
智能检测长大桥梁
2018-01-19 17:41浙江省宁波市杭州湾大桥发展有限公司王金权肖龙
中国公路 2017年23期
文/图 浙江省宁波市杭州湾大桥发展有限公司 王金权 肖龙
在特殊结构桥梁(如斜拉桥、悬索桥、钢管混凝土拱桥等)或者大跨高墩桥梁的检测过程中,常规检测手段存在局限性,存在检查盲区,而盲区检测效率低、难度大、危险系数高,而且检测精细度远远不够。因此,采用先进的无人智能检测技术开展养护检测工作变得越来越有必要。文章介绍了四种在长大桥梁检测中的无人智能检测技术,包括无人机、高清摄像、缆索机器人、水下机器人。
桥梁检测主要是对桥梁外观和结构性能进行检查评定,通常对结构性能的检查是通过一系列的力学试验完成,而对其外观的检查主要依靠肉眼或者辅助工具(如桥检车、望远镜等)来检测桥梁主要构件是否出现裂缝、开裂破损、露筋锈蚀、支座脱空等病害。
随着我国公路建设里程的不断增加,大型桥梁数量增多,养护维护和检测工作的难度也不断提高。截至2016年年底,全国公路桥梁共有80.53万座,长度4916.97万米。特大桥梁4257座,大桥86178座,两者长度约占桥梁总长的61.1%。
对于特殊结构桥梁(如斜拉桥、悬索桥、钢管混凝土拱桥等)或者大跨高墩桥梁来说,常规检测手段存在局限性,存在检查盲区,而盲区检测效率低、难度大、危险系数高。如对斜拉桥拉索的检测,人工爬上拉索向下进行检测作业,不仅效率低、难度大、危险系数高,而且检测精细度远远不够,而采用缆索机器人检测拉索能很好地解决这个问题。为了保证桥梁的使用安全和有效消除质量问题隐患,采用先进的智能检测技术开展养护检测工作变得越来越有必要。以下主要介绍无人机检测技术、高清摄像检测技术、缆索机器人检测技术、水下机器人检测技术四种无人智能检测技术。

常用于桥梁检测的八旋翼无人机
无人机“看病”
无人机桥梁快速检测系统主要由无人机、数据传输系统、任务荷载系统、地面站系统、其他设备等组成。无人机一般采用起降平稳的多旋翼无人机,利于数据采集和观测。数据传输系统用于系统控制信号、检测数据的传输。地面站系统则用于实时监控无人机飞行、检查拍摄情况,利于及时纠正飞行轨迹、发现桥梁明显病害。其他设备除了常规的维修保养工具外,还包含检测结果分析处理系统。用于桥梁检测的无人机与常规航拍无人机的任务荷载系统略有不同,前者的三轴增稳云台、高清摄像机置于飞行器上方,航拍用云台一般布置在下方。
无人机检测方法

