一种同时具有攻击时间和攻击角度约束的协同制导律
2018-01-08 02:21王晓芳王紫扬
弹道学报 2017年4期
王晓芳,王紫扬,林 海
(北京理工大学 宇航学院,北京 100081)
一种同时具有攻击时间和攻击角度约束的协同制导律
王晓芳,王紫扬,林 海
(北京理工大学 宇航学院,北京 100081)
为了实现多枚导弹从不同的方向对目标进行饱和攻击,建立了导弹和目标的非线性运动模型,并对模型进行归一化;设定理想攻击时间和攻击角度,利用具有攻击时间约束的制导律得到初始猜测控制量,采用模型预测静态规划方法对控制量进行迭代更新直至满足脱靶量和角度约束条件,从而得到能够同时满足攻击时间和攻击角度约束的次优协同制导律。仿真验证结果表明:在合理给定理想攻击时间和攻击角度的前提下,本协同制导律具有良好的性能和较强的鲁棒性,且计算效率高,具有在线优化的潜力。
多导弹;攻击时间约束;攻击角度约束;模型预测静态规划
随着反导技术的不断发展,现代战场中导弹的突防和目标攻击面临着越来越大的挑战。此时,单枚导弹的作战能力显得非常有限,如果多枚导弹能够协同作战则会大大增强导弹的突防能力和对目标的打击能力,因此同时具有攻击角度和攻击时间约束的制导律具有重要的研究意义。
目前,对于单独具有攻击角度约束的制导律的研究比较多[1-3],而对于单独具有攻击时间约束的协同制导律的研究则相对较少[4-5],对于同时具有攻击角度和攻击时间约束的制导律的研究则更少[6-10]。文献[6~7]针对常速导弹攻击静止目标的情况,建立了导弹运动模型并对其进行线性化,分别将加速度的导数和加速度作为控制量,然后分别基于最优控制理论和线性二次微分对策理论设计了同时具有攻击时间和攻击角度约束的制导律。同样针对常速导弹攻击静止目标的情况,文献[8]在考虑速度前置角和法向加速度约束的前提下,基于约束最优化理论设计了同时控制攻击时间和角度的制导律。上述制导律中,都是针对攻击固定目标的情况,对于机动目标不再适用。另外,文献[6~7]对模型的线性化也降低了模型的精度、限制了制导律的应用。文献[9]提出一种通过设计视线角及视线角速率变化曲线并进行跟踪来实现攻击时间和角度约束的方法,文献[10]将控制变量看作是导弹剩余航程的多项式函数,通过设计多项式函数中的系数实现对攻击时间和角度的控制。本文不同于上述制导律的设计思路,在考虑导弹非线性模型以及目标机动的情况下,基于预测-修正的思路,提出一种能够对攻击时间和攻击角度进行控制的制导律。
模型预测静态规划(Model Predictive Static Programming,MPSP)是近几年由Padhi和Oza提出的一种新型算法[11],它将弹道优化的概念引入到制导律的设计中,将动态规划问题转化为静态规划问题,能够得到具有终端约束的次优制导律[12],但是其并未对攻击时间进行约束,不适用于多导弹的协同作战,另外,文献中也没有对制导律的鲁棒性进行研究。
本文针对多枚导弹协同攻击静止或机动目标的情况,首先建立了平面内导弹和目标的非线性运动模型,并对其进行归一化;基于文献[4]的具有攻击时间约束的制导律(Impact Time control Guidance,ITCG)生成了初始的满足攻击时间约束的协同制导律指令,将其作为初始猜测解;采用MPSP方法,在对末端状态进行不断预测修正的前提下,对初始猜测解进行不断调整,直到能够同时满足攻击时间和攻击角度的约束,从而得到能满足约束条件且控制能量最小的次优协同制导律。通过多种场景的仿真验证了制导律具有良好性能和强鲁棒性。
1 问题描述
