基于移动基准站的舰船系统试验数据处理方法研究
2017-02-09 03:08彭晓刚李景岩
测绘工程 2017年4期
彭晓刚,冯 欣,李景岩
(1.91404部队,河北 秦皇岛 066000;2.66444部队,北京 100042)
基于移动基准站的舰船系统试验数据处理方法研究
彭晓刚1,冯 欣2,李景岩1
(1.91404部队,河北 秦皇岛 066000;2.66444部队,北京 100042)
针对舰船系统试验基准数据处理利用GNSS定位数据通过固定基准站差分解算后再获得相对关系解算的不足,分析该方法面临的难题及难以满足远距离大航区试验的现实问题,提出基于载波相位实时动态差分处理的移动基准站解算方法。在研究GNSS差分定位原理基础上,结合经典载波相位双差方法,通过单历元实时差分,建立无固定基准站的相对数据解算模型。基于采集的实测数据,分析基线解算精度,验证所提出方法在舰船系统试验基准数据处理中的可行性和质量效果。
舰船系统试验;基准数据处理;移动基准站;差分处理
舰船系统试验数据处理主要利用全球导航卫星系统(Global Navigation Satellite System,GNSS)测量数据计算目标平台相对于被试装备的空间几何关系(距离、方位、高度或俯仰等),并把该数据作为检验被试装备性能的基准数据,以判断被试装备所获取数据与基准数据的差异,进而分析被试装备精度参数,以检验、鉴定装备的性能指标[1]。
以往基准数据测量通过架设一个或多个固定基准站加活动站的模式,采用商业差分软件对被试装备架设平台及目标平台接收机原始数据进行处理,先分别获得各平台位置信息(通常是经度、纬度、高度)后,再通过空间模型转换,得到目标相对于被试装备的相对关系。该处理模式存在诸多不足,如:需要基准站观测数据,处理过程相对复杂,动用测控装备多;试验中航路设计、平台布设一定程度上受到基准站架设条件制约;某些地区突发性紧急项目获得固定基准站坐标难度较大;基准站需要布置在陆地、海岛上,远离陆地的动态试验数据处理如果仍旧采用固定基准站,移动站与基准站的距离将会变得很长等等[2-4]。
针对上述不足,本文在分析传统GNSS差分处理技术的基础上,针对舰船系统试验特点,探索建立单历元载波相位动态差分相对定位模型,以实现无基准站的相对数据解算。最后通过实例验证算法的可靠性和有效性,探讨处理精度对试验影响。
1 差分观测模型
试验中,构成解算基线的目标平台与被试平台距离动态变化,因此需要构造不受距离约束且不考虑运动状态的几何观测量[2,5-7]。对原始观测数据进行周跳的探测与修复[6],并对其滤波以消除随机噪声影响;再进行站间和星间双差处理,以消除部分公共误差;建立基于双差模型的观测方程,通过平差,获得模糊度浮点解的精确估计;最后,应用算法搜索整周模糊度的固定解[6-9]。关于周跳探测与修复方法可以参看作者在文献[6]的论述,本文侧重探讨其他相关处理。
以BDS接收机数据为例,在载波相位差分定位中,接收机i观测卫星r的载波相位观测方程为[9-11]
(1)
(2)

