
基于滑模观测器的无速度传感器异步电机模型预测控制
2016-12-29 05:49陈宇飞王雨琦刘晓华
电机与控制应用 2016年11期
陈宇飞,王雨琦,陆 可,赵 洋,刘晓华
(1. 日立永济电气设备(西安)有限公司, 陕西 西安 710016;2. 西南交通大学 电气工程学院, 四川 成都 610000)
基于滑模观测器的无速度传感器异步电机模型预测控制
陈宇飞1,王雨琦1,陆 可2,赵 洋2,刘晓华2
(1. 日立永济电气设备(西安)有限公司, 陕西 西安 710016;2. 西南交通大学 电气工程学院, 四川 成都 610000)
模型预测控制是近年来在交流调速领域逐渐受到关注的一种优化控制算法。针对预测控制所需的转速和磁链信息,采用将电机本体输出电流作为参考模型,自适应磁链滑模观测器的输出电流作为可调模型,通过对电流误差设置合适的自适应率,最终辨识出转速。该方案不仅提高了参考模型的精确性,同时将滑模理论应用到磁链观测模型,提高了系统的动态响应和对电机参数的鲁棒性。最后在MATLAB/Simulink环境下搭建了联合仿真模型,仿真结果验证了该方案的可行性。
模型预测控制; 滑模观测器; 无速度传感器; 异步电机
0 引 言
模型预测控制(Model Predictive Control, MPC)是一种经典的最优化控制方法,通过在采样周期内对所有电压矢量的在线评估,选择出满足系统评价指标的最优电压矢量,预测控制的优点是在满足非线性约束条件的同时,可保持较好的动静态性能。MPC本质上是开环最优求解算法,其实时计算量较大,过去受限于微处理器的处理性能,因此在传动领域鲜有实际应用,但随着数字信号处理技术(Digital Signal Processor, DSP)的发展,使得在低成本处理器上实现复杂控制算法成为可能,也就促进了MPC控制策略在电力传动领域的应用研究。与矢量控制方案相比,MPC省去了电流内环和参数整定,且无需脉冲调制。与直接转矩控制方案相比,MPC通过对电机状态的预测,选择出最佳电压矢量,使矢量选择更加准确有效,同时可考虑开关频率降低等非线性约束条件。
在高性能的交流传动系统中,准确的速度反馈是获得磁链信息的前提,而且在MPC系统中,转矩给定值通常由给定转速和实际转速之差经过速度PI得到,但速度传感器的安装降低了传动系统的可靠性,增加了维护成本。因此,无速度传感器技术受到越来越多学者的关注与研究,其中基于滑模理论的速度辨识策略凭借动态响应快、鲁棒性强、完全自适应等优点,一直是无速度传感器技术的研究热点[4-6]。S.Sanwonwanich提出了一种自适应滑模观测器的模型设计,在估算磁链的同时可辨识出转速和定子电阻,与传统观测器相比具有全局稳定的优点;Marco Tursini提出了一种自适应磁链滑模观测器,并通过Liyapunov公式推导出转速自适应率。
本文采用基于转子磁场定向思想的电流预测控制,在发挥模型预测多变量、多约束优势的同时,实现了转矩、磁链和电流的分别控制。该方案省去空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM),简化了系统结构,加快了系统响应速度。其次,在Marco Tursini的基础上,通过仿真调试出最简增益矩阵,并把辨识转速反馈给电流预测控制系统,仿真试验验证了该方案的可行性。
1 异步电机电流预测控制模型
1.1 异步电机离散数学模型
根据异步电机αβ坐标系下的数学模型,可推导出以定子电流和磁链作为状态变量的状态方程:
(1)
其中:
A11=ωrJ-λ(RsLr+RrLs)I
A21=-RsI
A12=λRrI-λLrωrJ
A22=0
B1=λLrI
B2=I
式中:ωr——电机转子角速度; p——微分算子。
三相逆变器输出电压可表示为
(2)
式中:uan、ubn、ucn——逆变器三相输出电压;
Udc——直流母线电压;
Sa、Sb、Sc——逆变器开关状态函数。
Sn=1表示上桥臂导通下桥臂关断,Sn=0表示上桥臂关断下桥臂导通(n=a、b、c)。
将式(2)经过Clarke变换后代入式(1)得到基于开关函数的电流状态方程:
(3)

