
全自动驾驶车辆段总体布局方案设计
2017-06-21 15:05郭泽阔
都市快轨交通 2017年2期
郭泽阔
(北京城建设计发展集团股份有限公司,北京100037)
全自动驾驶车辆段总体布局方案设计
郭泽阔
(北京城建设计发展集团股份有限公司,北京100037)
从全自动驾驶车辆段典型的运营场景入手,分析倒装与顺装方案对全自动驾驶车辆段的影响,总结出全自动驾驶模式下车辆段的特点,结合运营场景提出总体布局的设计思路。如在车辆段新增全自动运行区域,由信号系统实现列车的全自动驾驶功能;行车综合自动化系统增加与车辆段通信、信号、视频监控、火灾报警等系统接口,实现各系统的联动等。分析表明,全自动驾驶车辆由于其自动运行区和非自动运行区的划分,以及转换轨位置的不同,与传统车辆段总体布置有着较大的不同,在设计全自动驾驶车辆段总体布局时要充分考虑自动运行区的划分和车辆调车方式的不同,以及开通初期人工驾驶模式到全自动驾驶模式的平滑过渡。
城市轨道交通;全自动驾驶;车辆段设计;运营场景;总体布局方案
1 研究背景
根据国际电工协会标准“铁路应用——城市轨道交通管理与控制系统”IEC 62290—1中的描述,将城市轨道交通自动化等级分为GOA 0—GOA 4共5个等级。全自动驾驶系统(fully automatic operation,FAO)是基于现代计算机、通信、控制和系统集成等技术实现列车运行全过程自动化的新一代城市轨道交通系统,是城市轨道交通自动化等级最高的系统[12]。在过去的50年,全自动驾驶技术从低密度低客流线路应用逐级发展到大客流高密度线路应用。目前为止,全球已有34座城市、50条线路、732座车站、773 km的线路应用全自动驾驶。据国际公共交通协会(UITP)估计,未来全球新建城市轨道交通线路75%计划采用全自动驾驶技术,既有轨道交通40%线路拟改建为全自动驾驶线路[3 4]。
随着全自动驾驶应用的逐渐成熟,国内上海地铁10号线、北京地铁燕房线等线路也尝试采用全自动驾驶技术建设,据了解,国内其他城市如宁波、广州等地也有采用全自动驾驶技术的意向。可以预测,在未来的10~20年内,全自动驾驶技术在中国的轨道交通领域将会占有很大的份额。所以,尽早地全面掌握全自动驾驶的关键技术,对提高我国轨道交通产业技术水平,建设自主化的全自动驾驶线路有着重要意义。
目前,国内很多科研机构或地铁建设单位都在组织开展关于全自动驾驶关键技术的研究,各设计院在制定全自动驾驶相关的设计标准。关于全自动驾驶车辆、调度系统、综合自动化等方面的论文也在国内期刊相继刊发[511],但关于全自动驾驶车辆段设计的论文或研究还未报道过。
笔者结合多年来传统地铁车辆段的设计经验,以及参与燕房线全自动驾驶车辆段的设计审查工作的积累,结合与北京建管公司联合申请的多个全自动驾驶关键技术研究科研项目成果,对在全自动驾驶模式下车辆段总体布局方案设计提出了自己的想法,希望能起到抛砖引玉的作用。
2 全自动驾驶应用的意义与发展
FAO可实现无人驾驶(unattended train operation,UTO),但对FAO的关注点并非“无人”,而是提升系统的安全和效率。城市轨道交通的运行最早由司机目视驾驶,安全性完全取决于司机,列车运行效率较低。后来,列车自动防护(ATP)系统的出现,可防止列车碰撞,提升了运行安全性。随着基于无线通信的列车控制(CBTC)系统的出现,列车在实现自动运行(ATO)的同时进一步提升运营效率,司机的工作主要是控制列车车门开闭、列车启动、降级模式下的处理和车内广播。为进一步提升系统安全性和效率,列车车门开闭、紧急情况处理皆由系统自动控制实现,对系统自动化水平及可靠性、可用性、可维护性、安全性(RAMS)指标提出了更高要求,在此背景下,FAO应运而生。
