
接触网几何参数的提取与分析
2017-07-31 16:24代思洋唐明新赵环宇
大连交通大学学报 2017年4期
代思洋,唐明新,赵环宇
(大连交通大学 电气信息学院,辽宁 大连 116028)
接触网几何参数的提取与分析
代思洋,唐明新,赵环宇
(大连交通大学 电气信息学院,辽宁 大连 116028)
针对接触网几何参数高速、动态测量的实际需要,提出一种利用改进的Harris角点检测算法对接触网的几何参数进行提取,并计算提取图像中的角点的曲率及梯度.在分析检测结果与接触网几何参数检测的特殊性后,绘制出导高变化曲线和动态拉出值曲线.利用导高的变化曲线对受流参数硬点进行分析.结果表明,该方法可以成功对该段线路内接触网的受流参数硬点进行判别.
接触网;几何参数;Harris角点检测算法;受流参数硬点
0 引言
接触网是电气化铁路中向电力机车提供动力的关键设备[1],其可靠与否直接影响着整个铁路运输系统的安全与效率.它具有所处空间环境复杂、受气候条件影响大、无备用、负荷不确定、庞大的机械结构和多学科复合的六大特性[2].按照检测技术手段的不同可分四种:人工检测;接触式弓网检测;非接触式激光雷达弓网检测和非接触式图像处理技术弓网检测[3].在实际检测系统中,通常采用多种技术手段相结合的的检测方法.检测项目主要包括导高、拉出值、坡度、接触压力及硬点.其中导高和拉出值分别指的是:接触线与钢轨平面垂直距离、接触线与轨道中心水平距离.国外接触网检测各国都有不同的检测重点.德国重视弓网间的接触压力,其接触网动态接触压力检测技术是目前国际上比较先进的检测技术,通过在检测车受电弓上加装压力传感器和加速度传感器来实现[4].日本的滑板普遍采用冶金粉末滑板,该材质的滑板对接触线的磨损严重,所以日本侧重对弓网离线与接触网磨耗的检测[5];我国的接触网检测开始于上世纪60年代,随着图像处理技术的发展,我国的接触网检测目前是基于图像处理的非接触式检测,通过在检测车顶部安装摄像机和补光光源,利用线结构光视觉测量技术[6-8],将采集到的图像经过图像处理与模式识别,获取接触网的主要部件的相关参数.
本文提出利用Harris角点特征检测算法实现对接触网几何参数的提取,并从尺度敏感、相邻像素取差、感兴趣区域参数检测[9]三个方面对Harris角点检测进行改进,从而实现单帧图像的几何参数快速提取.在对几何参数进行分析后,对接触网的受流参数硬点进行判别.
1 基于Harris的角点特征检测
1.1 Harris基本原理
假设在图像的各个方向上移动一个窗口:如果窗口区域内在灰度的各个方向上都没有显著变化,如图1(a)所示,则对应图像平滑区域;如果窗口区域内在灰度的某个方向上移动有较大变化,如果1(b)所示, 则窗口区域对应图像边缘; 如果

图1 移动Harris窗口进行角点检测示意图
窗口区域内在灰度的多个方向上有明显的变化,如图1(c)所示,则认为窗口内包含角点.
Harris角点检测就是利用这个直观的物理现象,通过窗口内灰度在各个方向上的变化程度,确定其是否为角点[10].图像I(x,y)在点(x,y)处平移(u,v)后产生的灰度变化E(x,y,u,v)如式(1)所示.

(1)
式中,S是移动窗口的区域;w(x,y)是加权函数,可以是常数或高斯函数,高斯函数对离中心点越近的像素赋予越大的权重,以减小噪声的影响.
Harris算子用Taylor展开I(x+u,y+v)去近似任意方向:
(2)
于是,灰度变化可以重写为:

(3)
式(3)中M是2×2的矩阵,它是关于x和y的二阶函数,因此E(x,y,u,v)是一个椭圆方程.椭圆的尺寸由M的特征值决定,它们表征了灰度变化最快和最慢的两个方向;椭圆的方向由M的特征矢量决定[11],如图2所示.

