信息融合算法的工程应用
2018-05-18 00:55张浩峰
电光与控制 2018年5期
焦 璐, 张浩峰
(中国航空工业集团公司成都飞机设计研究所,成都 610031)
1 概述
随着科技的发展,目标机动性能不断提高、跟踪背景日益复杂、传感器技术飞速发展,复杂背景下的多传感器信息融合成为国内外学者的研究重点。信息融合是20世纪70年代出现的一门学科,目的是综合雷达、光雷、敌我识别、电子支援、情报、数据链等传感器目标数据,形成及时、准确、连续、完整和一致的战场态势,以支持战场态势预警、作战决策和火力打击,包括目标信息获取、对象估计、态势估计、影响估计、过程精炼等[1-5]。美国国防实验室联合理事会于1987年定义了JDL信息融合初步模型,2004年更新后的JDL融合模型如图1所示。
JDL信息融合5级顶层模型定义如下[6-10]。
1) 0级融合-数据预处理。处理来自传感器的信号、像素级数据,为后续融合准备数据,包括图像处理、信号处理、数据整理、单位转换等。
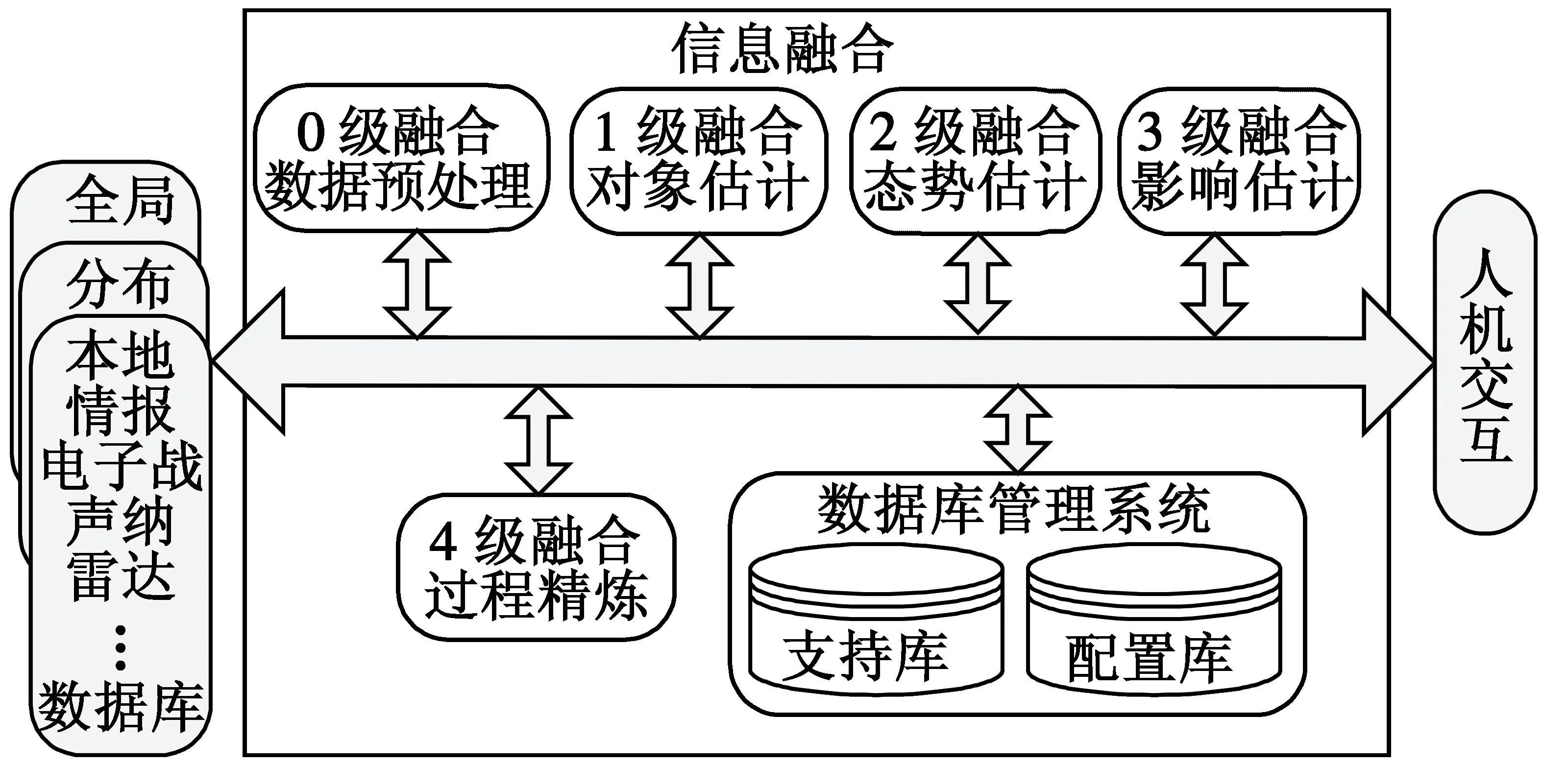
图1 JDL信息融合5级顶层模型Fig.1 Top-level model of the 5-level JDL information fusion
2) 1级融合-对象估计。融合来自多传感器的数据,以获得实体精确可靠完整的位置、运动、属性、身份估计。
3) 2级融合-态势估计。利用1级融合结果并通过融合分析,动态描述实体、事件的关系,包括目标/事件聚类相关分析。
4) 3级融合-影响估计。描述当前态势对未来的影响,包括威胁评估、我方弱点评估、结果预测、易损性评估。
5) 4级融合-过程精炼。动态监测、评估整个融合过程,调整优化融合控制参数、传感器调度以优化融合结果。
2 信息融合算法
2.1 时空对准
由于机载传感器观测坐标系、数据采样频率的不同,即使是对同一个目标的观测,各传感器得到的目标数据也有很大差别。所以,在进行多传感器信息融合时,首先要把不同平台不同传感器获得的目标观测数据进行时空对准,即把不同传感器不同时间获得的目标观测数据转换到统一的坐标系下,完成时间和空间的统一。
2.1.1 空间对准
空间对准是指将各传感器的航迹报告转换至统一坐标系下,常用的坐标系有CGCS2000坐标系、球体坐标系等。
2.1.2 时间对准
(1)
式中:Φ为选定的预测模型(匀速模型);Q为系统噪声阵。
2.2 数据关联
在分布式多传感器系统中,为了对由多个局部传感器输出的多目标航迹信息进行融合,首先需要进行“航迹-航迹”之间的数据关联,以确定哪些传感器航迹源于同一个目标。数据关联可分为统计距离计算、分簇、解关联3个步骤。
2.2.1 统计距离计算
针对待关联的2个传感器航迹,根据目标运动参数,采用衰减记忆法计算统计距离,并构建统计距离矩阵。
(2)
在di,j(k)的基础上,考虑历史信息,采用衰减记忆法定义统计量
(3)

2.2.2 分簇