无人机检测钢桁梁和桥塔
无人机检测一般由2名专业技术人员分别控制机身运动、检测摄像2部分进行飞行和数据采集。起飞前,无人机需放置平稳,调试各系统确保开机运行正常后,统一指令调度起飞。在飞行过程中,根据检测对象的差异控制不同的安全距离。桥墩和塔柱一般控制在5米左右,缆索和钢构件等地形复杂部位一般控制在10米左右,具体安全距离需结合现场情况确定。无人机空间位置信息、摄录画面实时显示在地面站系统的监控屏幕上,检测人员根据监控初步判断检测对象是否存在病害。若存在,检测人员根据病害程度,选择无人机悬停进行局部高清拍照或继续前进。无人机飞行控制、摄像系统采用无线传输信号进行控制,检测系统采集数据存储在无人机机身,有效避免长距离无线传输引起的数据衰减或干扰。
无人机特点
相比传统桥梁检测技术,无人机检测技术具有直接到达检测部位,无需其他辅助措施,节省费用;检测桥墩、桥座、桥腹等危险场所,无需搭架或者吊篮配合人员检测,极大地提高了安全性;对于部分无法企及的桥腹、拉索等部位,无人机可以抵近观察了解更多细节;定点悬停观测、实时传输画面、效率高、基本不影响正常交通;在天气情况允许的前提下,实施检测桥梁具备较高的及时性。
目前,无人机检测也存在不足,比如梁体狭小空间处无法检测,需传统检测方式;续航能力一般;工作环境受天气环境影响大。
高清摄像“把脉”
高清摄像综合使用了摄影测量与图像识别技术,从影像中提取待病害位置、尺寸等信息。高清摄像系统主要由摄像部分、成像放大部分、转动控制部分及图像处理分析部分等四部分组成。
摄像部分,主要用于现场拍照,将病害以图像的形式记录下来;成像放大部分,使用高倍率的望远镜头,对拍摄的病害进行放大处理,使图像满足检测精度要求;转动控制部分,将拍摄区域网格化处理,转动控制部分可自动将镜头对准待拍摄区域,大幅度提高拍摄速率;图像处理分析部分,首先将斜视图像转换为正视图像,而后使用先进的图像处理技术,识别出病害长度、宽度等尺寸信息。
高清摄像技术主要应用于高耸结构物的表观检测,如桥梁、火电站冷却塔、水坝、核电站反应壳等。在长大桥梁检测中,高清摄像技术多用于斜拉桥、悬索桥的索塔外观检查和不易检测到的桥梁侧面底面等。
高清摄像机具有以下优点:
操作简单快捷

高清摄像的摄像部分

高清摄像机整体

索塔高清摄像检测

主梁底面和侧面高清摄像检测
设备总重不超过15公斤,现场2人即可顺利操作。从开箱到组装完毕,总共不超过10分钟。
检测精度高
50米距离范围内,高清摄像有效精度可达到0.1毫米。
安全可靠
操作人员在陆地空旷区域拍摄,避免在支架或挂篮上登高作业,有效保证检测人员的人身安全。
不干扰结构物的正常运营
该方法为非接触性量测手段,不干扰被测物自然状态。例如,桥梁检测中无需封路,避免了道路审批的繁琐办理流程。
拍摄影像可长期保存
影像信息便于与历史信息进行对比,掌握病害的演变规律。
展示效果好
检测结果以高清漫游的方式呈现出来,还原现场,犹如身临其境。
缆索机器人“会诊”
缆索是斜拉桥的主要承重部分,其造价约占全桥造价的25%至30%。但其长期暴露在大气之中,受到风吹、日晒、雨淋和环境污染的侵蚀,其表面会受到较严重的破坏,这会对整座斜拉桥带来不利的影响。然而,大型斜拉桥缆索都存在安装后难以进行健康检测的问题,存在严重安全隐患。为了降低安全隐患,必须对桥梁缆索进行定期的检测,并对其中有损伤的缆索进行涂装、修复或更换。
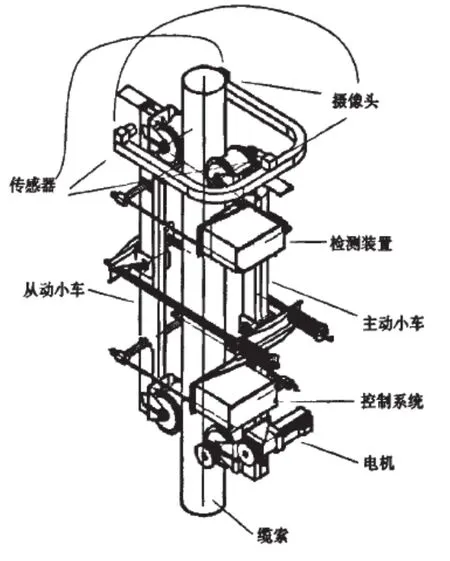
缆索机器人安装示意图
缆索机器人是一种能够携带相关设备攀爬缆索并对完成高空作业的爬行机器人,它是专门针对高空斜拉索进行设计和应用,能够实现缆索准确、及时、快速、方便地检查。利用其作为载体,安装高清摄像装置和钢丝探伤传感器,能进行缆索外观和内部钢丝情况的详细检测。
检测机器人从整体上包括检测装置、爬行机构、控制系统、电源、电机等部分。
检测装置的作用是检测桥梁缆索外表及内部是否有损伤,可以是电涡流检测装置、磁漏检测装置、超声波检测装置等。检测的结果由控制和监视系统负责采集并存储。
爬行机构是机器人的驱动系统,它的任务是带动整个机构按设定的任务自主地在缆索上运动。
控制系统是整个系统的中枢,它要完成同地面操作人员的通讯、采集检测装置检测的结果、控制并驱动爬行机构按照要求运动。