图2 二次特征值和椭圆的关系图
其中,A代表(λmax)-1/2,即快速变化的方向;B代表(λmin)-1/2,即缓慢变化的方向.二次项函数的特征值与图像中的角点、直线和平面之间的关系可以为以下三种:
(1)图像中的边缘;一个特征值大,一个特征值小,也就是说灰度变化在某个方向上变化大,在某个方向上变化小,对应图像的边缘或者直线.
(2)图像中的平面;两个特征值都很小,此时灰度变化不明显,对应图像的平面区域.
(3)图像中的角点;两个特征值都很大,灰度值沿多个方向都有较大的变化,因此可认为其是角点.由于求解矩阵M的特征值需要较大的计算量,而两个特征值的和等于矩阵M的积,两个特征值的积等于矩阵M的行列式,所以Harris使用一个角点响应值R来判定角点质量:
det(M)-k[trace(M)]=
(4)
式中,k是经验常数,一般取值范围为0.04~0.06[12].
1.2 Harris算法流程
(1)计算图像I(x,y)在x和y两个方向上的梯度Ix和Iy:
(5)
(2)计算每一个像素点上的相关矩阵M:


(6)
(3)计算每个像素点的Harris角点响应值R:
(7)
(4)最后,在N×N范围内寻找极大值点,如果其Harris响应大于阈值,则可将其视为角点.
2 改进的Harris角点检测
本文中对采用Harris角点检测算法的目的是实现对接触网几何参数的提取,针对Harris角点的性质与接触网几何参数检测的特点,主要通过相邻像素取差法和感兴趣区域参数检测两个方面对Harris算法进行改进.
2.1 基于相邻像素取差法的时间优化
为了提高角点检测的检测速度,采用基于八邻域的相邻像素取差的方法[13]对Harris角点检测进行再改进,八邻域像素图如图3所示,P代表中心点(i,j),P1~P8代表该中心点的八个邻域.设置阈值参数t,t表示点(i,j)八邻域的“相似度”参数,若中心点与邻域其他八个点的像素之差在(-t,t)之间,则判定他们为相似点,相似点不在候选角点之列.若点(i,j)周围有0,1,7,8个相似点,那点(i,j)就不是角点,可以直接忽略,从而提高角点检测的运算速度.

P1P2P3P8PP4P7P6P5
图3 八邻域像素图
设置阈值参数t=20,高斯窗口大小为5×5,标准偏移为2,利用相邻像素取差法对Harris角点检测算法进行改进,得到图4和表1.
(a)改进前

(b)改进后

表1 基于相邻像素取差法的时间优化表
从表1中可以看出,改进前与改进后,检测出的角点数目没有较大的差别,但算法的运行时间却大大缩短,说明相邻像素取差法对于角点检测的改进是成功且有效的.
2.2 基于感兴趣区域参数检测的时间优化
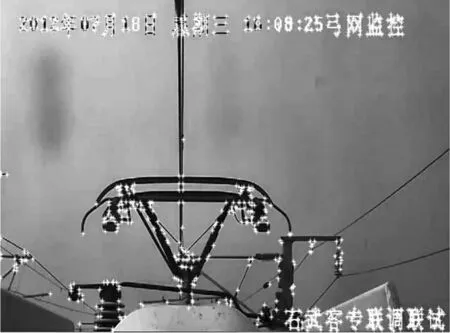
采用相邻像素取差法对算法的运行速度有了一定的提高,但从图中可以观察到,摄像头自动加载的日期与时间也参与了检测,并有许多被误认为是角点,标记统计了下来,这不仅使得角点检测后的图像过于复杂,也大大浪费了角点检测算法的运行时间.为减少算法的处理时间提高精度,提出了利用基于感兴趣区域ROI(Region Of Interest)的角点检测时间优化方法[14].
通过对原始视频图像的观察,发现弓网交汇的敏感区域多集中在如图5所示的区域当中.于是,在原Harris算法程序中加入感兴趣区域选择函数roipoly(),该函数的执行语句为BW=roipoly(I,c,r),函数根据c和r返回感兴趣的区域.其中,c和r用于说明感兴趣区域的多边形每个顶点行列序号.由图5可知,参数c和r应分别设置为[190 900 900 190 190]和[280 280 500 500 280]是较为合理的,使角点检测区域最小化的同时,也保证了弓网主体结构能够被完整检测,得到处理结果如图6和表2所示.