如图 2所示,根据报告与航迹关联情况,将关联对划分成6类不同的簇,后续以每个簇为处理单元,这样处理可有效降低时间复杂度,提高解算效率。
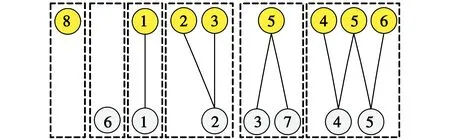
图2 分簇示意图Fig.2 Schematic diagram of clustering
2.2.3 关联解算
根据簇的形式选择解算方法,多对多情况采用拍卖算法进行最优解算;记录每个航迹对的关联成功次数mij和总的关联处理次数Mij,每次解关联运算后根据解关联结果对mij和Mij进行累加,并对每个航迹对,计算基于目标运动状态的关联成功概率
Pij=mij|Mij。
(4)
2.3 状态估计
由于涉及多个传感器的状态估计,且假设这些传感器的量测噪声互不相关,可以采用序贯滤波算法进行融合估计,且序贯滤波算法相比于集中式融合算法与并行融合算法,具有相同的估计精度。
(5)

(6)

于是当前时刻最终目标估计为
(7)
3 工程应用处理
3.1 目标方差模型
传感器目标参数的协方差或方差数据反映的是传感器量测与预估的统计结果,不能反映量测与真实目标之间的统计关系,实际应用中并不准确。并且方差在机载融合软件中运用良多,如关联门限、统计距离计算、滤波处理、传感器关联等,往往会影响融合的关联效果。为此,在工程应用中首先根据实际试飞数据进行相关数据统计工作,考虑传感器工作状态、目标密集程度、传感器探测距离、载机机动等因素,统计各类传感器在不同状态下的误差分布,从而对传感器误差进行建模,最终给出尽可能反映目标真实方差的值供融合使用。
3.2 融合参数配置
机载软件变更需要时间和周期,涉及到流程的签审,还涉及到多个架次飞机的统一安排。为提高融合验证效率,在实际试飞验证时,可将信息融合关键参数如融合树、关联门限、粗门限阈值、统计距离衰减系数等作为配置数据存贮在战术任务加载卡中,维护人员可通过地面维护设备修改融合参数以达到优化信息融合效果。
4 应用效果
仿真场景设置载机在距目标80 km处斜向进入,目标平飞,载机进行机动,采用雷达、光雷探测目标,仿真结果如图 3所示。首先,雷达与光雷关联成功,然后进行单目标跟踪。雷达探测航迹为粉色,光雷探测航迹为绿色,信息融合结果为蓝色,真实目标轨迹为红色。结果表明,信息融合关联正确,状态估计能如实反映目标运动轨迹,跟踪精度满足系统使用要求。
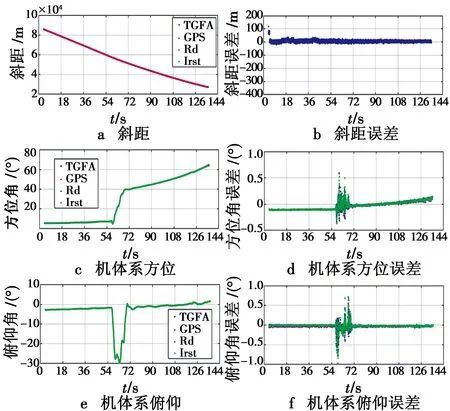
图3 仿真验证结果Fig.3 Simulation result
5 结束语
本文介绍了改进的最近邻算法、协方差交叉法、序贯滤波算法等数据关联、航迹合成、状态估计算法,给出了工程应用建议,最后通过假定场景对融合算法进行了验证。验证结果表明,本文介绍的信息融合算法可行,满足机载系统使用要求,对机载信息融合算法研究有借鉴意义。
参 考 文 献
[1] 韩崇昭,朱洪艳,段战胜,等.多源信息融合[M].2版.北京:清华大学出版社,2010.
