
微位移的直射式激光三角法精密测量*
2018-04-10 07:35吴慎将郝冬杰
西安工业大学学报 2018年1期
范 源,吴慎将,郝冬杰
(西安工业大学 光电工程学院, 西安 710021)
非接触式、数字式和响应灵敏的现代化激光三角测距法被广泛的应用在测量行业中[1].三角法测距是指在被测物体表面上方,在一定的角度方向上用一束激光来发射,激光在物体表面发生反射或者散射[2];在另一个角度用成像系统来接收反射或散射光,最后汇聚在屏幕上成像,照射在被测物体表面上的激光产生的光斑位置一旦发生改变,光反射或散射的角度也会随之改变[3].但随着工业技术的发展,对微小位移检测的要求越来越高,高精度、小型化和智能化成为三角测距的发展方向[4-5].文献[6-8]比较了几种常用的充分利用光斑附近众多信息的线阵(Charge Coupled Device,CCD)亚像素细分算法,并通过对采集的光斑图像进行离线分析和处理,对这些算法做了分析、比较和改进,找到了一种精度较高且便于硬件实现的相对最优的算法——倍频插值的灰度质心算法,显著地提高了系统的定位精度和稳定性,但是存在测距精度低,算法复杂,价格昂贵等问题.文献[9-14]在测量微小位移的试验中,使用了位置传感器(Position Sensors Detector,PSD),其原理是在位置传感器上的光斑成像的位置发生移动,即当被测物体沿激光方向发生移动时,PSD上受光面的光斑就会随之移动,经过上位机多次采集和处理,采用曲线拟合的方法找出光斑位移与物体实际距离的对应关系,从而间接实现激光测距,为微小位移的测量提供了理论基础[9-13].
本文基于直射式激光三角测距原理,采用半导体激光器(带有准直透镜)和位置传感器对微小位移进行非接触测量,提出了微位移的曲线拟合插值测量法,对测距误差进行分析和校正,实现了对微小位移的精确测量,以期为微小位移精密测试领域的研究工作提供技术参考.
1 直射式激光三角测距原理
直射式激光三角法光路图如图1所示.激光器发射的激光经过准直透镜准直出来的光束与法线成90°入射到被测物体表面,用成像透镜接收被测物体的杂散光,经滤光片,由PSD受光面接收采集.激光器发射光束垂直入射到测量面,反射光束BB′与激光入射光束夹角为α,PSD与水平夹角w=20°,激光器与PSD中心间距为p,激光照射到参考面位置点为A,参考面反射光照射到PSD上的位置为A′,PSD接收装置与反射光束AA′的夹角为β,α和β需满足三角法ScheimpfIug条件[14],即在接收光学部分,α=41°;入射光到成像透镜中心o点的距离AO即物距为L1=147.5 mm,光从透镜垂直出射在PSD接收装置上,OA′即像距和随参考面移动距离L2为45 mm,光斑在PSD接收装置上移动的实际距离为S,透镜焦距为f=25 mm.激光照射到实际面位置B和实际面反射光照射到PSD上的位置为B′点,分别作反射光束A′A和AA′延长线的垂线,垂足分别为C和D,其中L为物体移动距离.
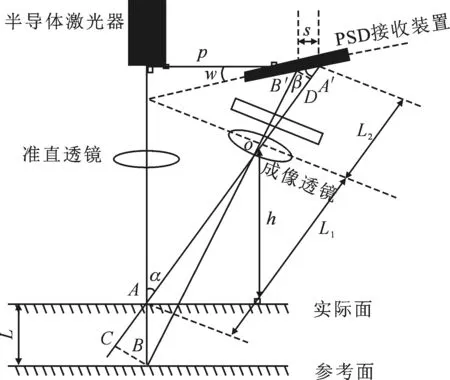
图1 直射式激光三角光路图
由相似三角形原理可知,
(1)
且B′D=S×sinβ;DA′=S×cosβ;BC=L×sinα;AC=L×cosα;AB=L,
由高斯成像公式[15]可得
(2)
式中:l为物距,且l=L1;l′为像距,且l′=L2;f为准直透镜焦距.