不失一般性,以一枚导弹在攻击平面内攻击目标为例来说明问题。导弹与目标的运动情况如图1所示。图中,Oxy为惯性坐标系;r为导弹和目标之间的距离;q为弹目连线与Ox轴的夹角,即视线角;(xm,ym)为导弹在惯性坐标系中的位置坐标;vm为导弹速度;θm为导弹速度矢量与基准线之间的夹角,即航向角;am为导弹的法向加速度,垂直于导弹速度矢量;(xt,yt)为目标的位置坐标;vt为目标速度;θt为目标航向角;at为目标的法向加速度。
假设导弹常速飞行,其非线性运动模型为
(1)
式中:(xmymθm)T为导弹的状态变量,am为控制变量。对状态变量和控制变量进行归一化处理,得到:
(2)
式中:带下标“n”的量表示归一化后的变量,带上标“*”的量代表归一化的参考数值。则归一化后的导弹运动方程组为
(3)
目标的非线性运动模型为
(4)
同样,将目标运动方程组进行归一化处理得到:
(5)

2 基于MPSP的协同制导律
当基于MPSP设计制导律时,首先需要有某初始猜测控制量,基于此初始猜测控制量,通过预测得到末端状态偏差,然后用迭代算法求解整个时间段内的协态向量来更新控制变量,直至输出结果收敛于期望输出。
2.1 初始猜想控制量
由于要对导弹的攻击时间进行约束,因此,针对某给定的理想攻击时间t*,采用文献[4]中的具有攻击时间约束的制导律(ITCG),产生初始的猜测控制量。文献[7]将具有终端时间约束的导引问题转化为线性化系统的最优控制问题,得到导弹的控制量为
(6)

(7)
式中:kv=vt/vm。
2.2 基于MPSP的协同制导律设计
ITCG可以令导弹在理想攻击时间t*时刻命中目标,但是,此时并不满足攻击角度的约束。将此时的控制量作为初始猜测控制量,基于MPSP对初始控制量进行不断调整,直到满足末端约束YN→YN,d,则得到能够同时控制导弹的攻击时间和攻击角度的制导律指令。
式(3)所示的归一化后的导弹非线性运动方程组可表示为
(8)
式中:X=(xmnymnθmn)T,U=amn。采用欧拉法对式(8)进行离散化并考虑Yk=Xk,得到:
(9)
式中:k表示第k步,k=1,2,…,N;h为积分步长。MPSP预测-校正制导的原理是:利用现有的状态量和控制量,来获取新的控制量,使得最终的输出YN无限接近期望的终端值YN,d。
定义末端时刻输出量偏差ΔYN=YN(tf)-YN,d(tf),将YN在YN,d处进行泰勒展开并忽略高阶项,可得到:

(10)
由于本文中有Y=X,因此,
(11)
根据式(9),可写出在第k+1步的误差为
(12)
式中:dXk和dUk分别为第k步的状态量误差和控制量误差,且
(13)
式中:
(14)

Fk对Uk的偏导数为
(15)
式中:
令k=N-1,由式(12)得到dXN,再将其代入式(10),得:
(16)
式(16)中的dXN-1可以根据式(12)由N-2时刻的控制变量和状态变量偏差确定,dXN-2可以以dXN-3和dUN-3的形式展开,以此类推,直到k=1,得:
dYN=AdX1+B1dU1+B2dU2+…+BN-1dUN-1
(17)
式中:
A
Bk
BN-1
(18)
k=1,2,…,N-2。因为状态变量的初始值是确定的,所以第一步的状态变量误差为0,即dX1=0。于是式(17)写为

(19)

(20)
(21)
敏感矩阵Bk可以写为
(22)
由式(20)~式(22)可知,敏感矩阵可以逐步迭代求解出来。
如果终端误差不满足要求,MPSP方法引入最优控制理论对控制量进行校正,然后重新预测终端状态。式(19)中含有N-1个未知变量和3个方程,且通常3≤N-1,方程组的解是不唯一的,因此采用最优化理论求得使某设定的性能指标最小的解。设性能指标函数为