应用全自动驾驶后的车辆段与常规驾驶车辆段存在较大区别,主要原因是车辆段内停车列检、洗车、试车线等区域采用和正线完全相同的信号系统,导致车辆段内的调车模式、安全隔离措施等都发生相应的变化。那么车辆段设计如何应对这些变化呢?本文将从车辆段典型应用场景分析入手,对车辆段内的车辆运用、整备、检修各流程应用场景及运营规则进行分析,提出全自动驾驶车辆段的特点,从而总结出全自动驾驶车辆段总体布局方案设计要素。
3 与常规车辆段的区别
结合全自动驾驶车辆段运营场景的修程,全自动驾驶车辆段需要分为全自动运行区和非全自动运行区,与传统驾驶车辆段相比,主要存在以下特点。
3.1 新增功能
1)车辆段新增全自动运行区域,由信号系统实现列车的全自动驾驶功能。全自动运行区域列车能以自动运行方式运行。整个车辆段纳入中央ATS自动列车监控系统,车辆段设车站级ATS工作站。正线服务的列车自“唤醒”至“休眠”应全部纳入ATS时刻表管理与控制。
2)新增全自动运行区域与非全自动运行区域的隔离设施,并增设门禁系统。车辆段应对全自动运行区域和非全自动运行区域进行严格分区,区域间采用围栏、建筑物或其他设施隔离。在必要的通道处设置门禁,人员及车辆通过门禁进入全自动运行区域时,必须得到控制中心授权。
3)新增全自动运行区域门禁与信号、行车自动化、供电的联锁功能。为方便管理,停车列检库设置若干防护区,工作人员必须通过库内横向地沟才可进入防护区。从地沟通往该区域的出口设置门禁,当人员需要进入区域时,必须先取得行车调度和电力调度的许可才能进入。
4)新增全自动运行区域若干防护区域的划分,并增设通往各防护区域的地下通道。停车列检库应设在全自动驾驶区域内,列检线设置检查坑。为方便管理,停车列检库应设置若干防护区。
5)新增列车清洗机与信号系统的接口,实现全自动洗车功能。
6)新增试车线全自动无人驾驶测试,包括列车休眠、唤醒、对外停车、自动开门关门、列车自动换端等。
7)新增全自动运行区车库内照明远程控制功能及牵引供电的远程控制。
3.2 增强功能
增强全自动运行区域火灾报警系统、广播系统、视频监控系统功能,并增加各系统的联动功能。
全自动运行区域车库大门增强为自动门,增加根据行车进路自动开闭功能。
3.3 变化接口
1)增加供电系统与门禁系统的接口。停车列检库隔离开关与进入停车列位的门禁硬线连接,当隔离开关闭合时(供电),门禁被锁定,无法打开;当隔离开关断开时(断电),门禁才允许打开。
2)通信系统在车辆段全自动运行区域设置的广播及视频监控系统,增加与信号系统、火灾报警系统、门禁系统的接口,实现各系统的联动。
3)信号系统增加与列车自动洗车机、门禁系统、机电系统的接口。
4)行车综合自动化系统增加与车辆段通信、信号、视频监控、火灾报警等系统的接口,实现各系统的联动。行车综合自动化系统增加与全自动运行区域动力照明、供电系统的接口,实现控制中心通过BAS远程对全自动运行区域停车库照明、供电、断电的分区域控制。
4 典型应用场景
全自动驾驶系统指的是完全没有司机参与,车辆在控制中心的统一控制下实现全自动安全运营。全自动驾驶的核心理念是通过设备的逻辑联锁与冗余控制,保障运营系统中车辆与乘客的安全。
在全自动驾驶车辆段内,分为全自动运行区和非全自动运行区。在全自动运行区内,车辆可实现列车自动休眠、唤醒、准备、自检、运行、停车、洗车等操作。车辆由自动运行区进入非自动运行区需要通过专用的转换轨来切换信号模式,由自动驾驶模式转换为人工驾驶模式。车辆在全自动运行区到非自动运行区检修作业需要有完善的安全管控系统来保障安全。本文以车辆从正线回段到月检库检修为例,对典型的全自动驾驶应用场景描述如下:
