,2014,41(6):1- 4.
[6] 周悦,郭威,郭庆鼎,等.最优预见补偿控制在PMLSM伺服系统中的应用.沈阳建筑大学学报(自然科学版),2000,16(1):75-78.
[7] 沈显庆,王成元.基于预见前馈补偿的直线永磁同步电动机的位置伺服控制系统.自动化技术与应用,2006,24(4):7-9.
[8] 韩春宝.基于直线电机非参数模型闭环预测控制的研究. 组合机床与自动化加工技术,2007(6):59- 61.
[9] 姬伟,李奇.自适应模糊PID控制器在跟踪器瞄准线稳定系统中的应用.控制理论与应用,2008,25(2):278-282.
[10] 陈涛,陈娟,陈长青.直流力矩电机低速自适应跟踪控制.光电工程,2003,30(3):31-34.
[11] 侯宏录,周德云,王伟,等.模糊PID控制在光电跟踪控制系统中的应用.光电工程,2006,33(5):12-16.
[12] 刘芳璇,王桂荣.基于自适应模糊微分积分滑模的无速度传感器永磁同步电机运行研究.电机与控制应用,2014,41(9):7-11.
[13] 王云良,王继水,王敏其.无刷直流电机自适应模糊优化控制.电机与控制应用,2014,41(11):14-17.
[14] 高嵩,徐晓霞,肖秦琨,等.机载光电跟踪系统的模糊自适应控制.西安工业大学学报,2009,29(6):565-569.
[15] 仝昭军,刘珊中,李燕凡.机载光电跟瞄平台的模糊自适应PID跟踪控制.电光与控制, 2014,21(4):65-68.
[16] 湛腾西,张国云,胡文静.基于前馈补偿和模糊PID的提馏段温度串级控制系统.炼油技术与工程,2008,38(11):47-51.
[16] 辛毅,程勉,高为炳.工业机器人任务坐标空间中的自适应控制.机器人,1987(2):22-25.
[17] 马孜,范俭,柴天佑.具有超稳定结构的鲁棒自适应控制器.自动化学报,1997,23(6):802-806.
[18] 向红标,谭文斌,李醒飞,等.基于LuGre模型的自适应摩擦补偿.机械工程学报, 2012,48(17):70-74.
[19] 夏长亮,祁温雅,杨荣,等.基于RBF神经网络的超声波电机参数辨识与模型参考自适应控制.中国电机工程学报,2004,24(7):117-121.
[20] 龚贤武,徐淑芬,张丽君,等.永磁同步电机模糊自适应补偿速度控制系统.计算机仿真,2014,31(1):356-360.
[21] 朱海荣,李奇,顾菊平,等.扰动补偿的陀螺稳定平台单神经元自适应PI控制.电机与控制学报,2012,16(3):65-70.
引领技术发展趋势 报道经典实用案例 反映行业最新动态
Research on Fast-Response Servo System Based on Adaptive Speed Feed-Forward Compensation
WENJiangang,ZHOUYajun,ZHANGJingfei,ZHANGGe,HEYi
(The 41st Institute of Fourth Academy, China Aerospace Science and Technology Corporation,Xi’an 710025, China)
A fast-response electrical servo system which had model reference adaptive speed feed-forward controller was designed, aiming to resolve the problem of big load disturbance on the servo system without reducer or with small reduction ratio. The control strategy not only took the advantages of model reference adaptive controller, but also avoided the problem of strict and complicated stability constraint. The system could adapt wide-range variations of input and control gain. Simulation results showed that the servo system had strong adaptive ability to the load disturbance. The control strategy was practical and easy to realize.
fast-response servo system; model reference; adaptive speed feed-forward compensation; load disturbance
文建刚(1978—),男,硕士研究生,高级工程师,研究方向为舵机等伺服系统。
TM 301.2
A
1673-6540(2016)11- 0001- 05
2016-03-22
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
北京航空航天大学学报(2022年6期)2022-07-02
微特电机(2020年11期)2020-12-30
自动化学报(2019年6期)2019-07-23
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
制造技术与机床(2017年3期)2017-06-23
工业设计(2016年6期)2016-04-17
自动化学报(2016年8期)2016-04-16
北京航空航天大学学报(2016年4期)2016-02-27