通常采样时间Ts远小于电机电气时间常数和机械时间常数,电机转速在一个周期内近似不变。用状态变量is的差商代替微分,并采用前向欧拉法近似,得到异步电机离散状态方程:
(4)
1.2 电流预测矢量控制
本文研究的电流预测控制基于异步电机转子磁场定向,根据解耦思想可知,磁链调节器和转矩调节器可获得定子电流的励磁分量ism和转矩分量ist,通过Park变换得到两相静止坐标系下的定子电流分量isα、isβ的指令值,最后通过设计的目标函数来确定最优开关矢量。
为实现较低的电流脉动和快速的跟踪控制,本文采用k+1时刻预测值和指令值的α、β轴分量的误差绝对值之和作为目标函数:
(5)
当采样时间足够短时,k+1时刻的指令值取当前时刻的给定值:
(6)
2 定子磁链滑模观测器
当仅考虑转子角速度误差,不考虑其他参数产生的误差时,根据式(1)可得到基于滑模理论的定子磁链观测器模型,如式(7)和式(8)所示:
(7)
(8)

式中:上标“~”——与转速有关的的参数估计值;
上标“ ^ ”——状态变量观测值;
sgn( )——符号函数;
K1——增量矩阵。
式(7)、式(8)分别减去式(1)可得到滑模观测器的误差函数:

(9)
pe2=-LK1sgn(e1)
(10)

(11)
pe2=LZ
(12)

3 无速度传感器方案
在电流传感器采集准确的前提下,本文以电机本体输出电流作为标准模型,以自适应滑模观测器观测出的电流作为可调模型,利用电流误差构成函数,通过合适的自适应率实时调节可调模型中的待估参数(转速),以达到控制对象输出跟踪标准模型输出的目的。基于滑模观测器的无速度传感器方案如图1所示。
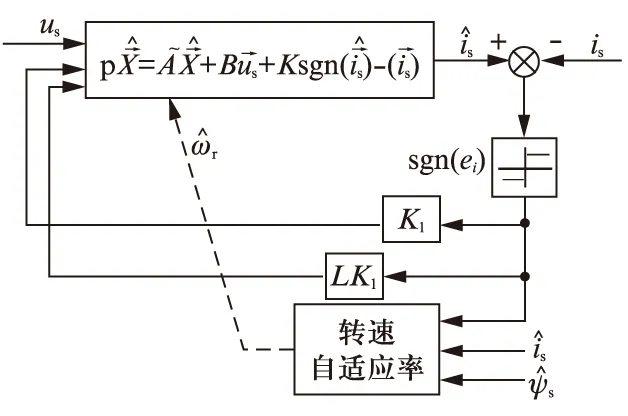
图1 定子磁链滑模观测器模型
根据Lyapunov第二稳定性原理,定义如下函数:
(13)
令:
可得
pω=pω1+pω2
(14)
当pω1<0且pω2=0时,有pω<0,满足Lyapunov稳定性条件。为满足pω1<0,令
LT=-τA12,τ>0
(15)
当pω2=0时,有
(16)
将式(15)代入式(16),并整理得
(17)
式(17)为满足Lyapunov稳定性条件下的转速自适应收敛率。为提高动态性能,采用式(18)所示PI转速自适应收敛率:
(18)
4 仿真试验
为验证基于滑模无速度传感器技术的电流预测控制的正确性与可行性,搭建了基于MATLAB/Simulink的仿真模型,如图2所示。仿真所用异步电机参数如下:PN=4kW,UN=380V,fN=50Hz,Rs=1.55Ω,Rr=1.25Ω,Lls=6mH,Llr=6mH,Lm=172mH,np=2,J=0.5kg·m2,电机空载起动,0.65s时刻突加10N·m负载,起始给定转速100rad/s,0.3s突变为200rad/s,0.5s减小到150rad/s,采样时间设置为1e-4s,仿真时间0.8s。

图2 基于滑模无速度传感器技术的电流预测控制模型
由图3(a)可知,转速辨识结果较准确,但脉动情况比较明显,且误差维持在±1.7rad/s内,原因是滑模理论本质上是一种非线性控制,通过在不同控制之间的切换,使系统达到预期值,故抖动是不可避免的,因此在稳定性方面稍有欠缺,但其动态响应快、鲁棒性强、完全自适应的优点使其具有良好的应用前景。由图3(b)和图3(c)可以看出,定子电流正弦性较好,与指令电流的误差保持在±2A内,通过对比不同采样时间下的仿真结果发现,采样时间越短,电流误差越小。
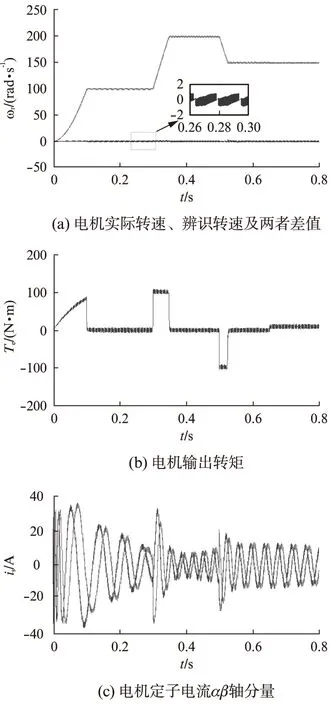