1)车辆维修调从调度中心获取车辆进库检修(月检)计划,工作流程处于列车进库阶段,并通知调车司机到转换轨相应位置待命。
2)车辆维修调后台通过信号、车辆、调度等其他系统接口,获取列车进入车辆段信息,经过自身联锁逻辑判断,通过网络向门禁联锁控制装置发出命令,自动运行区与非自动运行区间壁门自动打开。
3)列车由调度中心控制,自动驶入转换轨;调车司机靠近列车,请求调度中心打开车门。
4)调度司机进入列车,并按下检修按钮,列车司机室激活,车辆进入人工驾驶模式,由调车司机驾驶列车驶入月检库,调车司机下车,自动运行区与非自动运行区间壁门自动关闭。
5)检修人员在安全防误系统后台编制工作票及操作票,从防误系统后台进入停电阶段。系统后台通过网络向隔离刀闸监控装置发出遥控分闸命令,断开隔离刀闸,实现接触网停电。
6)接触网停电后,接触网远程接地装置自动检测接触网电压,验明无电后,通过网络向防误系统后台发送接触网无电信息。
7)防误系统后台确认无电后,经过联锁逻辑判断,允许接地。防误系统后台通过网络自动向接触网远程接地装置发送远程接地命令,接触网远程接地装置接到命令后动作,实现接触网远程自动接地。
8)防误系统后台通过网络采集到接触网已处于接地状态后,通过网络向门禁联锁控制装置发出检修平台作业门打开命令,检修平台作业门打开,允许检修人员进入检修平台作业。
9)视频监视装置发现检修人员进入检修平台后,通过网络向防误系统后台发送视频信息。防误系统后台经过判断,进入检修模式,自动控制视频监视装置对检修过程人员及设备进行视频监护。
10)检修结束,检修人员返回,防误系统后台进行送电前检查。防误系统后台确认人员全部撤离后,后台通过门禁联锁控制装置闭锁检修作业门,进入送电模式,准备送电。
11)防误系统后台控制接触网远程接地装置,实现接触网接地自动拆除。系统后台通过采集信号,确认接触网接地确已拆除后,通过网络向隔离刀闸监控装置发出遥控合闸命令,实现接触网送电。
12)接触网送电成功后,防误系统后台经过联锁逻辑判断,通过网络向门禁联锁控制装置发出命令,自动运行区与非自动运行区间壁门自动打开。
13)调车司机将列车开到转换轨指定位置,并将检修开关拨到非检修位,调车司机下车,列车进入自动驾驶模式,由调度中心唤醒列车,并自动驾驶进入停车场库,整个月检过程场景完毕。
整个“列车进库—接触网停电—车辆检修—接触网送电—列车出库”的全自动驾驶列车进出库场景,如图1所示。
5 总体布局方案
5.1 国内外经验借鉴
常规驾驶车辆段的布局一般按顺装布置,以实现检修调车工艺的顺畅。在全自动驾驶时,车辆段分为全自动运行区域和非全自动运行区域。全自动运行区域与非全自动运行区域间设置信号转换轨,凡是由全自动运行区域运行至非全自动运行区域的列车,均需进入信号转换轨进行信号转换,列车由无人驾驶进入有人驾驶模式。
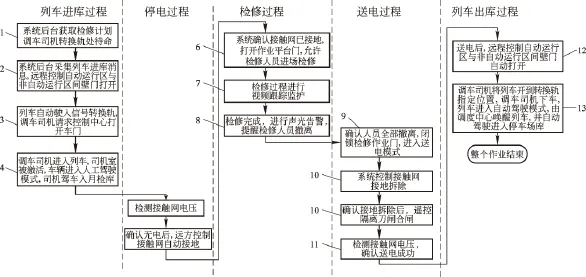
图1 全自动驾驶列车进出库场景Fig.1 The scene graph of FAO train driving in&out of depot
由于倒装布置方案分解了咽喉区,可有效利用占地面积,需对全自动驾驶模式下倒装方案与顺装方案的调车工艺进行对比分析,以充分认识全自动驾驶车辆段的布局特点并发挥全自动驾驶列车的优点。为此,首先对国外几个具备全自动驾驶线路的典型车辆段进行调研,如图2所示。
