
基于链码的减震器示功图故障检测算法
2017-03-21 12:52刘新平高绍姝
计算机测量与控制 2017年2期
刘新平,吴 婷,高绍姝
(中国石油大学(华东) 计算机与通信工程学院,山东 青岛 266580)
基于链码的减震器示功图故障检测算法
刘新平,吴 婷,高绍姝
(中国石油大学(华东) 计算机与通信工程学院,山东 青岛 266580)
减震器示功图是测量减震器外特性的重要手段,快速准确的识别减震器故障类型对降低减震器的次品率和改善减震器的设计缺陷具有重要意义;为此,提出了基于链码的多特征模式匹配算法对故障示功图进行分类;首先,对示功图进行预处理并记录最大拉伸阻尼力和最大压缩阻尼力的值,对预处理后的示功图进行十字分割,分别求出分割后的示功图各部分的链码序列,然后求出其对称性、链码长度、面积这三个特征值,最后根据编码原则对特征参数进行编码,将其编码后的值与类型库的编码进行匹配,从而得出样本的故障类型;实验结果表明,该算法能够正确识别示功图的13类基本故障类型。
链码;对称性;故障诊断;特征提取
0 引言
减震器是汽车悬架系统的主要部件,对汽车的整体性能有重要的影响,而随着人类社会的发展,人们对汽车舒适性的要求也越来越高,从而对减震器的生产及测试提出了更高的要求。减震器性能的好坏主要通过减震器示功图即减震器外特性曲线来进行判断,在实际应用中对于减震器示功图的判断主要由人工专家负责,而学术界对于减震器缺陷识别的研究较少。