(23)
(24)
式中:
所以在k=1,2,…,N-1时更新后的控制变量为
(25)
MPSP算法将动态优化问题转化为静态优化问题进行求解,使优化问题大大简化,计算效率大幅度提升,基于MPSP设计的协同制导律可实现在线计算。
综上,基于MPSP的协同制导律的实现流程为:

②基于猜测控制量,采用Runge-Kutta方法对导弹状态变量微分方程组进行积分,即进行预测;
③计算末端输出状态YN,根据指定的末端约束YN,d,求出偏差dYN,如果大于设定的门限值则进入下一步,否则退出循环,将此刻的控制量作为理想的控制信号;
④根据式(11)、式(14)、式(15)及式(18)采用递归的方法计算敏感矩阵Bk,k=N-1,N-2,…,1;
⑤计算Aλ和bλ;
⑥根据式(24)和式(25)计算dUk并更新控制变量Uk,将此时的Uk作为猜测控制量,然后返回第②步,这一步即是对控制量进行调整以缩小末端的偏差。
3 仿真结果及分析
假设有4枚导弹(导弹a、导弹b、导弹c、导弹d)协同攻击目标,其运动速度均为300 m/s,各自的初始位置及初始航向角如表1所示。
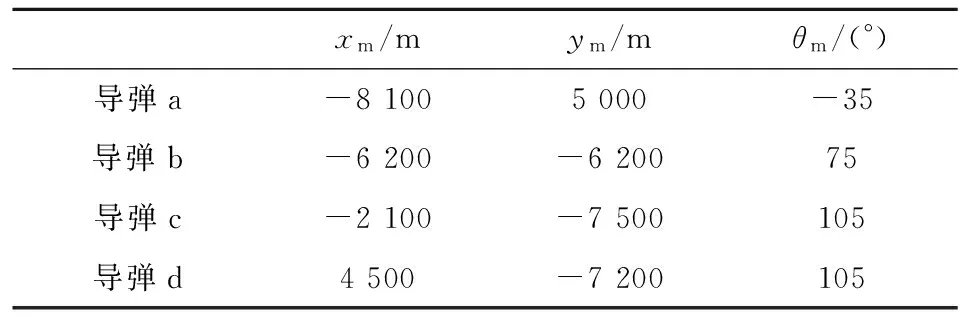
表1 4枚导弹的初始参数
3.1 攻击不同目标时的协同制导律验证
假设分别攻击静止的目标1、做vt=20 m/s直线运动的目标2和做蛇形机动(vt=20 m/s,at=10sin(0.6t))的目标3,为了增强对目标的攻击能力,指定导弹a、导弹b、导弹c、导弹d的理想攻击角分别为-90°,0°,90°,180°,即从四面同时攻击目标。
为了设置合理的理想攻击时间,首先考察当4枚导弹采用比例导引律攻击3个目标时,其攻击时间情况,如表2所示。
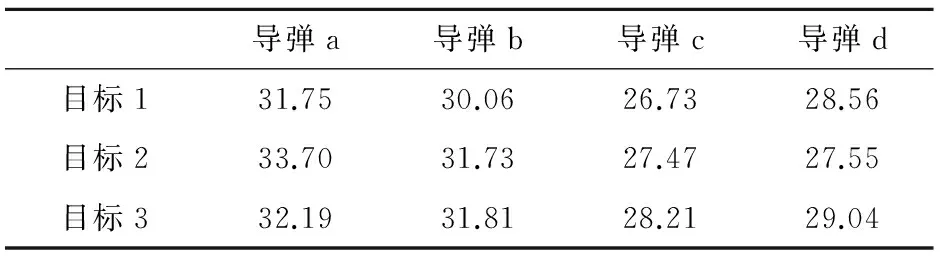
表2 PNG制导时的攻击时间 s
由于需要满足多约束,在比例导引弹道的基础上,导弹需要调整自己的弹道。因此,设定的多弹理想攻击时间应略大于每枚导弹采用比例导引律时的攻击时间。此处,设攻击目标1、目标2、目标3时4枚导弹的协同攻击时间分别为33 s,35 s和34 s。表3给出了各导弹采用ITCG攻击目标时的攻击角度情况。

表3 ITCG制导时的攻击角度 (°)
采用ITCG攻击3类目标时,各个导弹都实现了在给定的理想攻击时间且几乎同一时刻命中目标。但此时的攻击角度(如表3所示)和理想攻击角度还有较大的差距。
将基于MPSP的协同制导律应用于4枚导弹,则它们分别采用PNG、ITCG以及基于MPSP的协同制导律攻击3个目标的轨迹如图2~图4所示。
由图可见,分别采用PNG、ITCG和基于MPSP的协同制导律,4枚导弹都命中了目标。但是采用PNG时,其攻击时间和攻击角度均不满足约束;采用ITCG时,导弹在指定的攻击时间命中了目标,但是3种情况下的攻击角度并不满足约束。基于MPSP的协同制导律则实现了对攻击时间和攻击角度的同时控制。导弹采用PNG时的弹道比较平直;采用ITCG时,导弹需绕路来满足攻击时间的约束,弹道相对弯曲。基于MPSP的弹道则在ITCG弹道的基础上做进一步调整,以满足末端攻击角度的约束,图4的局部放大图显示了4枚导弹在末端实现了对机动目标的全向协同攻击,验证了基于MPSP的协同制导律的良好性能。
以导弹a攻击目标2为例,给出导弹按照3种制导律飞行时的状态量及控制量变化情况,如图5和图6所示。