由图可见,全自动驾驶车辆段采用倒装方案在国内外应用比较常见。尤其值得注意的是,图2(c)为迪拜地铁红线Rashidiya全自动驾驶车辆段,此线路全长52.1 km,为目前线路最长的全自动驾驶线路,于2011年建成通车,最高运行速度为110 km/h,该地块明显具备并列顺装布置条件,但仍采用了倒装布置。
5.2 顺装、倒装调车工艺
5.2.1 顺装方案列车调车工艺
以北京新机场线磁各庄车辆段的总图布局为例(见图3),对全自动驾驶车辆布局进行分析。在车辆段调车中,出现次数最频繁的是列车进行月检工作时,在月检线和停车列检线之间的调车。月检线为非全自动驾驶区,停车列检线为全自动驾驶区。
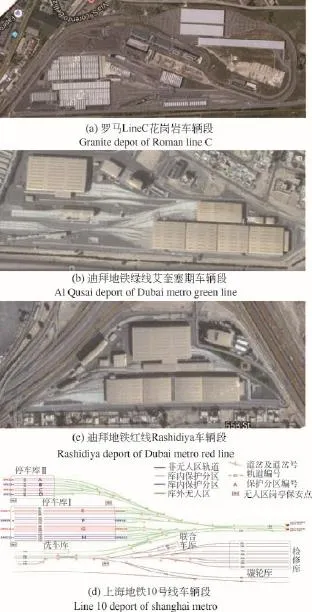
图2 国内外全自动驾驶车辆段布局案例Fig.2 The cases of fully automatic operation depot layout at home and abroad
如图3所示,若是传统人工驾驶,列车由正线驶入月检库直接入库,无需换向;但是,在全自动驾驶模式下,由正线(全自动运行区)运行至月检库(非全自动驾驶区)必须经过段内信号转换轨,段内信号转换轨一般兼作段内牵出线,因此列车需先进入停车列检库,再由停车列检库运行至信号转换轨,最后由信号转换轨运行至月检库。上述调车过程列车一共经过2次换向,1次运行模式切换。
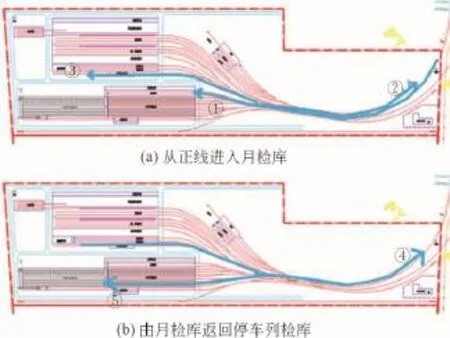
图3 全自动驾驶车辆段顺装方案调车工艺Fig.3 The analysis diagram of shunting process in consequent arrangement for fully automatic operation depot
出库过程完全相反,一般月检结束列车会返回至停车列检库。此时,列车需先经过信号转换轨,后运行至停车列检库,共经过1次换向,1次运行模式切换。
5.2.2 倒装方案列车调车工艺
如图4所示,列车进入月检库时,可直接由正线运行至信号转换轨,再进入月检库。整个调车过程,仅需1次换向,1次信号转换。
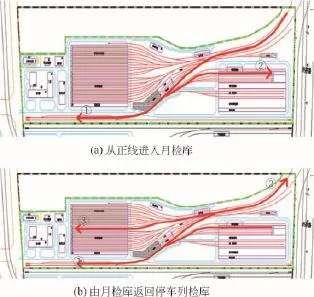
图4 全自动驾驶车辆段倒装方案调车工艺Fig.4 The analysis diagram of shunting process in reverse arrangement for fully automatic operation depot
由月检库返回停车列检库时,仍需经过信号转换轨,经过2次换向。但是换向过程除信号转换时需有司机配合外,其他换向过程由列车自动运行完成,调车较为简便。
综上所述,采用倒装方案时,列车出入月检库检修调度换向次数与顺装相同,走行距离与调度总时间基本相当;但是,倒装方案由于咽喉区重叠,更有利于占地面积的充分利用。顺装、例装方案对比见表1。
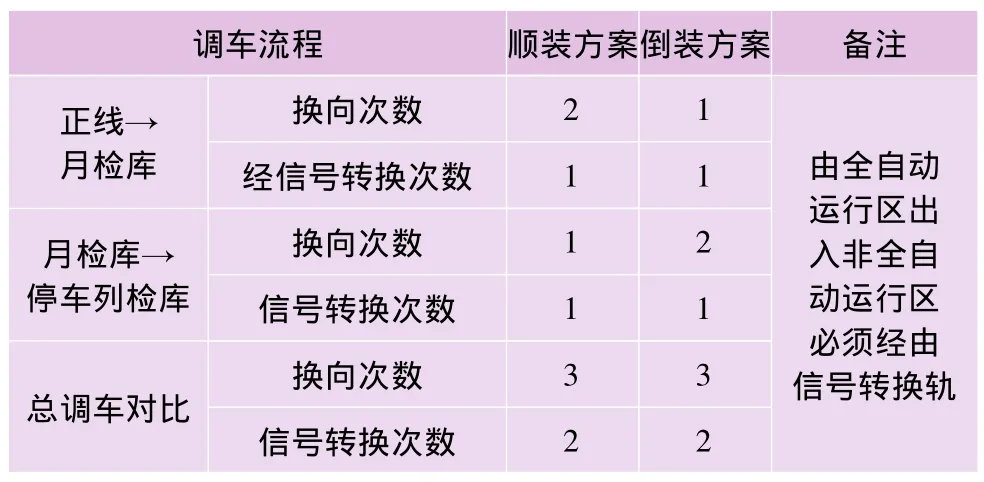
表1 顺装、倒装进出月检库调车流程对比Tab.1 The process com parison between consequent arrangement and reverse arrangement in fully autom atic operation mode while shunting in&out ofmonthly inspection area
5.3 兼容GOA 2到GOA 4模式的总体布局方案