在抽油机示功图分类方面,吴晓东[1]等人提出了基于BP神经网络的示功图分类方法,之后徐芃[2]等人将BP神经网络与自组织竞争神经网络对示功图的识别率进行了比较,得出了自组织竞争神经网络模型在示功图检测的平均正确识别率及结构性能方面优于BP神经网络的结论。但由于减震器示功图样本数量的限制,使得神经网络无法得到足够的训练样本,从而导致了神经网络模型的分类准确率较低。檀朝东[3]等人提出了基于最小二乘法的抽油机示功图分类方法,该方法从计算两个示功图的最小二乘相似度的角度出发,通过设定判断分类的阈值来决定两个示功图是否属于同一类型,但判断分类阈值的设定大大影响了分类的准确率,且由于最小二乘法的自身局限性决定了该方法无法准确的对减震器进行分类。
借鉴抽油机示功图的凡尔开闭点的原理及减震器工作原理[4]对示功图进行分割,分割的四点由最大最小位移点及其垂直平分线与示功图的交点来确定[5]。并且每种故障都有自己对应于示功图上的变化,因此采用参数化的几何特点来对减震器示功图进行分类。实验表明,该方法可正确分类出13类减震器故障类型。
1 基于链码表示的示功图
链码是一种能够保留图像轮廓的方向、角度及轮廓长度等细节信息的编码方法。常用的链码编码方式有4-方向链码和8-方向链码两种,后者较前者在基于像素的图像中更为精确。采用Freeman于1961年提出的D8FCC(8-direction Freeman chain code)来对示功图曲线进行编码,其链码方向用0~7来表示,如图1所示。

图1 传统IPC插图
根据示功图的特点及后续算法的需要,采用固定起始点的顺时针8方向链码对整个示功图曲线进行编码。固定的起始点就设在压缩行程中最大位移处,即示功图曲线与横轴最左侧的交点。