进行双差处理[1-2,5],得到
(3)
(4)
2 整周模糊度求解

(5)
式中:A为系数阵;X由bur向量分量组成;N由ΔNi,j向量组成;ε是观测噪声向量。记投影算子为
(6)
式中:I为单位阵;P为观测值权阵;R为载波相位双差残差灵敏度矩阵。
用R左乘以式(5)的两边,令V=Rε(V为残差向量),考虑RA=0,则有
(7)
得模糊度向量的标准差为(n为可视卫星的个数)
(8)
求解正确模糊度的目标函数可变为:VTPV=min。设初始相位残差向量为
(9)
欲使残差向量的值最小,即等价于
(10)
则
(11)
式中:b0为初始相位残差向量,单位为周。在两边左乘以R矩阵,则:
(12)
由于R是幂等阵,且其秩为n-3,经过变换,可得
(13)
式中,R1=[R11R21]T,R11为R的分解,其大小为(n-1)×(n-3),R21为R的分解,其大小为3×(n-3),V1=ΔN1-ΔN1f。由结果结合其他解算处理,即可确定唯一正确的整周模糊度,进而再得到基线解b[6-7,14]。
3 模型验证及结果分析
为了验证算法的精度、正确性,分别进行静态和动态实验,对实际采集数据用上述算法进行解算,并将所得结果与标准值进行比较以验证算法的可靠性。
3.1 静态验证
利用某地CORS站HLD1模拟测试平台,某临时架设测点为目标平台,采用2016-05-02上午的观测数据,并用另一CORS站HLD2数据对临时点差分后的结果解算作为已知值(测试平台和目标平台距离:1 569.767 4 m,方位:244.163 0°,俯仰:0.304 9°),采用上述方法进行处理,得到的基线向量与已知值做差。解算后,模糊度固定解8 430个历元(占89%),浮点解1 015个历元(占10.7%),单点解24个历元(0.3%)。得到解算结果和误差曲线如图1~图4所示。
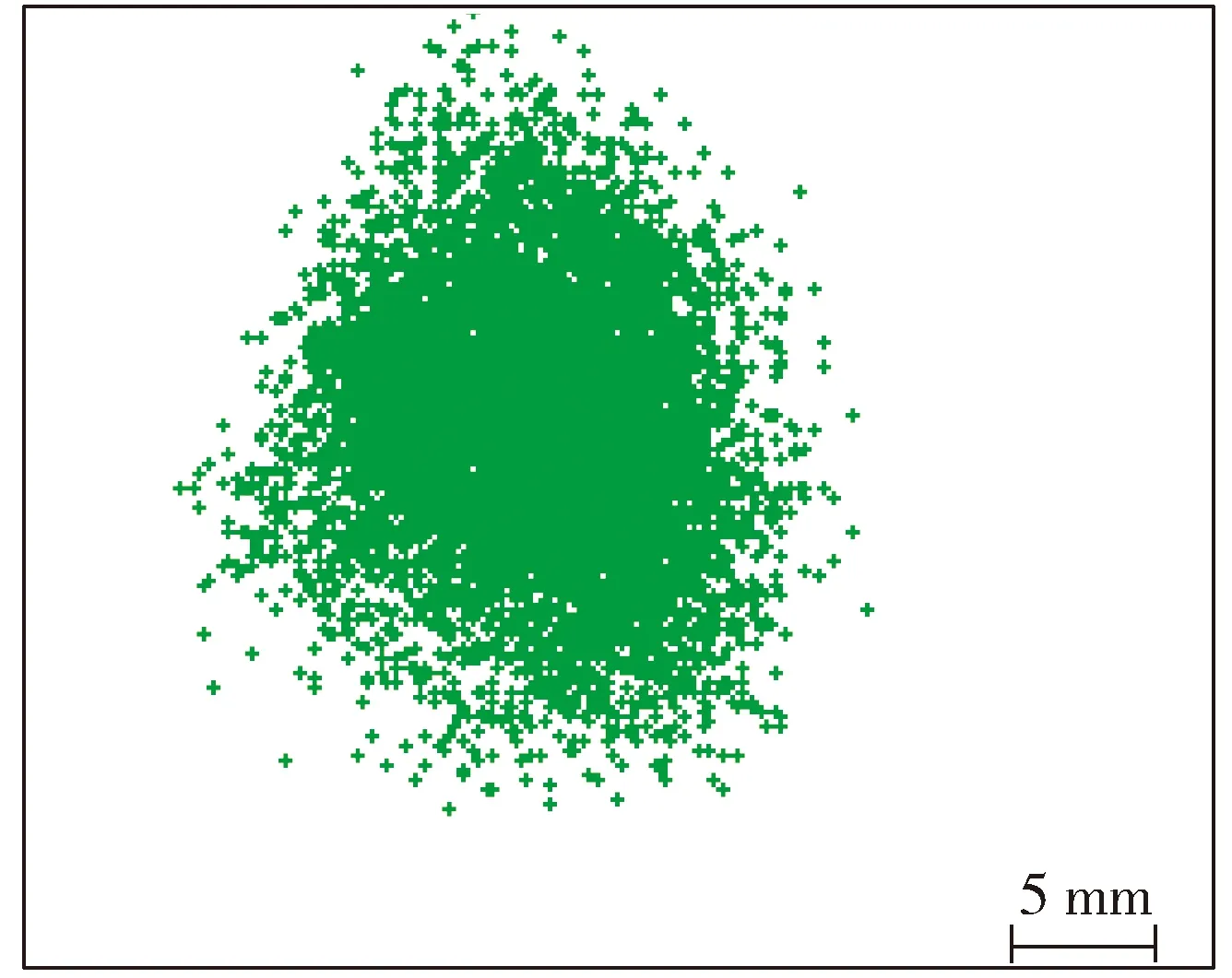
图1 解算结果