当入射光在参考面上时,代入式(2)可得
将L2代入式(1)求得移动距离L,即,当实际面在参考面下时,
(3)
当实际面在参考面上时,
(4)
2 系统构建
利用PSD接收光源信号得到两路电流信号,引出经过电流转电压电路(I/V转换电路),将采集的信号最终转换为电压信号,经过放大电路,转换后的两路电压信号通过滤波电路,滤除干扰信号和低频部分,送入A/D模数转换电路二值化处理,上传到单片机.单片机控制驱动显示电路在LCD液晶显示屏上显示结果.信号处理放大电路采用三运放结构的仪表放大器芯片AD822,它主要应用于精确应变测量,具有低漂移和高共模抑制比,既可单电源供电也可双电源供电,双电源供电电压范围为2.3~18 V,特别适合±10 V输入电压的应用.采用STM32F103系列单片机12~36 V供电,最高工作频率为72 MHz,2.0~3.6 V的电源供电和I/O输入输出接口的驱动电压.3个12位的μs级A/D模数转换器(16通道),其测量范围为0~3.6 V,具有双采样和保持能力,需要转换电压电路.
电路部分以STM32F103RCT6单片机为核心的控制电路,包括PSD驱动电路、信号处理电路和显示电路,基本满足系统测量精度和在线检测的要求.系统电路框图如图2所示.
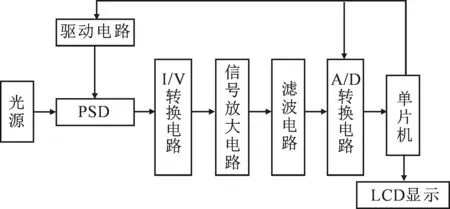
图2 测距系统电路框图
电路实现的功能如下:① 系统能够实现距离测量与数据传输功能.② 在10~100 mm 距离范围内,测量不同距离.测量距离是指目标与测量显示发射模块之间的直线距离.③ 结果数据通过光通信后显示.