图2给出了基于上述编码方式编码后的简化示功图。其中,三角形标记的点为链码的固定起始点,圆形标记的点为四部分曲线的分界点,1、2、3、4分别表示示功图被标记点分成的四个部分,记为Di(i∈{1,2,3,4}),四段链码的起点分别为Ci(i∈{1,2,3,4}),各部分链码序列,记为Fi(i∈{1,2,3,4}),Fi分别为:
F1:2111110000;F2:0000777776;
F3:4444333332;F4:6555554444
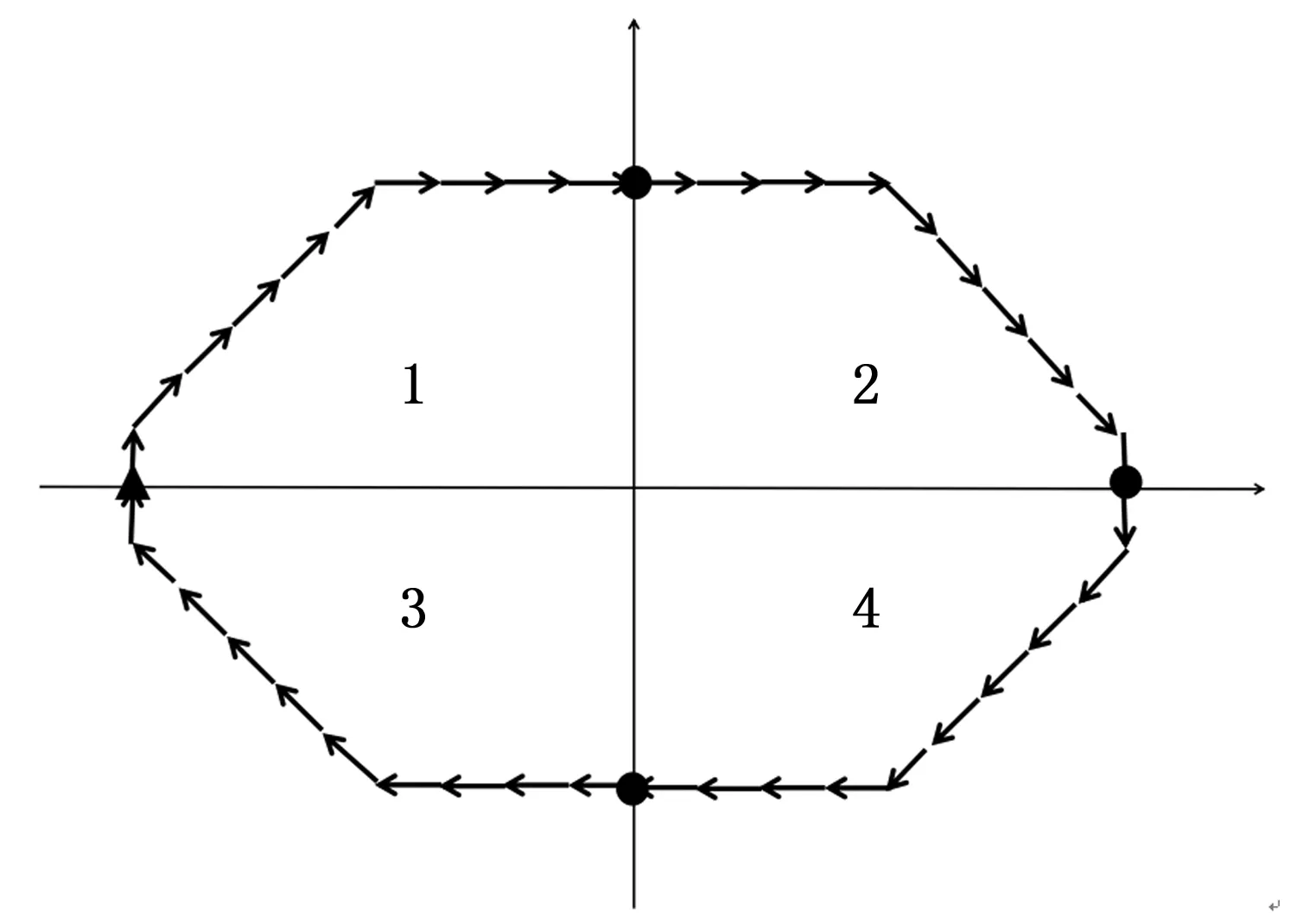
图2 简化示功图及八方向链码
2 特征提取
2.1 对称性特征
2.1.1 关于中心对称
两条曲线关于中心对称就是指其中一条曲线绕原点旋转180°后与另一曲线完全重合。而链码本身最大的优点就是能够完全保留曲线的角度信息,由图1可以得出两个关于原点对称的链码存在以下关系:
(1)
式中,l,l′为链码值,即当链码差值为4时,两点关于中心对称。由(1)式可知,要判断两条曲线是否关于中心对称,只要看着两条曲线的链码序列的差的绝对值是否为4。图2中:
|F1-F4|=|2111110000-6555554444|=4444444444
(2)
|F2-F3|=|0000777776-4444333332|=4444444444
(3)
2.1.2 关于Y轴对称
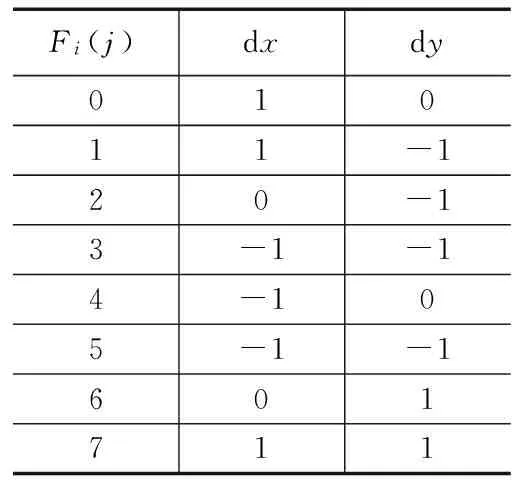
关于Y轴对称相当于以Y轴为轴线对折,左右两边完全重合。由于链码序列是以8连通码为基准确认的,所以对链码序列做Y轴对称即对原8连通码做Y轴对称变化,对称过程及结果如图3所示。由图3得出链码对应变换关系如表1所示。