图2 解算基线误差分布

图3 解算方位误差分布

图4 解算俯仰误差分布
由结果剔除个别异常数据可知,基线误差在0.2 m附近,方位误差在±0.02°范围内,俯仰误差在±0.03°范围内。
3.2 动态验证
利用2015-10-29上午实际动态试验数据(航路见图5),以某基准站观测数据用商业软件waypoint差分完的结果解算两个船之间的相对关系作为已知值,采用上述方法进行处理,得到的基线向量与已知值做差。解算后,固定解15 305个历元(占57.3%),浮点解11 399个历元(占42.7%)。得到解算结果和误差曲线如图5~图10所示。

图5 实际航路

图6 解算结果

图7 距离变化趋势

图8 距离误差解算结果

图9 方位误差解算结果

图10 俯仰误差解算结果
由结果剔除个别异常数据可知,距离误差在±0.25 m附近,方位误差在±0.01°范围内,俯仰误差在±0.015°范围内。
3.3 结果分析
验证一,由测试环境可知,CORS站架设条件好,周围无遮挡、无干扰,数据接收稳定。所用活动站接收机为动态测量模式,架设的附近有高楼和电线等影响,数据质量不如CORS站设备,解算质量有所下降。
验证二,船上动态试验设备架设环境复杂,周围存在复杂电磁环境,且有甲板、海面、桅杆的多路径信号,导致个别历元解算模糊度不固定。所处理数据与商业差分软件比对发现,在模糊度浮点解算的区间,商业软件也存在浮点解算现象,说明是由于当时测量环境导致数据质量下降造成的。浮点解导致的距离误差基本在1倍波长附近,约20 cm左右,导致的方位误差与基线长度近似成反比,基线越长,方位、俯仰精度相对越高。
舰船系统试验中,一般的高精度警戒探测设备,距离精度在米级,方位精度在0.2°左右,俯仰精度在0.2°左右。由上述验证结果可知,能够满足试验需要。但是,对于更高精度的跟踪、控制设备试验,其精度要求高,上述算法暂不具备该功能,需要进一步深化研究。
4 结束语
在基准数据处理模式上进行探索,提出的方法具有可操作性,能够实现整周模糊度的快速解算,可以准确获取较高精度相对定位信息。通过静态和动态验证分析表明,提出的新方法具有可行性,静态和动态精度较高,验证了算法的正确性和有效性。
算法解算的结果能够满足一定的试验需求,可以节约试验成本,提高处理效率,满足远离陆地的试验环境需要。但在工程应用及对更高精度设备试验方面还需做进一步深化研究。
[1] 彭晓刚.GPS姿态测量及其在海军靶场试验数据处理中的应用研究[D].郑州:信息工程大学,2011.
[2] 刘立龙,鸿雁,唐诗华.基于移动基准站DGPS整周模糊度快速求解的研究[J]. 测绘信息与工程,2007,32(2):12-13.
[3] 段荣,赵修斌,庞春雷,等.一种GPS移动基准站精密相对定位新算法[J]. 四川大学学报(工程科学版), 2015,47(3):130-136.
[4] YANG Yunchun, SHARPE R T, HATCH R R. A Fast Ambiguity Resolution Technique for RTK Embedded Within a GPS Receiver [C]. The 15th International Technical Meeting of Satellite Division of the Institute of Navigation, Portland, Oregon, 2002.
[5] 汪捷,徐冠楠.基于GNSS动态差分相对定位方法的研究与探讨[J].现代导航,2015(3):250-256.
[6] 彭晓刚,李景岩. 北斗系统姿态测量中周跳探测与修复方法[J]. 测绘科学, 2016, 41(9): 29-32.
[7] 任小伟.载波相位差分相对定位的模糊度求解[J]. 导航定位学报,2014,2(1):20-22.
[8] 王艳丽,雷继兆,赵笛. 一种GPS载波相位差分相对定位算法[J]. 计算机测量与控制,2015,23(7):2447-2449.
[9] 刘玥.支持在航载波相位差分定位方法研究[D].哈尔滨:哈尔滨工程大学,2013.
[10] 赵伟,万德均,刘建业,等. GPS载波相位整周模糊度的在航快速算法研究[J].中国惯性技术学报,2004,12(1):33-36.