缆索机器人检测现场
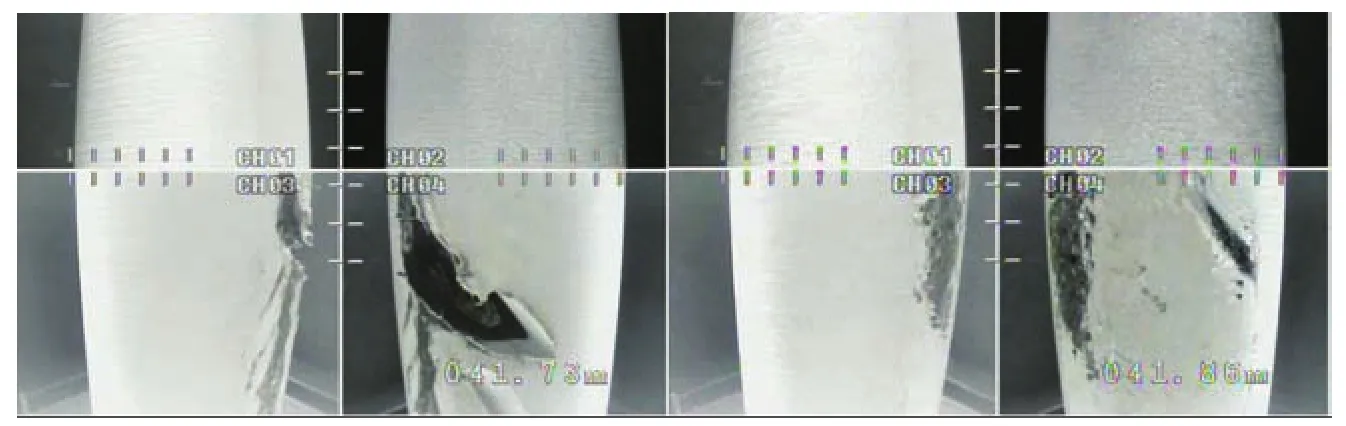
缆索机器人检测到的斜拉索破损
应用缆索机器人检测斜拉索,检测过程不需封桥,不影响桥梁正常通行;还能够检测到高空段人工无法检测到的斜拉索部位,检测更详细;检测中,机器人负责测量过程的数据采集,操控人员负责安装和控制,大大减轻了检测人员的工作量,且安全性高。
水下机器人“探秘”
桥梁基础是桥梁的重要结构之一,它不仅承受着桥梁的恒载和活载,还将传递给地基。桥梁经过一段时间运营后,往往会因为基础混凝土浇筑质量差或流水长期冲刷侵蚀等原因而出现病害,如基础淘空、倾斜、下沉、混凝土冲蚀、磨损、破损、露筋、锈蚀、夹泥、开裂和缩径等,这些病害均会危及桥梁的正常使用。由于基础往往位于水面以下或埋置在土体之中,成桥后,基础顶面以上已修筑墩台、梁板等结构物。另外,基础位于水面底下,人工检测作业存在很大的安全隐患。这些现实情况给桥梁检测的顺利实施带来了很大的困难,检测单位无法及时了解成桥后基础的病害情况。针对上述状况,使用水下机器人检测桥梁基础成为长大跨海、跨江桥梁桩基检测的必要手段。
水下遥控机器人(英文缩写ROV)潜水有多种,通常可分为小型观察型和作业型两种。按动力范围和作业水深分类,作业型又可分为轻型、中型、大型和超深型几种。目前在水下遥控机器人的基础上,已经研制成功更为先进水下LBC多功能运动车,是ROV和水下爬行器的完美结合,它除了具有普通ROV的功能外,还具有爬行器功能。如果需要仔细观察某一个平面物体,LBC能转换到爬行器模式,借助四个轮子在平面上自由爬行,可以仔细检查物体表面。在水下爬行时,显示器上会显示里程表。另外,还具有成像声纳和水下定位系统。检测人员应根据不同的检测环境以及检测目的选择合适的水下机器人。