由图5和图6可见,PNG的控制量比较平缓,攻击时间和攻击角度都不满足约束。采用ITCG时,由于开始时预估剩余飞行时间与理想剩余飞行时间相差比较大,因此,为了实现理想攻击时间,在前一段,导弹的控制量较大、航向角变化较大,弹道较弯曲,最终实现了理想攻击时间35 s,但是末端的攻击角度距离理想的攻击角度还有很大的差距。而基于MPSP的制导律则以ITCG的控制量作为初始猜测控制量,对其不断迭代更新,而且考虑性能指标函数使得控制量最小,最后使得导弹在35 s时的攻击角度达到了-90°,而且控制量也比ITCG控制量要平缓得多。
当4枚导弹协同攻击目标1时,重新指定协同攻击时间为32 s,理想的攻击角度为
(26)
式中:i=a,b,c,d;θp,i为导弹i采用ITCG时的末端攻击角度;θd,i为指定的导弹i的理想攻击角。
此时,采用3种制导律对4枚导弹进行导引,结果如图7所示,Δθ=θd,i(tf)-θp,i(tf)。
由图7可见,导弹b、c、d均以指定的攻击角度在给定的时间命中目标。但是,导弹a并未命中目标。这是因为,4枚导弹采用PNG攻击目标的时间分别为31.76 s,30.06 s,26.73 s,28.56 s,指定的攻击时间为32 s,其只比导弹a采用PNG时的时间大一点,而比其他导弹的攻击时间要大得多。因此,对于同样的攻击角度偏差-50°,导弹b、c、d可以在原来PNG弹道的基础上进行较大的调整来实现理想的攻击时间和攻击角度,而供导弹a调整的余地不大。同样的理想攻击角度,如果理想攻击时间增大为36 s,则4枚导弹均可实现在指定的时间以指定的角度攻击目标。因此,理想攻击时间和理想攻击角度的合理设定至关重要。
另外,从计算速度的角度来讲,在CPU为Intel(R)Core(TM)i7-3770 CPU @3.40GHz、内存为4GB的计算机上,采用Matlab2015a编制程序,控制量迭代更新一次的时间为0.4 s,如果采用C语言编程,计算速度会快50~60倍[15],也就是迭代一次需要花费的时间为7~8 ms。尽管一个控制步长中,算法需要迭代多次至收敛。但是可以采用“迭代展开”的概念[16],即在满足控制精度的前提下在一个步长中进行固定次数的迭代,这样就可实现MPSP协同制导律的在线计算。
3.2 协同制导律鲁棒性分析
假设在导弹某初始条件下,采用ITCG计算得到了初始猜测控制量,但实际飞行时,导弹的初始位置和初始速度受到扰动,不同于计算初始猜测控制量时的初始状态,仿真分析此时协同制导律的性能。以导弹a为例,假设导弹a在初始时刻存在速度偏差Δv0,分别为-20 m/s和20 m/s,设定理想的攻击时间为36 s,理想的攻击角度为-90°,与无扰动(Δv0=0)的情况进行对比,仿真结果如图8所示。
由图8可见,3种情况下,导弹均以指定的角度在指定的时间命中目标。随着导弹速度的增大,弹道的弯曲程度增大,这是因为:为了能以相同的攻击时间和攻击角度命中目标,速度大的导弹需要绕道飞行,随着飞行速度的增大,导弹绕的路增多,因此弹道更为弯曲。
假设导弹的初始位置存在偏差有(Δx0,Δy0),分别为(-0.1x0,-0.1y0)和(0.1x0,0.1y0),同样设定t*=36 s,θd,a=-90 °,对比无位置扰动时的情况,仿真结果如图9所示。
由图9可见,在导弹初始位置存在上述偏差的情况下,采用基于MPSP的协同制导律,导弹仍然以指定的攻击角度在指定的时间命中目标。Δx0=0.1x0,Δy0=0.1y0时,导弹初始位置距离目标最远,达到本算例中指定的攻击时间和角度时,其绕的路比较少,因此弹道弯曲程度较小,弹道较平直。
由上可见,在存在初始速度干扰和初始位置干扰的前提下,针对合理设置的理想攻击时间和攻击角度,基于MPSP的协同制导律具有良好的鲁棒性。