由于按全自动驾驶等级建设的线路在开通初期一般采用传统ATO驾驶模式,需经过运营评估、安全认证等,逐步过渡到全自动驾驶模式。在人工驾驶模式下,倒装布置调车换向次数及调车距离、时间大大高于顺装模式。
由于一般线路开通初期配车数较少,停车列检库能力有一定富余,因此,建议考虑在列检库选2列位间设1处中高层平台,可完成月检功能,兼顾重型清洗列位。初期人工驾驶时,列车直接进入列检库完成月检功能,可避免倒装调车的不顺畅,如图5所示。
图5 初期人工驾驶模式月检调车流线示意Fig.5 The streamline diagram of shunting for monthly inspection in initialmanual drivingmode
待实现全自动驾驶后,倒装方案调车流程如上节所述。综上,该思路设计的车辆段倒装方案可保证GOA 2到GOA 4运营模式全过程的调车工艺顺畅。
6 设计特点
综上,满足全自动驾驶的车辆段在检修工艺、总图布局等方面与常规人工驾驶车辆段存在明显区别,主要体现在以下几方面:
1)为确保段内行车安全,检修、运营管理便捷,车辆段由自动运行区和非自动运行区构成,列车由自动运行区到非自动运行区需经过转换轨,进行信号模式的转换。停车列检库、洗车库及试车线一般设于自动运行区,检修库设于非自动运行区。
2)自动运行区与非自动运行区之间设物理隔离,且有边界防护。
3)新增列车清洗机与信号系统的接口,列车可实现全自动洗车。
4)为便于管理,停车列检库设置若干防护区,各防护区间设置物理分割。因此,大库宽度略有增加。
5)综合用地利用、检修调车工艺等方面考虑,全自动驾驶模式下倒装布置方案相对于顺装方案有一定优势,这也是全自动驾驶车辆段总体布局与传统车辆段总体布局最大的区别。
7 结语
本文结合全自动驾驶的特点,结合全自动驾驶车辆段设计时新增和增强的功能,从分析全自动驾驶车辆段检修工艺流程的运营场景入手,并借鉴国外典型案例,对全自动驾驶车辆段总体布局方案提出了设计思路。全自动驾驶车辆由于其自动运行区和非自动运行区的划分,以及转换轨位置的不同,与传统车辆段总体布置有着较大的不同。在设计时要充分考虑自动运行区的划分和车辆调车方式的不同,并考虑开通初期人工驾驶模式到全自动驾驶模式的平滑过渡。
另外,由于国内目前还没有相关的规范与标准,在今后的全自动驾驶车辆段设计工作中,设计者应充分理解全自动驾驶技术的安全理念,从分析运营场景入手,指导车辆段设计,并协助运营单位制定与之相配套的运营规则。
[1]任安萍.浅谈我国全自动无人驾驶地铁的发展[J].科技视界,2012(25):207 208.
REN Anping.Introduction to the developmentof fully automatic operation metro in China[J].Science&technology vision,2012(25):207 208.
[2]Urban guided transportmanagement and command/control systems:IEC 62290—2012 Railway applications[S].Geneva,2012.
[3]Automated urban guided transport(AUGT)-Safety requirements:IEC 62267—2009 Railway applications[S].Geneva,2009.
[4]宋传龙.基于CBTC控制的列车全自动驾驶系统(FAO)的发展及应用[J].电子世界,2014(3):31- 32.