[2] 刘同明,夏祖勋,解洪成.数据融合技术及其应用[M].北京:国防工业出版社,1998.
[3] 康耀红.数据融合理论与应用[M].西安:西安电子科技大学出版社,1997.
[4] 赵宗贵,李君灵.信息融合发展沿革与技术动态[J].指挥信息系统与技术,2017,8(1):1-8.
[5] 钟录宏,吴文,李兴国,等.多传感器目标检测的模糊信息融合技术研究[J].探测与控制学报,2003,25(2):42-45.
[6] HALL D.Assessing the JDL model:a survey and analysis of decision and cognitive process models and comparison with the JDL model[C]//Proceedings of the National Symposium on Sensor Data Fusion,Monterey,2006:122-131.
[7] ENDSLEY M R,BELTE B,JONES D G.Designing for situation awareness:an approach to user-centered design[M].New York:Taylor & Francis Group,2003.
[8] WALTZ E,LLINAS J.Multisensor data fusion[M].Norwood:Arthch House,1990.
[9] LAMBERT D A.Situations for situation awareness[C]// Proceedings of the Fourth International Conference on Information Fusion,Montreal,2001:327-334.
[10] DANIEL C,JAMES L.Possibilities for improved formal processing methods for situation assessment[C]//Proceedings of The International Conference on Multisource Multisensor Information Fusion,Las Vegas,1998:223-230.
猜你喜欢
新世纪智能(数学备考)(2021年9期)2021-11-24
青年歌声(2019年12期)2019-12-17
当代陕西(2019年15期)2019-09-02
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
学苑创造·A版(2018年11期)2018-02-01
北京航空航天大学学报(2017年7期)2017-11-24
中等数学(2017年2期)2017-06-01
读者(2017年5期)2017-02-15
北京航空航天大学学报(2016年6期)2016-11-16