在底板上有激光器固定座、接收透镜座和PSD传感器支座.激光器固定座上固定激光器和准直透镜;接收透镜座上固定滤光片和成像透镜;PSD传感器支座上固定PSD位置传感器.当入射光垂直入射到被测面时,L1tanα=L2tanβ,从而确定AL0650P2型尾纤型激光器、透镜和PSD-X70型PSD的相对位置;成像透镜选用双胶合消色差透镜,其焦距f′=25 mm,直径为∅10 mm,采用Z-MAX软件校正球差、慧差等近轴向色差;确定系统所有模块及元器件的型号和尺寸后,紧固零件统一用M3螺钉固定在底板上.
3 测试及分析
3.1 实验数据的处理
ADC1_1和ADC1_2是采集的两路电压信号经A/D模数转换后的数据,测量10~100 mm距离,结果见表1.
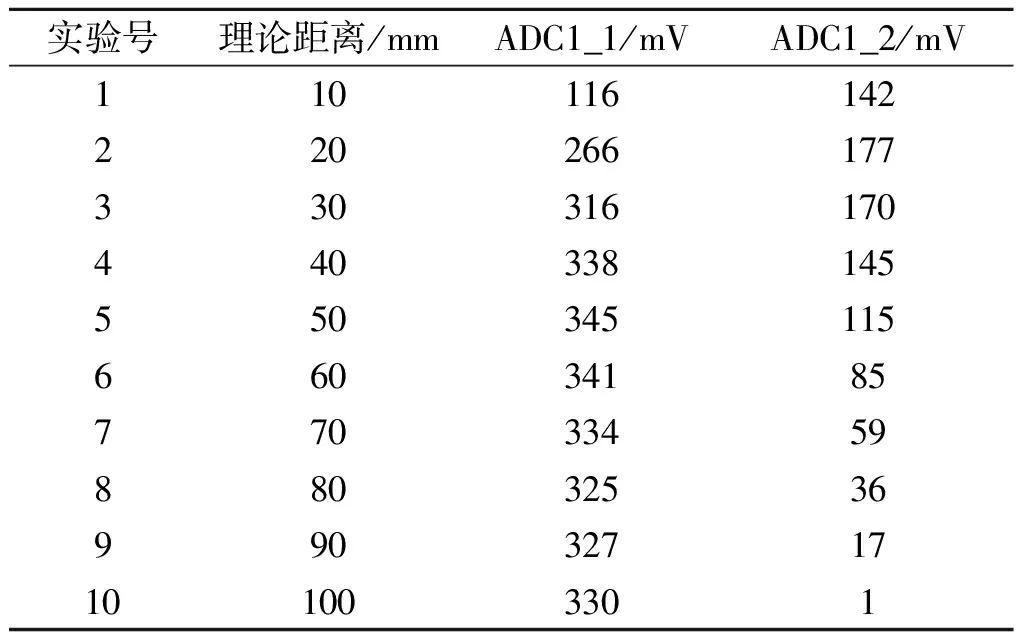
表1 两路信号散点分布
经过实验发现,当按照从PSD引出的两路电流信号经过I/V转换电路变为电压信号经采集,所得数据按照式(5)进行近似处理得到PSD的电压信号值S′,即可得到实际距离与程序算法处理之后电压信号的曲线,S′的计算表达式为
(5)
由于激光三角法测距中PSD输出信号经上述处理后与实际距离的曲线是非线性的,因此,在计算物体实际距离采用折现法来逼近[16].x为理论距离,y为实际测量值,建立xoy直角坐标系,在直角坐标系中,将采集的两路信号处理后的值分别与分割线段拐点值依次比较,找到对应区间,利用直线线段代替曲线线段,从而得到在某一位置时所对应的实际测量距离.例如,在直角坐标系中,采集到的信号经上述处理后的信号值S′落在横坐标的某一区域时,若落在被测理论距离x1和x2之间,y1和y2分别为对应x1和x2的实际距离区间分割值,计算机处理后的电压信号值S′经过分割成y1和y2,x1和x2区域内,将电压信号值S′进行分割,对应的待测物体测量距离值S为
(6)
其中x为理论距离.