j为第i部分链码序列的索引值。以D1为例,其经过变换函数变换后的链码序列如图4所示。


图3 原8方向链码做Y轴对称
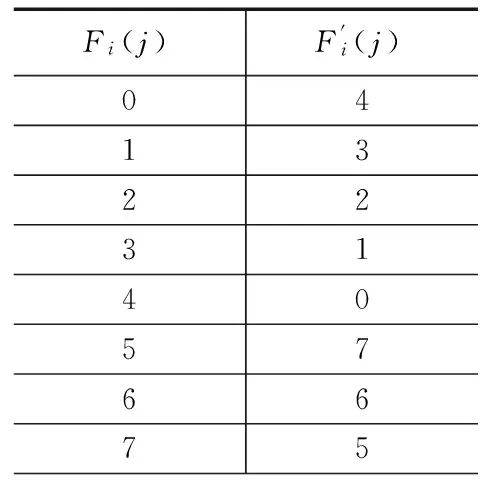
Fi(j)F'i(j)0413223140576675
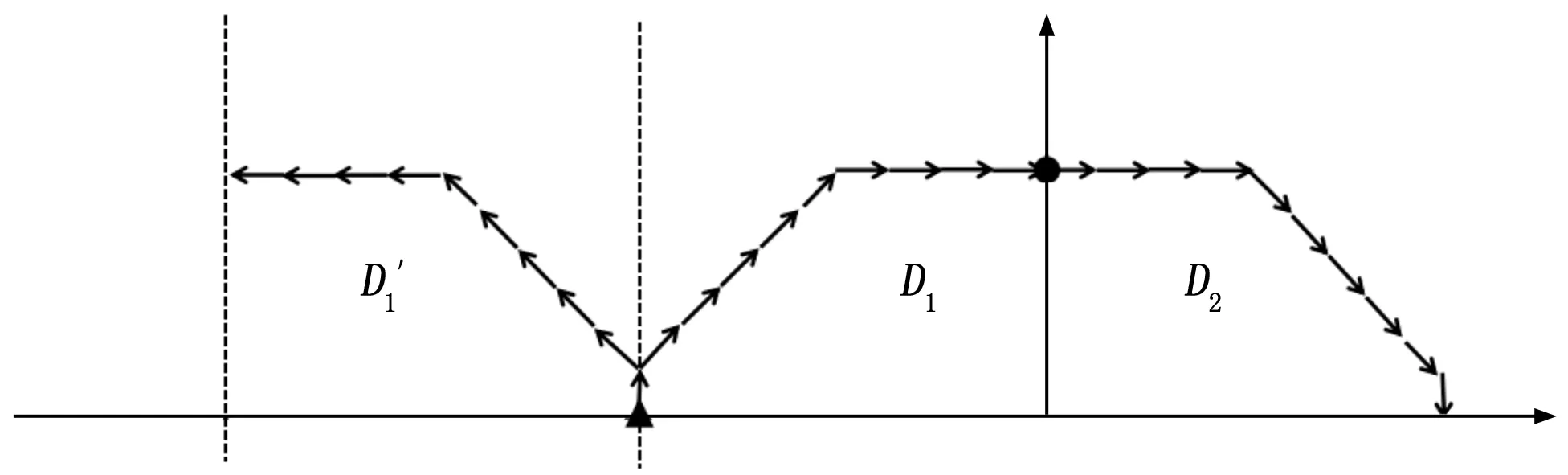
图4 变换过程示意
综上所述,判断一部分是否与另一部分关于Y轴对称的基本步骤如下:
1)读入需要判断是否关于Y轴对称的两部分链码序列,分别记为Fi和Fi′,选定其中一部分的链码序列Fi进行如下操作;

4)将F″i和Fi′对应位置逐一做差,若其对应位置的差的绝对值均为4,则Fi和Fi′关于Y轴对称,否则不成立。
2.1.3 关于X轴对称
由图5可以得出关于X轴对称的链码变换关系如表2所示。
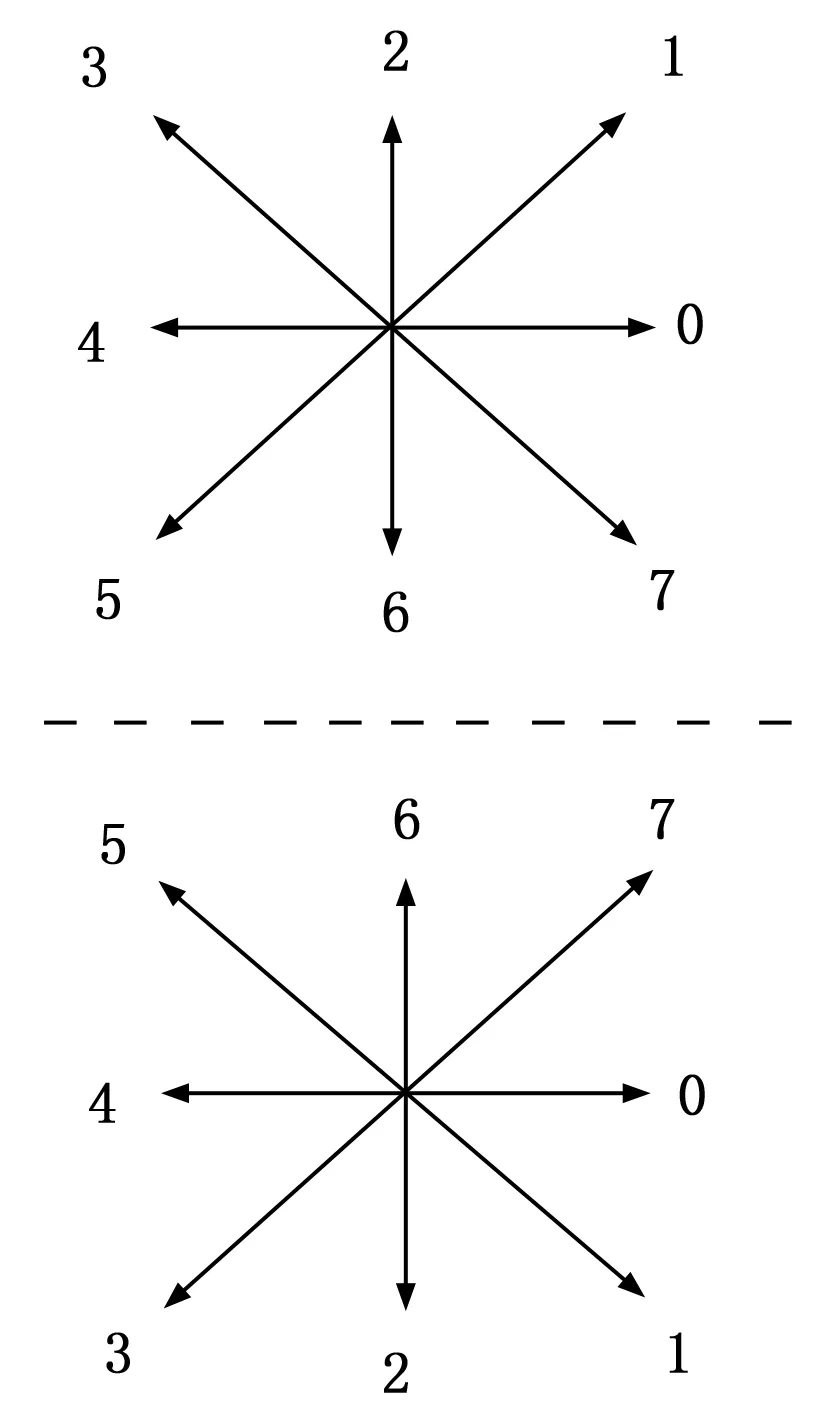
图5 原8连通码做X轴对称
表2 做X轴对称的链码对应关系
算法步骤与1.2.2所述基本一致,只将变换函数换成fX(j)即可。
2.2 曲线长度特征

(6)
其中:m为码值为0、2、4、6的链码数,n为码值为1、3、5、7的链码数,Li为第i部分曲线长度。
2.3 面积特征
由于四部分面积是示功图曲线与坐标轴围成的面积,所以采用积分的方式[7]来计算各部分曲线与坐标轴围成的面积。
图6为第一部分面积示意图, 图中浅灰色加上边界深灰色部分为第一部分面积总和。基于8连通码的区域面积计算公式如下所示:

图6 Di面积图示
(7)