当Δx0=0.1x0和Δy0=0.1y0时,假设理想攻击时间减小为35 s,这时基于MPSP的协同制导律迭代100次都无法收敛。这是因为:此时导弹采用比例导引律时的飞行时间为34.92 s,其非常接近理想的攻击时间35 s,而经过计算可知此时要求的需调整攻击角度Δθ=90.62°,这时基于MPSP的制导律无法在如此小的时间裕度下调整弹道使其同时满足攻击时间和攻击角度的要求,因此,算法不收敛。增大t*为36.5 s,则算法迭代10次后即收敛。由此可见,t*和θd,i的设置对基于MPSP的协同制导律的性能影响很大,需综合考虑初始位置、速度、可用过载等条件来设定。一般来讲,可按照以下方法设定:
①考虑多导弹的突防效果和对目标的打击效果,设定理想的攻击角度θd,i;

(27)


(28)
式中:tg,i是为了调整攻击角度而设的时间裕度,其根据期望末端攻击角与ITCG制导律的末端攻击角的差而设定,如偏差大,则较大,反之则可设较小的值。
④最后,针对多枚导弹协同作战的情况,选择协同攻击时间t*为
(29)
n为参与协同攻击的导弹数量。
在一定攻击角度约束的前提下,如果理想攻击时间设得太小,则可能出现导弹根本来不及调整自己的飞行状态来满足攻击时间和攻击角度约束的情况,因此,理想攻击时间设得比较大,更有利于协同作战的进行。但是,出于导弹能量消耗的考虑,t*也不能设得太大,可按照上述方法来合理设定理想的攻击角度和协同攻击时间。
4 结束语
针对多枚导弹协同攻击目标的情况,将ITCG制导律和MPSP技术相结合,提出一种在满足脱靶量要求的前提下能够同时控制弹群攻击时间和攻击角度的协同制导方法。针对攻击不同运动形式的目标、导弹受到不同扰动的情况,对协同制导律进行了仿真验证。相对于前人所做的工作,本文的研究结果为:
①所提出的协同制导律不仅能够同时满足脱靶量、攻击时间、攻击角度约束,而且对于运动目标以及导弹的运动状态受到干扰的情况,也是适用的,即制导律具有良好的性能和广阔的应用前景;
②所提出的协同制导律具有计算复杂度低、计算效率高的特点,可用于在线实现;
③综合考虑理想攻击时间和理想攻击角度对协同制导律性能的影响,给出了两者的设定方法。
[1] ATES U H.Nonlinear impact angle control guidance law for stationary targets[C]//AIAA Guidance,Navigation,and Control Conference.San Diego,California:AIAA,2016:2 016-2 112.
[2] WANG X,WANG J.Partial integrated guidance and control with impact angle constraints[J].Journal of Guidance Control Dynamics,2014,38(5):925-936.
[3] TEKIN R,ERER K S.Switched-gain guidance for impact angle control under physical constraints[J].Journal of Guidance Control & Dynamics,2015,38(2):205-216.
[4] JEON I S,LEE J I,TAHK M J.Impact-time-control guidance law for anti-ship missiles[J].IEEE Transactions on Control Systems Technology,2006,14(2):260-266.
