Delta机器人传送带控制系统研究
2017-07-04 06:54宋婷婷徐世许伍经纹
软件 2017年5期
宋婷婷,徐世许,伍经纹,王 鹏
(青岛大学 自动化与电气工程学院,山东 青岛 266071)
Delta机器人传送带控制系统研究
宋婷婷,徐世许,伍经纹,王 鹏
(青岛大学 自动化与电气工程学院,山东 青岛 266071)
本文针对制造业中人工分拣产品效率低下、错误率和成本较高的问题,将工业机器人应用于产品分拣。设计了Delta视觉机器人在工业生产中整体的控制流程,由视觉部分捕获传送带上的产品,经过一系列分析处理后移动机械手,实现对产品的抓取。为更准确抓取产品,重点提出了一种针对Delta视觉机器人传送带标定的方法。准备好两个标定物.然后按照下述步骤完成标定:第一步,使机械手末端与第一个标定物重合,第二步,移动传送带一段距离后使机械手重合同一点,第三步保持传送带不动移动机械手,使机械手与第二个标定物重合,从而完成标定。
标定;传送带;Delta视觉机器人
0 引言
近年来,随着经济发展和制造业竞争的加剧,人工分拣产品的弊端日益显露。人工分拣不仅仅速度慢,影响效益,且长时间的单调工作容易使工人疲劳,引发人身安全隐患。国外机器人技术已经较成熟机器人在工业生产中的使用量逐年增长。机器视觉[1-4]是机器人智能化的核心技术之一,而标定在机器视觉占有极其重要的地位,标定直接影响到机器人的工作准确度。本文根据制造业生产线实际需求,设计了Delta机器人总体控制系统流程,并提出一种使用两个标定物进行传送带标定的方法,为Delta机器人提供了视觉指导,且标定过程耗时少,效率高。
1 Delta机器人系统
1.1 系统结构
机器人系统的主要任务是对当前要抓取的工件(如齿轮、螺栓、弹簧挚片等)进行拍摄,由计算机分析处理得到的数据得出分析结果,然后传递给执
行机构进行抓取。本系统主要由以下部分组成:输送装置(1)、信号触发子系统(2)、光源子系统(3)、图像采集装置(4)、控制子系统(5)、执行机构子系统(6)、图像处理及分析软件(7)。整个系统框架结构如图1所示。
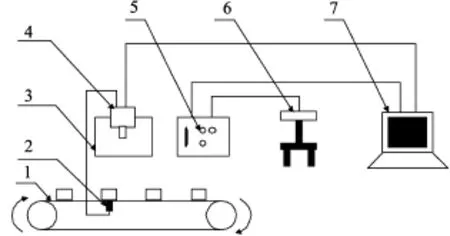
图1 Delta机器人系统结构Fig.1 The Architecture of Delta Robot System
1.2 控制系统原理
Delta视觉机器人用于工业生产线上自动定位以及自动抓取分拣产品。设计控制系统将计算机视觉与Delta机器人相结合,在Delta机器人下方安装传送带进行产品的输送,结合Delta机器人建立起视觉系统,由摄像机拍摄传送带上的产品获取产品的图像,根据图像的亮度、颜色等信息,经过图像分析和处理、坐标之间的转换,计算出产品在机器人坐标系下的坐标,由上位机将坐标信息传送给下位机,下位机控制电机移动机械手,实现对产品的抓取。控制系统流程如图2所示。
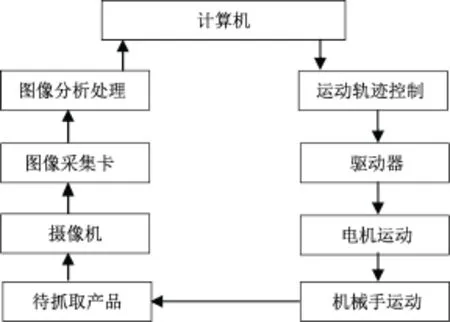