图5 弓网运动范围示意图

(b)改进后
图6 基于相邻像素取差法的时间优化对比图
从图6中可以看出,感兴趣区域的角点检测也实现了对弓网主干区域的检测.从表2中可以看出,改进前与改进后,检测出的角点数目大量减少,算法运行时间也随之减少,表明基于ROI角点检测的算法改进取得了成功.
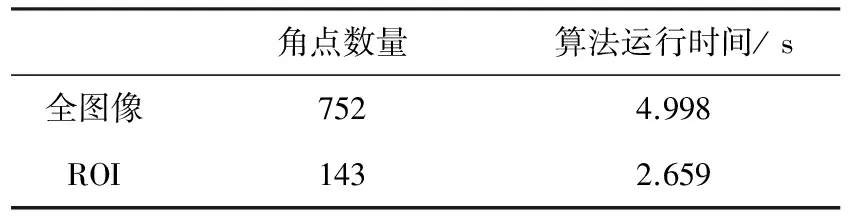
表2 基于ROI角点检测的时间优化表
2.3 目标角点提取
对改进后的角点检测图像进行观察,发现接触线与受电弓相接触的点总是位于检测区域的最上方,故从检测出的角点中提取出纵坐标最小的点,标注在图7(a)中,并对角点标注区域进行放大,如图7(b)所示.

(a)纵坐标最小点标识

(b)标识点放大图
图7 疑似目标点标识图
从图7中可以观察到,共有5个疑似目标点,依次为2个接触线与受电弓相接触而形成的角点,1个吊弦与受电弓形成的视觉角点,最后2个为承力索与受电弓形成的视觉角点.5个角点的坐标分别为(495,386),(502,386),(514,386),(528,386)和(534,386).因为在接触线、吊弦和承力索三者当中,接触线的直径最大,且接触线总是位于三者的最外侧,故将目标点确定为(495,386)和(502,386)的中间点,即(498,386).
3 接触网几何参数提取
在完成对第一帧图像中接触点的提取后,要想获得接触网导高和拉出值的动态曲线,就必须对检测视频中的图像进行连续处理,将每一帧图像中的接触点的坐标都提取出来.以受电弓与接触线之间的接触点作为目标,对目标的跟踪是在已知上一帧图像中接触点坐标的基础上完成的.
以图7作为初始图像为例,取其下一帧图像,运用改进后的Harris角点检测算法对其进行检测,得到的疑似角点坐标为(484,386),(491,386),(520,386),(523,386)和(528,386).对疑似目标点坐标取平均值,得到(509,386),而前一帧图像的疑似目标点坐标平均值为(515,386),从而可知“之”字形结构的接触线正在从左向右滑动,因为接触线始终处于吊弦、承力索的外侧,所以此时的目标点坐标可以锁定为(484,386)与(491,386)之间,故取该帧图像目标点坐标为(487,386).
先对AVI格式的接触网检测视频进行转化,转化为JPG格式的图像,对其中的200帧连续图像进行几何参数的提取,按照上面的方法对目标点坐标进行捕获,其中,对于未能检测到目标点的图像,导高统一设置为395,拉出值设置为540.得到导高变化曲线如图8所示,拉出值动态曲线如图9所示,检测失败点用星号标出.

图8 导高变化曲线图

图9 拉出值动态曲线图
在进行几何参数提取的过程中,第173帧和第186帧图像的目标点捕获失败,未能提取到当前帧接触网的几何参数.为探究检测失败原因,对第173帧和第186帧图像进行提取,如图10所示.

(a)第173帧图像

(b)第186帧图像
图10 接触点检测失败图
从图中可以明显看出,这两帧图像检测失败的原因是腕臂对目标点的检测造成了干扰,接触网本身并没有异常,故对这两帧图像的检测结果进行修正.修正的方法为取其前后两帧图像几何参数的平均值作为该帧图像的几何参数值,得到图11和图12所示的导高修正曲线图和拉出值修正动态曲线图.