水下机器人及其组件
水下机器人检测作业的优点在于能深水检测,这是水下摄像仪检测以及潜水检测无法比拟的优势;缺点是目前水下机器人的推进器动力不足,一般水下检查作业型的抗水能力是2节至4节。因此,检查型的水下机器人目前适合于流速较低的跨海桥梁以及库区桥梁的基础检测,对于流速较大的桥梁基础尚不能完成检测任务。
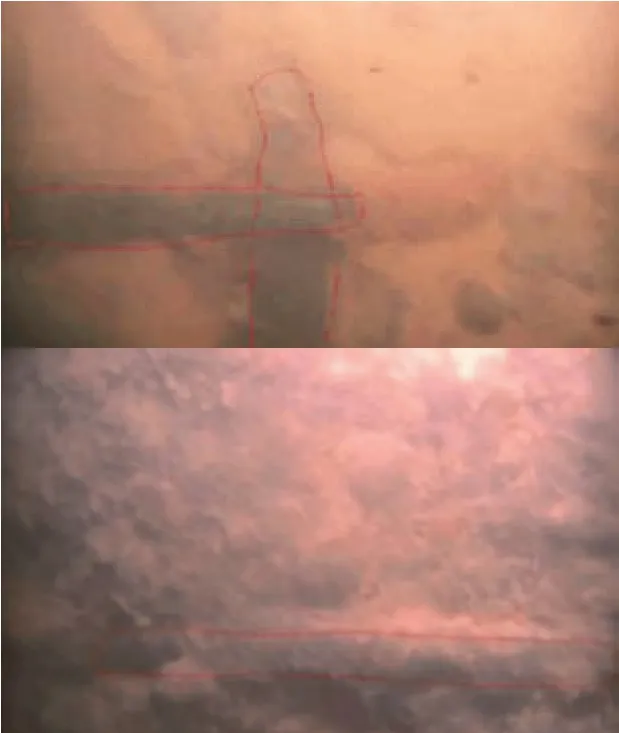
水下机器人检测照片
展望
随着社会科技水平的不断提高,应用在桥梁检测领域的检测方法和手段也逐步智能化。采用桥梁智能化检测技术能够保障桥梁结构在运营过程中的安全性,确保使用者的生命财产安全。在科学技术、人工智能飞速发展,逐渐普及的今天,已经有越来越多的新型智能化检测技术运用于桥梁检测养护工作中。有关单位应当对这些信息技术加强了解,结合实际情况,合理、科学的引入,提升桥梁检查工作的有效性。
猜你喜欢
军事文摘(2022年24期)2022-12-30
交通科技(2022年6期)2022-12-29
建材发展导向(2022年12期)2022-08-19
科学技术创新(2022年18期)2022-06-24
中国公路(2022年3期)2022-04-13
城市道桥与防洪(2022年1期)2022-02-25
学苑创造·B版(2021年2期)2021-03-15
家庭影院技术(2019年4期)2019-04-17
小朋友·聪明学堂(2016年7期)2016-05-14
现代商贸工业(2016年35期)2016-04-09