图3 基于无速度传感器技术的电流预测控制仿真结果
为验证电流预测控制在最佳矢量选择方面优于传统的直接转矩控制,基于MATLAB/Simulink仿真平台,搭建了十八边形磁链轨迹直接转矩控制系统。图4和图5分别为两种方案的仿真结果。

图4 十八边形磁链轨迹控制系统仿真结果
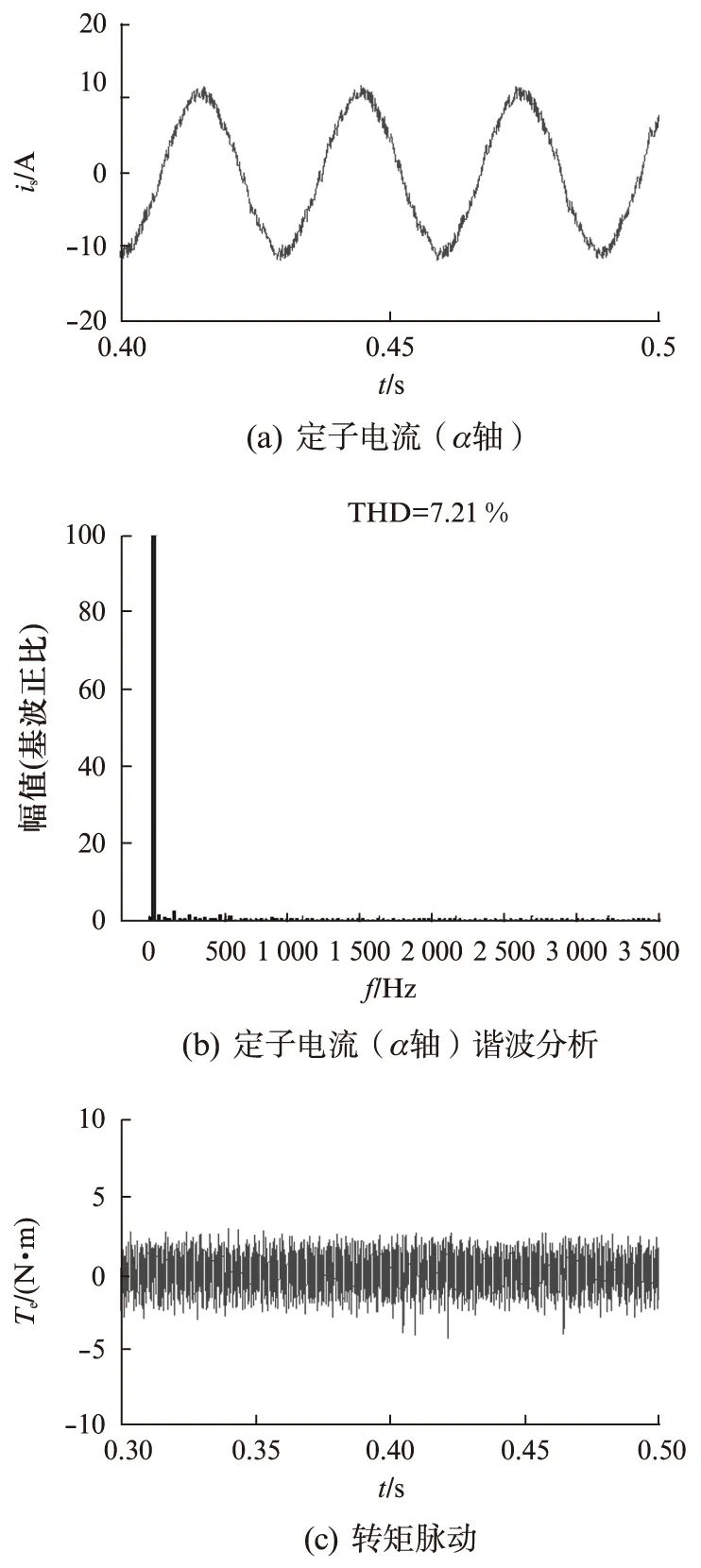
图5 电流预测控制系统仿真结果
对比图4和图5所示仿真结果可知,在电流正弦性、谐波含量和转矩脉动方面,电流预测控制均优于十八边形磁链轨迹直接转矩控制。究其原因,直接转矩控制方案只考虑磁链和转矩的动态性能,仅通过磁链和转矩的滞环选择相应的电压矢量,而电流预测控制在考虑这两个因素的同时,增加了电流正弦的约束条件,所选电压矢量考虑的因素更加全面。但是,这是以降低转矩动态响应为代价换来的,由图5(c)可知,在电流预测控制方案中,转矩的起始动态响应较慢。
5 结 语
本文基于定子磁链滑模观测器推导出转速自适应率,并将该无速度传感器方案应用于电流预测控制系统,试验结果表明:(1) 基于滑模理论的无速度传感器方案转速辨识较为准确,但不可避免的存在高频抖振,对观测器的消抖处理是下一步需要研究的方向;(2) 与传统直接转矩控制相比,电流预测控制在选择最优开关矢量时,不仅满足磁链和转矩响应,还可以满足其他非线性约束条件。
[1]KENNELR,LINDERA.Predictivecontrolofinvertersuppliedelectricaldrives∥ProcofthePowerElectronicsSpecialistsConference, 2000:761-766.
[2] 张亚林.异步电机模型预测电流控制技术研究.武汉:华中科技大学,2012.
[3] 杨耕,陈伯时.交流感应电动机无速度传感器的高动态性能控制方法综述.电气传动, 2001,31(3):3- 8.
[4] SANGWONGWANICH S, DOKI S, YONEMOTO T, et al. Adaptive slidling observers for direct field-oriented control of induction ∥Conference of the IEEE Industrial Electronics Society,1990:915-920.
[5] 高仁璟,李希伟.PMSM无传感器控制的新型滑模观测器设计.电机与控制应用,2014,41(11):7-13.
[6] 李明,程启明,陈根,等.一种新型永磁同步电机滑模观测器设计方法.电机与控制应用,2015,42(6):1-5.
[7] TURSINI M, PETRELLA R, PARASILITI F. Adaptive sliding-mode observer for speed-sensorless control of induction motors. IEEE Transactions on Industry Applications, 2000,36(5):1380-1387.
[8] 冯晓云.电流牵引交流传动及其控制系统.北京:高等教育出版社,2009.
[9] 廖永衡,冯晓云,王珍.基于定子磁链滑模观测器的异步电机空间矢量调制直接转矩控制.中国电机工程学报,2012,32(18):88-97.