SONG Chuanlong.The development and application of fully automatic operation system(FAO)based on CBTC control[J].Electronics world,2014(3):31 32.
[5]张海涛,梁汝军.地铁列车全自动无人驾驶系统方案[J].城市轨道交通研究,2015(5):33- 37.
ZHANG Haitao,LIANG Rujun.The subway solution of fully automatic operation system[J].Urban mass transit,2015(5):33- 37.
[6]武长海.城市轨道全自动无人驾驶技术应用探讨[J].铁路通信信号工程技术,2016(5):54- 58.
Wu Changhai.Application of full automatic driverless technology in urban rail transit[J].Railway signalling&communication engineering,2016(5):54- 58.
[7]张爽.北京地铁机场线无人驾驶系统运营管理模式初探[J].现代城市轨道交通,2013(5):75- 76.
ZHANG Shuang.Prelim inary exploration of operationmanagementmode about fully automatic operation in Beijing subway airport line[J].Modern urban transit,2013(5): 75- 76.
[8]朱蓓玲,宋键.全自动无人驾驶车辆功能与特点[J].地下工程与隧道,2005(4):33- 36.
ZHU Beiling,SONG Jian.The vehicle functions and features of fully automatic operation[J].Underground engineering and tunnels,2005(4):33- 36.
[9]王曰凡.全自动无人驾驶系统--全新理念的城市轨道交通模式[J].城市轨道交通研究,2006(8):1 5.
WANG Yuefan.A new idea of urban rail transitmode:The system of fully automatic operation[J].Urban mass transit,2006,9(8):1- 5.
[10]李晶.城轨全自动驾驶信号系统方案设计及运营场景分析[J].铁道通信信号,2016(2):48- 52.
LIJing.Signal system design&operation scenario analysis of fully automatic operation in urban transit[J].Railway signalling&communication,2016(2):48- 52.
[11]北京城建设计发展集团股份有限公司,北京市轨道交通建设管理有限公司.全自动驾驶车辆段安全管控系统及方法:中国,CN 201510224690.3[P].2015- 08 26.
Beijing Urban Construction Design&Development Group Co.,Ltd.,Beijing Rail Transit Construction and Management Co.,Ltd..Safety control system&method of fully automatic operation depot:China,CN 201510224690.3[P].2015 08 26.
(编辑:郝京红)
Overall Depot Layout for Fully Automatic Operation in Urban Rail Transit
GUO Zekuo
(Beijing Urban Construction Design&Development Group Co.,Ltd.,Beijing 100037)
The impactsof the inverted and forward arrangements for an automatic operation depotare analyzed from the perspective of the typical operational scenario in a fully automatic operation depot.The characteristics of the automatic operation depot are summarized,and the general layout design is put forward on a basis of operation scenarios.For example,new zones for fully automatic operationmustbe considered in the depot,and the fully automatic function of the train can be realized by the signal system;the interfacesw ith the communication,signal,videomonitoring,fire alarm system,etc.should be added for the integrated automatic driving system.The analysis shows that differences exist in the overall arrangement of the depot for fully automatic vehicles considering the division between the automatic operation area and the non- automatic operation area,aswell as the different sw itch rail positions,compared w ith the traditional depot.In the design of an automatic operation depot,the general layout should give full consideration to run automatically w ith the different division and the differentmethods of vehicle shunting.
urban rail transit;fully automatic operation;depot design;operation scenarios;overall layout program
U231
A
1672- 6073(2017)02- 0042- 06
10.3969/j.issn.1672 6073.2017.02.009
2016- 07 07
2017 01 16
郭泽阔,男,硕士,高级工程师,车辆工艺室主任兼长春分院副总工程师,从事车辆段工艺设计研究,11098926@qq.com
北京科委社会发展领域储备项目(D16110600010000)
猜你喜欢
云南画报(2021年10期)2021-11-24
铁道通信信号(2020年12期)2020-03-29
工程与建设(2019年2期)2019-09-02
铁道通信信号(2018年9期)2018-11-10
铁道通信信号(2018年7期)2018-08-29
减速顶与调速技术(2018年4期)2018-08-27
铁道通信信号(2018年1期)2018-06-06
上海铁道增刊(2017年3期)2018-01-22
西南交通大学学报(2016年3期)2016-06-15
铁道通信信号(2016年2期)2016-06-01