图2 Delta机器人系统工作原理Fig.2 Working Principle of Delta Robot System
2 Delta机器人运动流程及应用
如图3所示,Delta机器人[5-7]是空间三自由度的并联机构。Delta机器人机构主要由下方的运动平台、上方的基座平台、伺服电机、平行四边形从动支链和驱动臂组成。上方的基座平台下面装有3个电机,成圆周对称均匀分布,基座平台由运动支链连接到运动平台。每一条运动支链都由驱动臂和平行四边形的小臂组成,运动平台底部装有吸盘,用来抓取产品。Delta机器人并行三自由度的机械臂结构,使得抓取产品的速度高且重复定位的精度高。当机器人收到命令需要抓取物体时,控制系统控制电机使驱动臂运动一定角度,小臂跟随驱动臂移动,使得运动平台到达系统指定的坐标点。
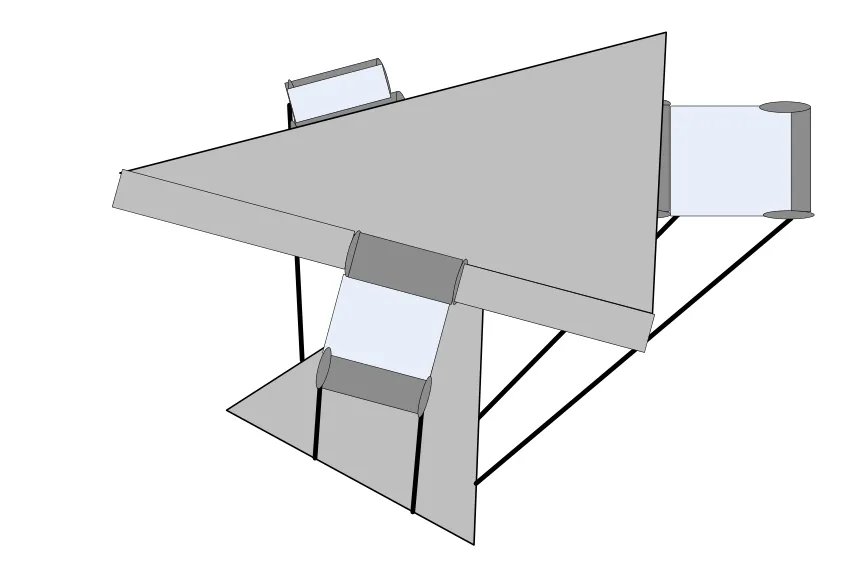
图3 Delta机器人结构图Fig.3 The Structure diagram of a Delta Robot
Delta机器人的整体结构紧凑、精密,驱动臂均匀分布于固定平台,因而使其具有如下特性:自重负荷比小;并行三自由度机械臂结构、重复定位精度高;一秒钟内可多次拾取物品,效率高。Delta机器人载重负荷低,但是行动灵活高速,又因其性价比高、定位精确而被广泛应用于电子产品配件、药品、食品等加工、装配生产线。Delta机器人一般与电机驱动的传送带配套使用,通过传送带编码器和计算机视觉系统反馈位置的方式,实现机器人对工件位置、姿态的获取,从而准确抓取工件。
3 传送带标定设计
传送带标定是为了确定传送带坐标系和机器人坐标系之间的关系。为了准确快速抓取产品需要对传送带进行精准的标定,本文针对Delta机器人设计了一种耗时短、操作方便的标定方法。
3.1 比例因子与转换矩阵
传送带坐标系和机器人坐标系之间的转换就是矩阵的旋转以及平移,传送带标定的任务是确定转换矩阵和编码器的比例因子。文中以R表示机器人坐标系,以C表示传送带坐标系,以CP表示产品在传送带坐标系中的位置,以RP表示产品在机器人坐标系中的位置,以RCT表示传动带坐标系对于机器人坐标系的转换矩阵。转换矩阵是由平移向量和旋转矩阵构成。求出转换矩阵后,由产品在传送带坐标系中的坐标信息就可以确定该产品在机器人坐标系中的位置:。当移动传送带一段距离,对应的机器人坐标系和编码器的变化值的比例关系即为传送带旋转编码器的比例因子。
3.2 传送带的标定操作
准备好与Delta机器人末端一样大小的两个“标定物”,可以打印与机器人末端大小相同的黑色形状作为标定物,分别记为O1,O2。
(1)在传送带上放置O1,在示意图中以P1表示。移动机械手末端使机械手末端与O1完全重合,此时编码器的值记为V1,Delta机器人末端的位姿记为P1(x1,y1,z1,ya1,pi1,ro1)。