其中:j为从起点Ci开始的第j个点(链码),Xj、Yj为第j个点的横坐标和纵坐标值,Y0为起点Ci的纵坐标的值,dx(Xj)、dy(Yj)为横纵坐标的偏移量。已知链码起点坐标和链码序列,可以根据表3中的链码值与坐标偏移量的对应关系求出整个边界点坐标序列。
Fi(j)为链码序列中第j个链码值,所以(7)式可简化为:
(8)
3 特征参数编码方式
借助故障情况下示功图的各特征参数与正常情况下示功图各特征参数的大小关系来区分各故障类型,这种以大小关系代替具体数值的分类方法可以大大减小分类算法的复杂程度。因此,采用对上述故障样本各特征参数的大小关系进行编码的方法,把测试样本的编码值与类型库的编码值进行匹配,从而得到测试样本的故障类型。
各特征参数的编码规则:
1)对称性关系:用4位二进制数编码,从左往右分别对应1、2、3、4四部分,存在对称关系的那一位置1,若存在两组对称关系,则置D1及与其对称的部分为1,其余为0,全都对称记为1111。
2)曲线长度:以6位二进制数编码,前三位表示四部分中链码长度小于正常示功图链码长度的个数,后三位表示大于正常链码长度的个数。
3)面积:同样以6位二进制数编码,前三位表示比正常示功图面积小的个数,后三位表示比正常面积值大的个数。
4)最大拉伸/压缩阻尼力:以2位二进制数编码,10表示大于正常值,01表示小于正常值,11表示远大于/小于正常值,00表示与正常值相等。
根据上述编码规则对类型库的样本进行编码,结果如表4所示。

表4 类型库的样本编码值
4 实验结果及分析
实验以MTS公司的4KEMA可移动式减震器特性实验台系统在1.048m/s速度下的测试数据为实验对象,其中正常情况下的示功图如图7所示。