图11 导高修正曲线图
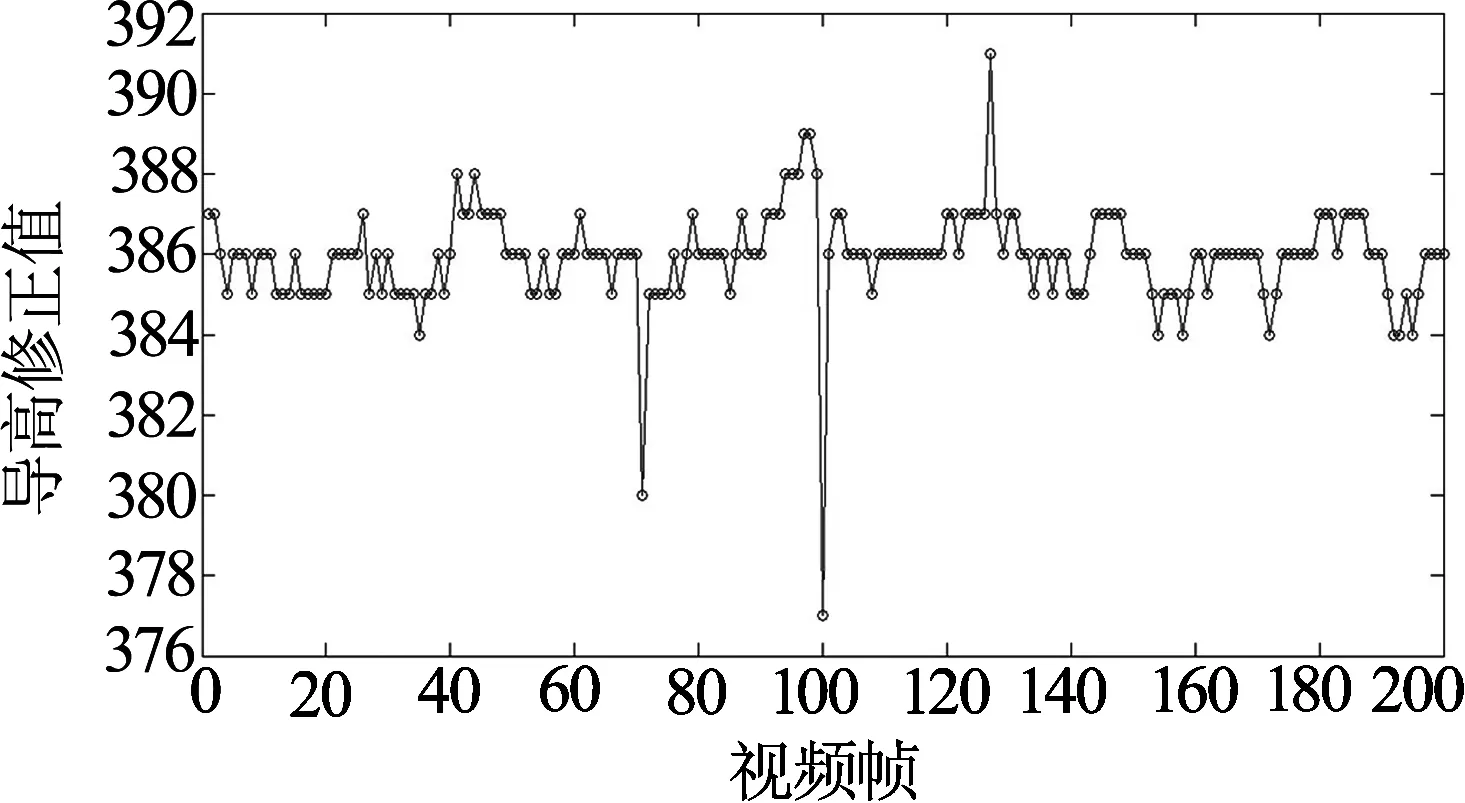
图12 拉出值修正动态曲线图
通过受流参数的检测原理:若接触线高度位移大于250 mm则判定该点为硬点,由像素值与实际值的换算,可将接触线硬点的判别条件转化为像素值,即若前后两帧图像接触线导高变化超过60像素值,则判断该点为硬点.从图12中可以明显看出,导高的变化范围最大也没有超过60像素值,故在这200帧图像中,没有检测到硬点的存在.
4 结论
本文首先提出了利用Harris角点检测算法对接触网的几何参数进行提取,并依据接触网几何参数检测的特点,从两个方面对Harris角点检测算法进行了改进,分别为:基于相邻像素取差法的时间优化和基于感兴趣区域参数检测的时间优化.然后,利用改进后的Harris角点检测方法对接触网检测视频中连续的200帧图像进行几何参数检测,绘制出导高变化曲线和动态拉出值曲线.最后,利用导高的变化曲线对受流参数硬点进行分析,判断该段线路内没有硬点存在.
[1]交通与发展课题组.交通革命:评中国交通发展之路[R].国情报告(第十卷),2012.
[2]于万聚.高速电气化铁路接触网[M].成都:西南交通大学出版社,2003.
[3]张辽.电气化铁路接触网日常维修与管理[J].现在工业经济和信息化,2014(5):63-65.
[4]韩志伟,刘志刚.非接触式弓网图像检测技术研究综述[J].铁道学报,2013(6):39- 47.
[5]中华人民共和国铁道部.高速铁路供电安全检测监测系统(6C系统)总体技术规范[R].铁道部运输局供电部,2012.
[6]戚广枫.高速铁路牵引供电安全技术发展及展望[J].中国铁路,2012(11):18-21.
[7]占栋,于龙,肖建,等.接触网几何参数高速动态视觉测量方法研究[J].仪器仪表学报.2014,35 (8):1852-1859.
[8]KIESSLING,PUSCHMANN,SCHMIEDER,et al.Contact lines for electric railways[M].Erlangen:Publicis Publishing,2009.
[9]蔡学敬.基于图像处理技术的高速接触网动态监测系统研究[D].成都:西南交通大学,2008.
[10]YI Y X, YE X M, LI ZH K,et al.Non-contact measurement of contact wire[C].2008 International Conference on Optical Instrumentation and Technology:Optoelectronic Measurement Technology and Applications,2008.
[11]HUI B W, WEN G J, ZHANG P,et al.A novel line scan camera calibration technique with an auxiliary frame camera[J].IEEE Trans.on Instrumentation and Measurement,2013,62(9): 2567-2575.
[12]BOFFI P, CATTANEO G,AMORIELLO L,et al.Optical fiber sensors to measure collector performance in the pantogragh-catenary interaction[J].Sensors Journal,IEEE,2009,9(6):635-640.
[13]张韬.基于图像处理的接触网检测系统研究与改进[J].铁道机车车辆,2008,28(6):68-71.