(2)移动传送带一段距离,在Delta机器人可以触碰到O1的范围内,尽量使移动距离更大。再次移动机械手的末端使机械手末端与O1完全重合,在示意图中以P2表示。此时编码器的值记为V2,Delta机器人末端的位姿记为P2(x2,y2,z2,ya2,pi2,ro2)。
(3)保持传送带不动,沿着与传送带垂直的方向移动Delta机器人,使机械手末端与O2完全重合,在图4中以P3表示。Delta机器人末端的位姿记为P3(x3,y3,z3,ya3,pi3,ro3)。
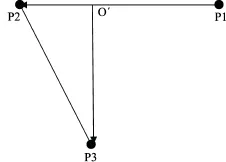
图4 标定示意图Fig.4 Illustration of Calibration
下面可以求得编码器比例因子:
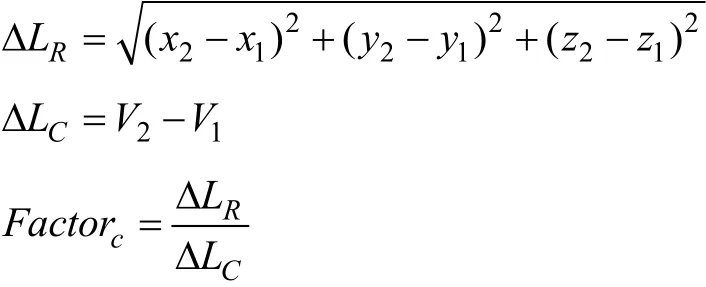
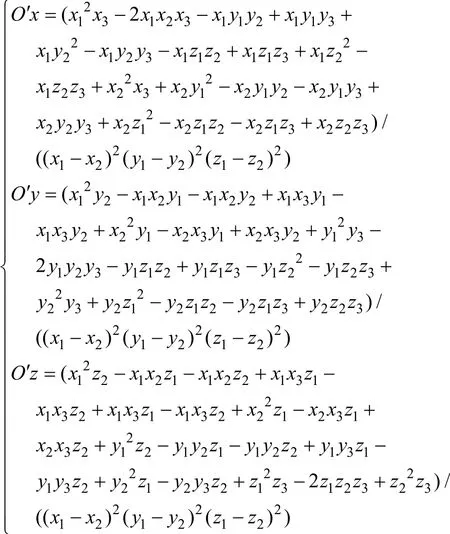
定义传送带坐标系的x1轴方向为传送带的移动方向,根据几何关系可以计算得到在机器人坐标系中传送带坐标系原点O’的坐标以及机器人坐标系到传送带坐标系的旋转矩阵。
旋转矩阵:
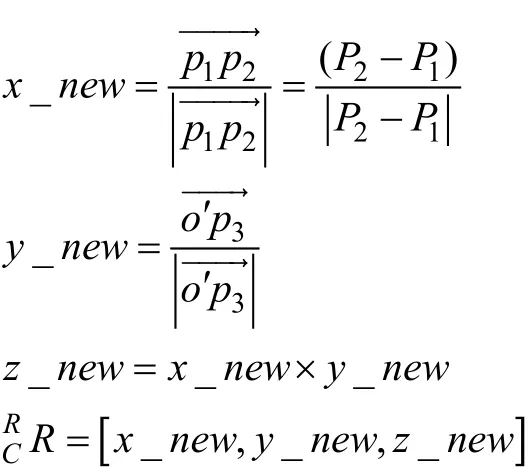
由上述结果可以求得机器人坐标系到传送带坐标系的转换矩阵:
4 目标识别与定位
标定工作完成后,可以结合图像与标定信息对目标工件定位,主要包含三项工作:图像处理、识别工件[8-10]、定位工件[11]。
4.1 图像处理
在实际成像过程和图像传输过程中,受到各种因素的干扰,图像的清晰度会降低,这对后续的工件识别和定位工作造成很大的困难,为此,需要对图像进行处理,使其达到一定的清晰度。这些处理过程包括平滑去噪[12,13]、图像锐化、图像分割[14]。因为本文的任务是抓取工件,还需要把图像转化为二值图像。
4.2 识别工件
本文采用特征匹配法识别目标工件,以面积和圆度作为特征进行匹配,设L、D分别为工件图像范围的长和宽,K(i, j)表示二元象素值0或1,i,j分别表示象素横坐标和纵坐标。则工件的面积为:
工件圆度为:
4.3 定位工件
识别出工件后,需要计算工件位置,供Delta机器人进行运动控制抓取工件。工件的位置通过其中心确定,中心的图像坐标可以表示为
式中,u,v以图像左上角为坐标原点。根据u、v和摄像头的标定信息即可获得工件在传送带中的位置,通过传送带的标定信息又可获得工件在机器人坐标系中的位置,供机器人进行抓取。
5 结束语
本文基于机器人的运动原理设计了一种针对于Delta视觉机器人的传送带标定方法。通过该方法可以快速有效的标定传送带。该方法全面的考虑了Delta视觉机器人的系统的运作原理,并且结合了其特有的运动规律,标定过程操作简单便于上手,满足了一般的生产需求,应用前景广泛。且所需成本低,耗时短,有效的提高了效率,对于提高企业效益有很好的帮助。
[1] 周昌印. 机器视觉中若干重要问题的研究[D]. 复旦大学, 2007.