[11] 冯超,田蔚风,金志华. GPS载波相位双差整周模糊度在航求解[J]. 中国惯性技术学报, 2004,12(5):33-37.
[12] 邹进贵,王海城,隗剑秋. RTK技术在航迹、航速测量中的应用与研究[J]. 测绘信息与工程, 2001(1):4-6.
[13] 唐卫明,邓辰龙,高丽峰.北斗单历元基线解算算法研究及初步结果[J].武汉大学学报(信息科学版),2013,38( 8):897-901.
[14] 刘立龙.动态对动态GPS高精度定位理论及其应用研究[D].武汉:武汉大学,2005.
[责任编辑:张德福]
A data processing method in warship system test based on moving base station
PENG Xiaogang1, FENG Xin2, LI Jingyan1
(1. Troops 91404,Qinhuangdao 066000,China;2.Troops 66444, Beijing 100042,China)
Aiming at the insufficiency of benchmark data processing in warship system test based on fixed base station differential calculation through GNSS positioning data, this paper analyses the difficulty that conventional method is facing with, which can not fit the test of long-range and great navigation area. It proposes the data processing method of carrier phase differential calculation based on moving base station. Based on these analyses of GNSS differential calculation principle, combined with classic carrier phase double-difference, it builds a differential calculation model based on moving base station through real-time single epoch processing. Using the data collected in real-time situation, it gets the baseline calculating precision, and validates the feasibility and result quality in warship system test benchmark data processing.
warship system test; benchmark data processing; moving base station; difference processing
引用著录:彭晓刚,冯欣,李景岩.基于移动基准站的舰船系统试验数据处理方法研究[J].测绘工程,2017,26(4):12-15.
10.19349/j.cnki.issn1006-7949.2017.04.003
2016-07-24
彭晓刚(1978-),男,高级工程师,博士.
P228
A
1006-7949(2017)04-0012-04
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
测绘学报(2022年5期)2022-05-31
心理学报(2022年4期)2022-04-12
水泵技术(2021年3期)2021-08-14
中国惯性技术学报(2020年2期)2020-07-24
现代工业经济和信息化(2016年8期)2016-05-17
西部广播电视(2015年10期)2016-01-18
中国惯性技术学报(2015年1期)2015-12-19