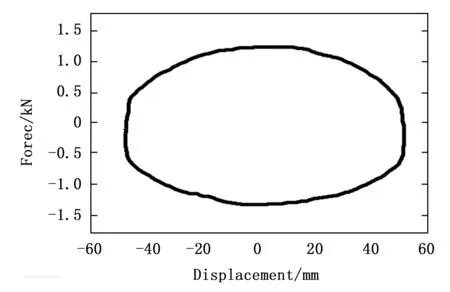
图7 正常情况下示功图
通过上述方法分别分析了正常情况下示功图的各特征参数,四部分依次分别为231、232、219、220个像素点组成的曲线。正常情况下各特征参数的具体值与编码结果如表5所示。

表5 正常情况特征参数表
从同一型号减震器测试结果中选取如图8所示的减震器示功图作为测试样本。
在正常工况及表4所示的4类典型故障测试样本组中各选一例,如图8 所示。实验中,对测试样本进行链码表示、特征提取、编码匹配及实验结果分析。本测试实验结果表明,基于链码的示功图故障检测算法在这13类故障的检测准确率方面表现良好,但在多种故障类型同时出现时,该算法无法达到单故障检测的准确率。因此,下一步工作将研究加入更多故障类型,如多类型混合故障等,并且研究减小等距离链码编码及基于像素的图像表示导致的局部对称性检测误差的方法,从而进一步完善分类算法。
5 结论
采用基于链码的表示的示功图代替原图,然后通过提取示功图对称性、曲线长度、面积等特征信息的方法,对示功图进行特征提取,通过对理想故障示功图的分析,提出了基于编码的模式匹配方法来实现示功图的分类。一方面解决了神经网络分类的数据量不够的问题,另一方面又避免了最小二乘法的判断阈值对分类准确性的影响。
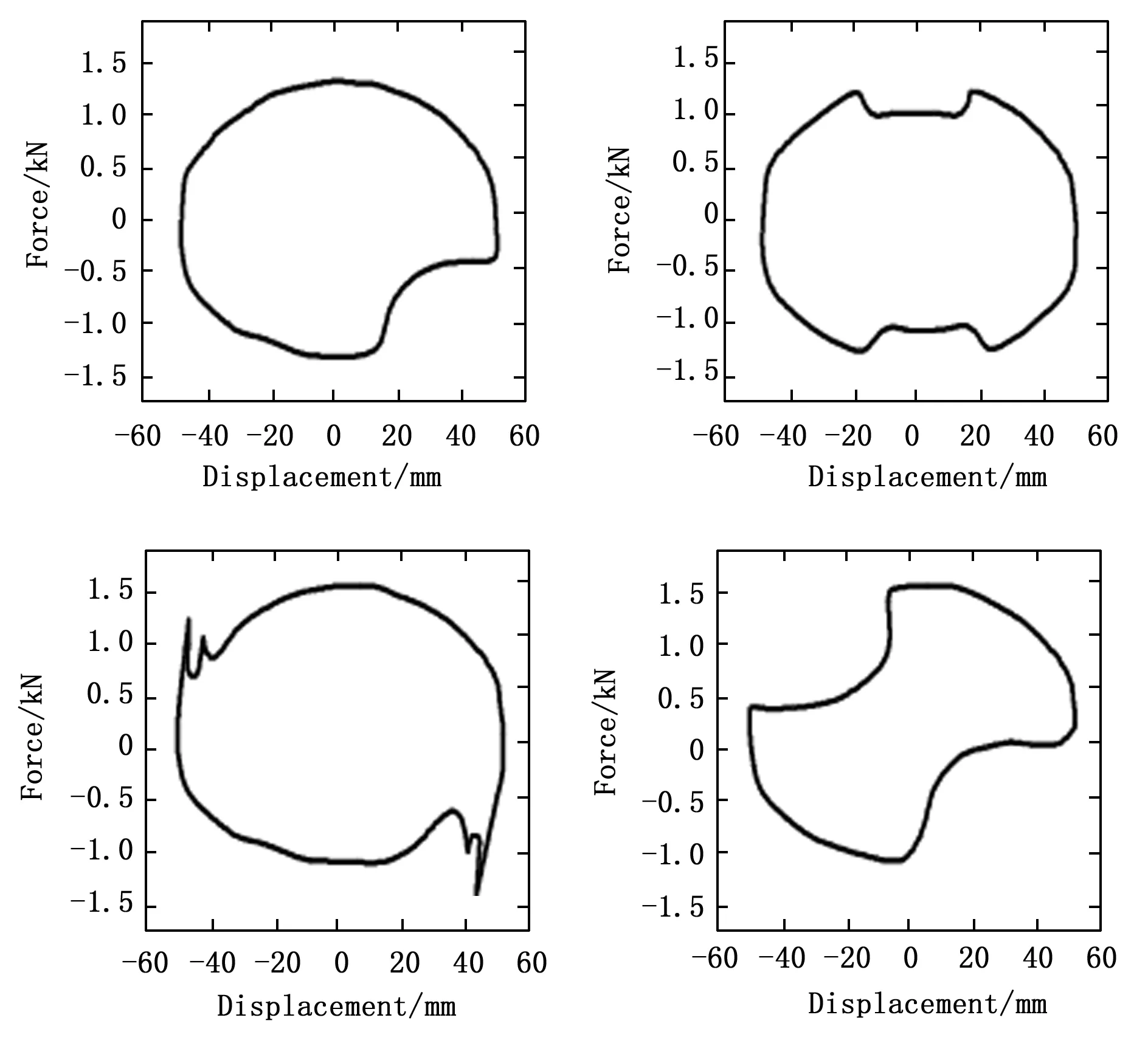
图8 测试样本
[1]吴晓东, 蒋 华, 韩国庆. 神经网络在示功图类型识别中的应用(英文)[J].PetroleumScience, 2004, 1(1):27-30.