[2] 段峰, 王耀南, 雷晓峰, 吴立钊, 谭文. 机器视觉技术及其应用综述[J]. 自动化博览, 2002, (1): 59-61.
[3] 张炜. 机器视觉技术发展及其工业应用[J]. 红外, 2006, 27(2): 11-17.
[4] 刘建桥, 叶俊勇. 基于机器视觉的轻轨轨道梁晃动检测[J].新型工业化, 2011, 1(5): 37-41.
[5] 倪鹤鹏, 刘亚男, 张承瑞, 王云飞, 夏飞虎, 邱正师. 基于机器视觉的Delta机器人分拣系统算法[J]. 机器人, 2016, 38(1).
[6] 殷盛江, 于复生, 时维康, 孙中国. Delta机器人控制系统设计[J]. 起重运输机械, 2015(1): 17-19.
[7] 王振宁. 基于视觉的机器人抓取定位技术研究[D]. 上海大学, 2005.
[8] 吴进. 机器视觉中快速模版匹配算法研究[J]. 新型工业化, 2014, 4(1): 65-69.
[9] 郭津. 机器视觉边缘检测技术及应用研究[D]. 广东工业大学, 2011.
[10] 刘洪伟. 基于单目视觉的移动机器人目标识别与定位[D].山东大学, 2011.
[11] 申茂盛. 基于双目视觉的质心定位算法的研究[J]. 软件, 2014, 35(12): 69-74.
[12] 曹妍, 陈伟, 徐森. 图像去噪方法研究与仿真[J]. 软件, 2015, 36(4): 33-36.
[13] 张小华, 张强. Shearlet 域非局部均值图像去噪[J]. 新型工业化, 2011, 1(3): 63-71.
[14] 陈静, 朱家明, 盛朗, 等. 基于区域信息的水平集医学图像分割[J]. 软件, 2014, 35(4): 21-23, 28.
DeltaRobot Conveyor Control System Research
SONG Ting-ting, XU Shi-xu, WU Jing-wen, WANG-Peng
(College of Automation and Electrical Engineering, Qingdao University, Qingdao 266071, China)
Aiming at the problem of low efficiency, low error rate and high cost of manual sorting in manufacturing industry, this paper proposes a product sorting method based on machine vision. the overall control process of the Delta visual robot in the industrial production is designed. The visual part of the conveyor belt is used to take pictures of the product.. Then the scene information such as the position and the attitude of the product are derived from the pictures, and these information are used for the manipulator to grab the product. To achieve a more accurate grasp of the product, a method for calibration of Delta vision robot conveyor belt is proposed. Two calibrators need to be prepared in advance. The calibration method includes the following steps. Firstly, make the end of the manipulator coincide with the first calibration. Secondly, move the conveyor belt for a distance to contract the robot. Thirdly, and move the robot while keep the conveyor still, and make the manipulator coincide with the second calibrator.
Calibration; The conveyor belt; Delta robot vision
TP242.2
A
10.3969/j.issn.1003-6970.2017.05.025
宋婷婷(1992-),女,山东济宁人,硕士研究生,主要研究方向为智能控制系统;徐世许(1965-),男,教授,博士,主要研究方向计算机控制技术;伍经纹(1993-),男,湖北天门人,硕士研究生,主要研究方向为智能控制系统;王鹏(1991-),男,山东青岛人,硕士研究生,主要研究方向为智能控制系统。
本文著录格式:宋婷婷,徐世许,伍经纹,等. Delta机器人传送带控制系统研究[J]. 软件,2017,38(5):121-124
猜你喜欢
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年1期)2016-04-16
机电信息(2015年3期)2015-02-27
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
河南科技(2014年11期)2014-02-27
物理通报(2012年1期)2012-03-20