本实验数据处理后所得测距仪的10组数据测量结果与实际理论距离的关系如图3所示.从图3可得,测距仪的测量值与实际测量距离在80 cm以外测量的误差较大,这是由于PSD受光面尺寸的影响,长距离测量时测量精度会降低.但是,在80 cm以内范围内线性度较好,误差值较小.
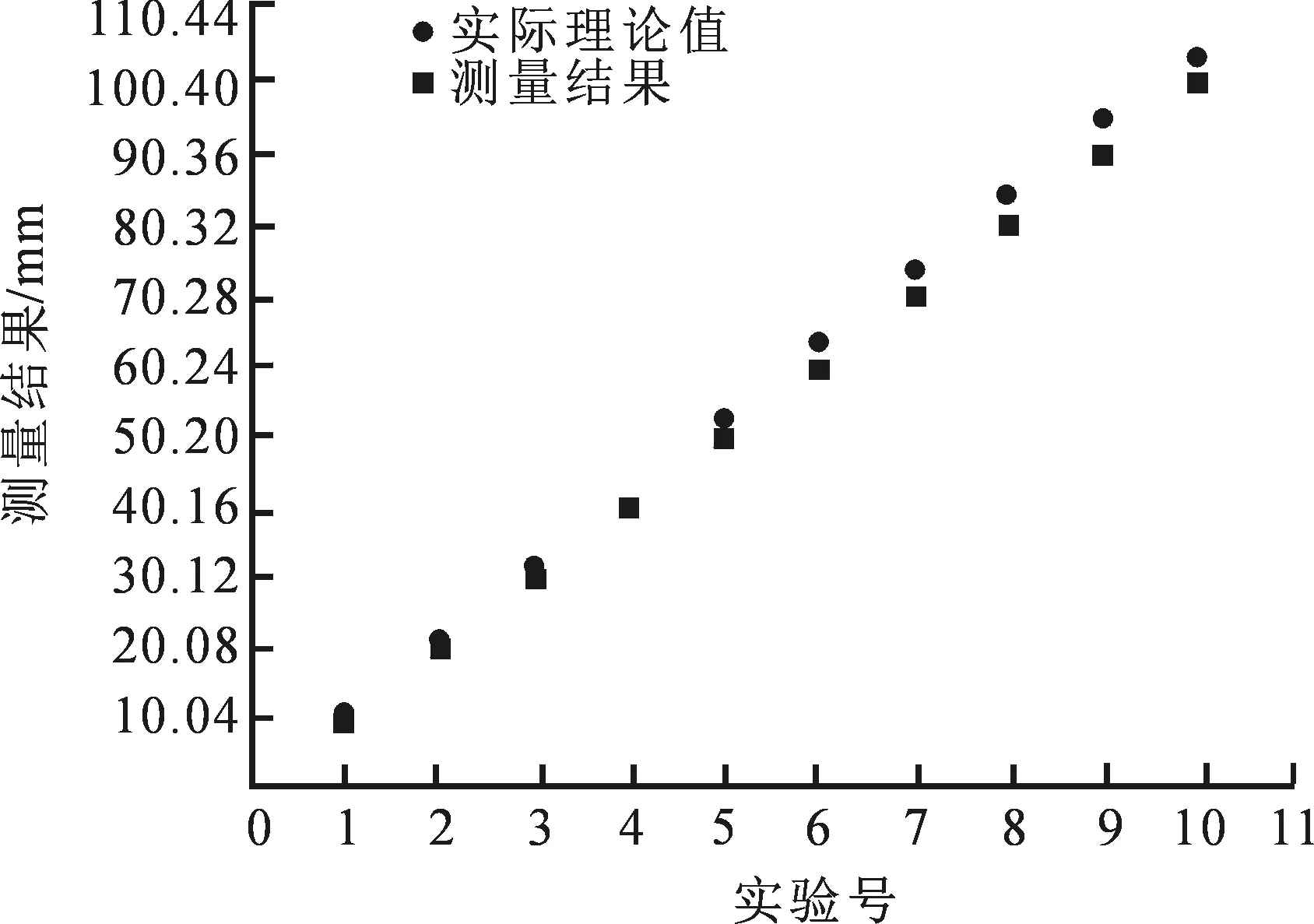
图3 理论距离与测量距离的关系
3.2 实验结果分析
实验结果的实际值与误差值的关系如图4所示.测试结果表明,在20~80 mm范围内线性度最好,误差值达到2%以内,本文设计的短距离激光三角测距仪可以实现10~100 mm的位移测量,在全量程范围内误差小于3%.同时,激光三角法精密测距系统主要是由计算机和光电子器件等组成的一个整机系统,该测距系统的系统误差来源于实物中的电子元器件的非线性特性,以及电子元器件在安装调试、测量标定以及环境温度等外部因素所产生的干扰误差,并且由于受到PSD受光面的尺寸的影响,远距离测量精度较差[17].
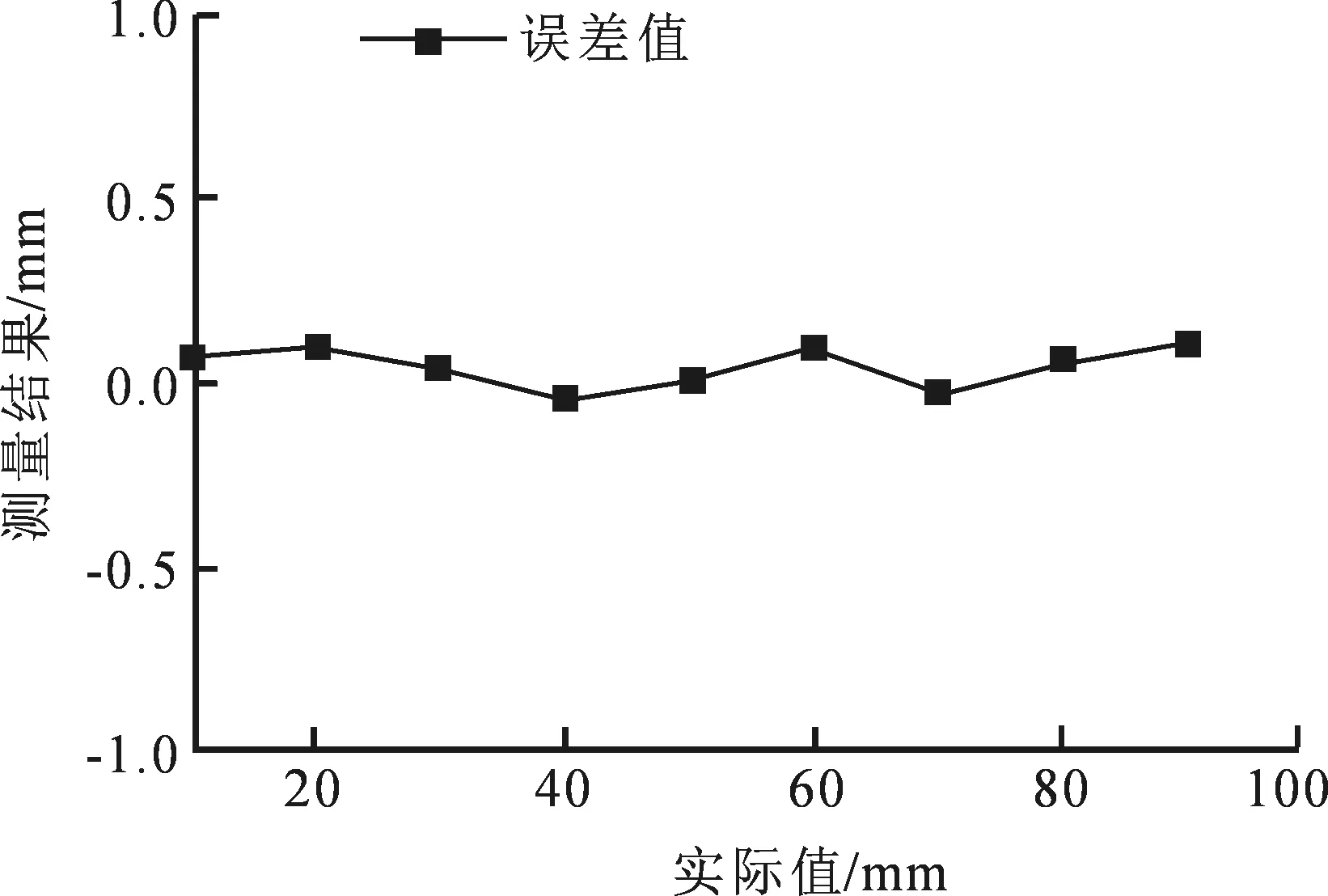
图4 实际值与误差值的关系图
4 结 论
1) 基于直射式激光三角测距原理,提出了一种微位移精密测量方法,确定了测量光路的光学结构;实现了对各模块之间的控制与通信.位移测试结果表明,激光测距仪可以实现10~100 mm的位移测量,在全量程范围内误差小于3%.
2) 激光三角法精密测距系统误差来源于实物中的电子元器件的非线性特性,以及电子元器件在安装调试、测量标定以及环境温度等外部因素所产生的干扰误差.通过联调和在试验用导轨上进行测距实验,本文为激光测距的近距离测量提供了技术参考.
参考文献:
[1]贾琦.基于三角测量法的激光位移传感器的研究[D].长春:长春理工大学,2014.
JIA Qi.Research on The System of Laser Triangulation Measuring[D].Changchun:Changchun University of Science and Technology,2014.(in Chinese)
[2]LOMBARDO V,MARZULLI T.PAPPALETTERE C,et al.A Time-of-Scan Laser Triangulation Technique for Distance Measurements[J].Optics and Lasers in Engineering,2003,39(2):247.
[3]CIGADA A,MANCOSU F.MANZONI S,et al.Laser-triangulation Device for In-line Measurement of Road Texture at Medium and High Speed[J].Mechanical Systems and Signal Processing,2010,24(7):2225.
[4]万瑾,黄元庆.激光三角法测量的研究[J].三明学院学报,2006,23(4):361.
WAN Jin,HUANG Yuanqing.Study on Laser Triangulation Method Measurement[J].Journal of Sanming University,2006,23(4):361.(in Chinese)
[5]冯金城.高精度实时激光三角测距系统设计[D].南京:南京理工大学,2008.