[14]LUNA C A, MAZO M, LAZARO J L,et al.Method to measure the rotation angles in vibrating systems[J].IEEE Trans.on Instrumentation and Measurement,2006,55(1):232-239.
基于停车行为分析的出行路径选择研究
雷昆峰1,黄志鹏1,2,张卫华1
(1.合肥工业大学 汽车与交通工程学院,安徽 合肥 230009;2.东南大学 交通学院,江苏 南京 210009)
摘 要:城市交通系统中,停车需求与供给的矛盾关系引发的静态交通问题越来越严重,路网中存在大量的巡游交通,降低了路网的通行效率.本文对出行者停车行为进行分析,建立了由路网出行费用、停车费用及感知步行费用等组成的广义出行费用函数,基于Kirchhoff模型与随机用户均衡理论构造了考虑路段及转向费用的路径选择模型,并通过算例进行验证.结果表明:随机用户均衡状态下出行者步行时间感知差异及停车场特性会影响出行者路径及停车场选择,停车场分担率与步行感知时间呈负相关,与停车场的特性值呈正相关.
Extraction and Analysis of Catenary Geometry Parameter
DAI Siyang, TANG Mingxin, ZHAO Huanyu
(School of Electrical and Information Engineering, Dalian Jiaotong Univesity,Dalian 116028,China)
Aiming at dynamic high-speed of catenary detection, an improved Harris corner detection algorithm are used to extract the catenary geometry parameters, and the curvature and gradient of extractive picture are calculated. After analysing the detective result and the particularity of catenary geometry parameters, the curve of height of conductor and dynamic stagger value are obtained to analyze hard point of current collective parameters. The result shows that the method can successfully judge this road section hard point of current collective parameters.
catenary; geometry parameter; Harris corner detection algorithm; current collective parameter; hard point
1673- 9590(2017)04- 0181- 06
2016-08-10
代思洋(1991-),女,硕士研究生;唐明新(1961-),男,教授,硕士,主要从事现场总线技术应用与网络控制的研究E- mail:543586593@qq.com.
A
猜你喜欢
科学咨询(2021年31期)2021-12-29
云南画报(2021年10期)2021-11-24
中国铁路(2020年7期)2020-10-09
电子技术与软件工程(2018年10期)2018-07-16
北京汽车(2018年2期)2018-05-02
中国设备工程(2018年7期)2018-04-21
电子科技(2016年12期)2016-12-26
系统工程与电子技术(2016年4期)2016-08-24
西南交通大学学报(2016年3期)2016-06-15
现代工业经济和信息化(2016年4期)2016-05-17