[5] CHO N,KIM Y.Modified pure proportional navigation guidance law for impact time control[J].Journal of Guidance Control & Dynamics,2016,39(4):1-21.
[6] LEE J I,JEON I S,TAHK M J.Guidance law to control impact time and angle[J].IEEE Transactions on Aerospace & Electronic Systems,2007,2(1):852-857.
[7] KANG S,KIM H J.Differential game missile guidance with impact angle and time constraints[J].IFAC Proceedings Volumes,2011,44(1):3 920-3 925.
[8] ERER K S,TEKIN R.Impact time and angle control based on constrained optimal solutions[J].Journal of Guidance Control and Dynamics,2016,39(10):1-7.
[9] HARL N,BALAKRISHNAN S N.Impact time and angle guidance with sliding mode control[J].IEEE Transactions on Control Systems Technology,2012,20(6):1 436-1 449.
[10] KIM T H,LEE C H,JEON I S,et al.Augmented polynomial guidance with impact time and angle constraints[J].IEEE Transactions on Aerospace & Electronic Systems,2013,49(4):2 806-2 817.
[11] PADHI R,KOTHARI M.Model predictive static programming:a computationally efficient technique for suboptimal control design[J].International Journal of Innovative Computing Information & Control Ijicic,2009,5(2):399-411.
[12] KUMAR P,BHATTACHARYA A,PADHI R.MPSP guidance of tactical surface-to-surface missiles with way-point as well as terminal impact and body angle constraints[C]//IEEE International Conference on Control Applications.Hyderabad,India:IEEE,2013:865-870.
[13] 李辕,赵继广,白国玉,等.基于预测碰撞点的剩余飞行时间估计方法[J].北京航空航天大学学报,2016,42(8):1 667-1 674.
LI Yuan,Zhao Ji-guang,Bai Guo-yu,et al.Method of time-to-go estimation based on predicted crack point[J].Journal of Beijing University of Aeronautics & Astronautics,2016,42(8):1 667-1 674.(in Chinese)
[14] BRYSON J.Applied optimal control[M].Waltham,MA:Hemisphere Pub.Co,1975.
[15] SARMAH P,CHAWLA C,PADHI R.A nonlinear approach for re-entry guidance of reusable launch vehicles using model predictive static programming[C]//16th Mediterranean Conference on Control and Automation.France:IEEE,2008:41-46.
[16] MCHENRY R L,LONG A D,COCKRELL B F,et al.Space shuttle ascent guidance,navigation,and control[J].Journal of the Astronautical Sciences,1979,27(1):1-38.
ACooperativeGuidanceLawWithConstraintsofImpactTimeandImpactAngle
WANG Xiao-fang,WANG Zi-yang,LIN Hai
(School of Aerospace Engineering,Beijing Institute of Technology,Beijing 100081,China)
To realize the saturation attack to the target from different directions for multiple missiles,the nonlinear motion-models of missile and target were built and normalized.To satisfy the designated impact time and impact angle,the impact-time-control guidance law was used to produce the initial guess-control-variables,and the model predictive static programming(MPSP)technology was adopted to calculate the control variables iteratively based on the initial guess control variables until the miss distance and angle constraints were satisfied,which formed the suboptimal cooperative guidance law with the constraints of impact time and impact angle.Simulation results show that,given reasonable designated impact time and impact angle,the cooperative guidance law is of good precision and robustness,and the law is applicable to on-line optimization due to its efficiency.
multiple missiles;constraint of impact time;constraint of impact angle;MPSP
V448.133
A
1004-499X(2017)04-0001-08
2017-07-20
国家自然科学基金项目(11202024)
王晓芳(1979- ),女,副教授,研究方向为飞行力学、飞行器制导与控制。E-mail:wangxf@bit.edu.cn。
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
北京航空航天大学学报(2021年4期)2021-11-24
数字海洋与水下攻防(2020年5期)2021-01-04
中国新技术新产品(2020年19期)2020-12-25
电子制作(2019年7期)2019-04-25
北京航空航天大学学报(2017年6期)2017-11-23
小学阅读指南·低年级版(2017年1期)2017-03-13
人生十六七(2015年6期)2015-02-28
太空探索(2014年1期)2014-07-10
计算机辅助工程(2012年5期)2012-11-21