FENG Jincheng.The Design of a Real-time and High-Precision Laser TriangulationSystem[D].Nanjing:Nanjing University of Science and Technology,2008.(in Chinese)
[6]曹红超,陈磊,王波,等.一种改进型高精度激光三角位移传感器的结构设计研究[J].激光杂志,2007,28(6):14.
CAO Gongchao,CHEN Lei,WANG Bo,et al.The Study of a New Kind Structure of High Precision Laser Displacement Sensor Based on Triangulation[J].Laser Journal,2007,28(6):14.(in Chinese)
[7]徐俊峰.激光三角法测距系统[D].长春:长春理工大学,2012.
XU Junfeng.The System of Laser Triangulation Mersuring[D].Changchun:Changchun University of Science and Technology,2012.(in Chinese)
[8]吴振刚,高则仁.三角法非接触式直升机旋翼结冰探测技术[J].中国电子科学研究院学报,2015,10(3):327.
WU Zhengang,GAO Zeren.The Trigonometry Non-contact Ice Detection Technology forHelicopter Rotor[J].Journal of China Academy of Electronics and Information Technology,2015,10(3):327.(in Chinese)
[9]姚秋红.一维激光三角法位移测量技术研究[D].哈尔滨:哈尔滨工业大学,2014.
YAO Qiugong.Research of One-dimensional Laser Triangulation Displacement MeasurementTechnology[D].Harbin:Harbin Institute of Technology,2014.(in Chinese)
[10]侯金龙.PSD激光三角测量系统的研制[D].武汉:华中科技大学,2005.
HOU Jinlong.Research on Laser Triangulation Measurement System Based on PSD[D].Wuhan:Huazhong University of Science and Technology,2005.
(in Chinese)
[11]李党娟,吴慎将.基于AT89S52单片机的汽车尾灯控制器设计[J].国外电子测量技术,2010,29(8):60.
LI Dangjun,WU Shenjiang.The Design of the Controller on Automobile Taillight Based on AT89S52[J].Foreign Electronic Measurement Technology,2010,29(8):60.(in Chinese)
[12]齐奎洲.基于PSD的光电位移测量系统设计[D].哈尔滨:哈尔滨工业大学,2011.
QI Kuizhou.Design of Optoelectronic Displacement Measurement System Based on PSD[D].Harbin:Harbin Institute of Technology,2011.(in Chinese)
[13]李旷野.基于PSD的高精度位移传感器的研究[D].长春:长春理工大学,2010.
LI Kuangye.Study of High Precision Displacement Sensor Based Position Sensitive Detector(PSD) [D].Changchun:Changchun University of Science and Technology,2010.(in Chinese)
[14]邹振书,李喜增,张景和,等.非接触测量激光光学探头[J].光学精密工程,1997,5(3):83.
ZOU Zhenshu,LI Xizeng,ZHANG Jinghe,et al.Laser Optical Probe for Non-contact Measurements[J].Optics and Precision Engineeringg,1997,5(3):83.(in Chinese)
[15]卢凤凰.激光三角测量光学系统设计及性能分析[D].成都:西南交通大学,2011.
LU Fenghuang.Design and Performance Analysis of Laser Triangulation Optical System[D].Chengdu:Southwest Jiaotong University,2011.(in Chinese)
[16]解则晓,张宏君,张国雄.影响激光三角测头测量精度的因素及其补偿措施[J].现代计量测试,1999(1):23.
XIE Zexiao,ZHANG Hongjun,ZHANG Guoxiong.Factors Affecting the Measurement Precision of Laser Triangular Probe and the Compensation Methods[J].Modern Measurement and Test,1999(1):23.
(in Chinese)
[17]JOO K N,KIM S W.Absolute Distance Measurement by Dispersive Interferometry Using a Femtosecond Pulse Laser[J].Optics Express,2006,14(13):5954.
猜你喜欢
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
科学(2020年3期)2020-01-06
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
电子制作(2017年7期)2017-06-05
中国医疗美容(2015年1期)2015-07-12