[2] 徐 芃, 徐士进, 尹宏伟. 有杆抽油系统故障诊断的人工神经网络方法[J].石油学报, 2006, 27(2):107-110.
[3] 檀朝东, 曾霞光, 檀革勤,等. 基于最小二乘法的抽油机井示功图自动分类及故障诊断[J].数据采集与处理, 2010(S1).
[4]ZhongjieLi,LeiZuo,Luhrs,G,etal.ElectromagneticEnergy-HarvestingShockAbsorbers:Design,Modeling,andRoadTests[J].IEEETransactionsonVehicularTechnology, 2013, 62(3):1065-1074.
[5]LiK,GaoXW,YangWB,etal.Multiplefaultdiagnosisofdown-holeconditionsofsucker-rodpumpingwellsbasedonFreemanchaincodeandDCA[J].PetroleumScience, 2013, 10(3):347-360.
[6] 万永菁, 张 佩. 一种基于链码检测技术的纤维长度计算方法研究[J]. 微计算机信息,2012(10).
[7] 杨万扣, 任明武, 杨静宇. 数字图像中基于链码的目标面积计算方法[J]. 计算机工程, 2008, 34(1):30-33.
Fault Detection Algorithm of Shock Absorber Indicator Diagram Based on Chain Code
Liu Xinping,Wu Ting,Gao Shaoshu
(School of computer and communication engineering, China University of Petroleum (Hua Dong),Qingdao 266580,China)
Shock absorber indicator diagram is an important means to measure the external characteristics of the shock absorber, fast and accurately identify the type of shock absorber failure is important to reduce the rate of defective shock absorbers and flaws caused by design. In this paper, a multi-feature pattern matching algorithm based on chain code is proposed to classify the fault diagram. First, the indicator diagram of pretreatment and record the maximum tensile damping force and maximum compression damping force value. For the pretreatment of the indicator diagram of cross cutting, respectively, and calculated the segmentation shown in diagram of each part of the chain code sequence and then calculated its symmetry, chain code length, area of the three eigenvalues. Finally according to the encoding principle of characteristic parameters of coding, the encoded value with the type library code to match, so that the fault type of the sample. Experimental results show that the proposed algorithm can correctly identify the 13 types of basic fault types of the indicator diagram.
Freeman chain code; symmetry; fault detection; feature extraction
2016-04-07;
2016-06-21。
山东省自然科学基金(ZR2014FP013);青岛市应用基础研究计划项目(grant14-2-4-115-jch)。
刘新平(1966-),男,山东省金乡县人,副教授,博士,主要从事嵌入式系统、智能交通等方面的研究。
1671-4598(2017)02-0043-04DOI:10.16526/j.cnki.11-4762/tp
TP
A
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
杭州电子科技大学学报(自然科学版)(2020年6期)2020-12-03
语数外学习·初中版(2020年10期)2020-09-10
安徽工程大学学报(2020年1期)2020-04-14
汽车实用技术(2019年5期)2019-03-22
中学生数理化·八年级数学人教版(2017年1期)2017-03-25
电子技术与软件工程(2016年22期)2016-12-26
初中生世界·八年级(2016年10期)2016-09-10
科技视界(2014年7期)2014-08-15
人民交通(2012年6期)2012-10-26