Model Predictive Control Besed on Sliding-Mode Observer for Speed Sensorless Asynchronous Motor
CHENYufei1,WANGYuqi1,LUKe2,ZHAOYang2,LIUXiaohua2
(1. Hitachi Yonge Electric Equipment (Xi’an) Co., Ltd., Xi’an 710016, China;2. Electrical Engineering Institute Southwest Jiaotong University, Chengdu 610000, China)
Model predictive control (MPC) as an optimized control algorithm receiving attention gradually. Aiming at the desired parameters of speed and flux in MPC, proposed an adaptive observer which considering the motor current as reference model, and considering the Sliding Mode adaptive flux observer output current as adjustable model, then Lyapunov principle was applied to derive the speed adaptive algorithm. This method not only improved the precision of speed identification, but also ameliorate the dynamic response of system and parameters robustness. Finally, the speed sensor less MPC simulation model in MATLAB/Simulink environment was established, and the simulation results proved the effectiveness of this strategy.
model predictive control(MPC); sliding-mode observer(SMO); speed sersorless; asynchronous motor
陈宇飞(1990—),男,硕士研究生,研究方向为电力电子与电力传动。 王雨琦(1991—),男,硕士研究生,研究方向为电力电子与电力传动。 陆 可(1980—),男,博士研究生,副教授,研究方向为电力电子与电力传动。
TM 301.2
A
1673-6540(2016)11- 0012- 05
2016-05-09
猜你喜欢
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
微特电机(2021年6期)2021-06-22
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2017年6期)2017-11-23
电测与仪表(2016年10期)2016-04-12
铁道科学与工程学报(2015年5期)2015-12-24
