
天津港智能拖轮方案设计
2018-07-18 07:43冯志东刘玉平
世界海运 2018年7期
伊 杰 冯志东 刘玉平
一、船舶智能化的发展现状
中国船级社于2015年12月1日正式发布的《智能船舶规范2015》对智能船舶进行了定义,即智能船舶就是利用传感器、通信、物联网、互联网等技术手段,自动感知和获得船舶自身、海洋环境、物流、港口等方面的信息和数据,并基于计算机技术、自动控制技术和大数据处理和分析技术,在船舶航行、管理、维护保养、货物运输等方面实现智能化运行的船舶[1]。
近年来由于智能船舶概念的兴起以及智能船舶技术的日益发展,船舶智能化已经成为全球航运的大势所趋。出于通过船舶智能化降低船舶控制和管理难度,减少人为误操作,提高设备及船舶营运的安全,优化船舶航行,控制燃油消耗、降低成本,提高收益等目的,目前智能船舶的研究与探索已在全球范围内开展。
美国斯佩里海事公司(Sperry Marine)的VisionMaster综合驾驶台系统可根据航行时的天气状况等自动规划航线以及优化油耗,并能提供远程诊断、软件更新和其他技术支持。该系统已在美国皇家加勒比游船公司最新的“海洋解放”号和其姊妹船“海洋自由”号上安装使用[2]。英国的罗尔斯·罗伊斯(Rolls Royce)公司则专注于船舶设备的远程监控。2017年10月,罗尔斯·罗伊斯与马士基集团旗下的Svitzer拖轮公司联合开发的无人拖轮在哥本哈根港进行远程操纵的视频发布,尽管该拖轮尚无法完成实际助泊作业,但它代表着未来智能船舶的一种发展趋势。此外,芬兰、挪威、日本、韩国等国家也都在船舶智能化的不同领域进行了有益探索。
作为世界最大的船舶建造国,我国也加大了对智能船舶的研发力度。2015年5月8日,国务院正式印发《中国制造2025》发展战略,其中智能船舶是《中国制造2025》中明确重点发展的领域。国家工信部为加强对船舶行业智能制造的顶层设计和系统指导,将编制发布《推进船舶智能制造指导意见》。继中国船级社发布《智能船舶规范2015》后,《船舶智能机舱检验指南》也于2017年11月6日正式生效。作为一种开放式规范和指导性文件,其与国际上智能船舶技术的发展和应用同步,为智能船舶的建造明确了方向和标准。2017年12月5日,由我国自主研制的全球第一艘智能船舶“大智”号3.88万吨散货船在上海交付使用,该船安装了全球首个能够自主学习的船舶智能运行与维护系统(SOMS),是全球首艘通过船级社认证的智能船舶,标志着我国智能船舶的建造技术达到了世界先进水平。
智能船舶的出现,将彻底颠覆现有的航运技术和管理体系,是现代航运的划时代革命。船舶的智能化时代已经渐行渐近……
二、天津港智能拖轮的方案设计
1.天津港智能拖轮项目介绍
天津港智能拖轮项目包括2艘2 354千瓦全回转拖轮和2艘2 942千瓦全回转拖轮。其中2 354千瓦拖轮主要用于恶劣天气的人员接送、海上破冰、沿海拖带和港口助泊,自动化程度为AUT-0,冰区等级为CCS ICE CLASS B3。2 942千瓦拖轮主要用于港口助泊、海上消防和沿海拖带,冰区等级为CCS ICE CLASS B,消防等级为FiFi 1/2,采用自动化电站设计。
为了响应国家船舶智能化的发展战略,满足天津港打造“智慧港口”的需要,提高拖轮设备的安全性,减少船舶工作人员的劳动强度,最大限度地降低人为因素对船舶安全的影响,总结天津港拖轮管理方面的经验,并结合当今网络应用技术及数据分析技术的发展,天津港智能拖轮项目均按照中国船级社《智能船舶规范2015》和《智能机舱检验指南2017》进行设计建造。智能拖轮方案包括智能航行、智能船体、智能机舱、智能能效管理、智能集成平台五个部分,在现有的技术条件下满足中国船级社《智能船舶规范2015》相关章节的要求,以实现拖轮的自动化、信息化和智能化。
2.天津港智能拖轮的设计原则
以港口助泊、海上拖带、引航、护航等作业为主的轮驳企业,面对复杂的港口航行环境、良莠不齐的船员操作和管理水平以及越来越严苛的环保法案,每天思考和忧虑的不外乎三个问题:安全、经济、节能与环保。
根据英国船东保赔协会对1987年至1990年四年期间发生的近1 000起船舶严重事故的调查结果表明,在发生事故的直接原因中,属人为因素的占58%;而美国对1970至1979年10年间的13 191起船舶碰撞事故进行了一项专门研究,最后结论是:在所有事故中,有55%的事故发生的主要原因是人为失误。由此可以看出,人为失误是影响船舶安全的最大隐患。除了提高船员素质之外,提高拖轮的自动化水平,降低船舶安全对船员的依赖程度将是一种提高设备可靠性的有效途径。智能拖轮的宗旨就是通过技术手段最大限度地减少人为误操作,提高设备的可靠性和船舶营运的安全性。
香港环保署2012年的调查数据显示:船舶二氧化硫、氮氧化物排放分担率分别达到50%和32%;中国环保部机动车排污监控中心统计显示,2013年在我国港口靠泊的船舶二氧化硫和氮氧化物排放量约占全国总排放量的8.4%和11.3%[3]。而2014年由自然资源保护协会公布的《中国船舶和港口空气污染防治白皮书》又使所有的船舶企业对船舶环保问题加深了认识也承受着巨大的压力。当今的轮驳企业其拖轮动力绝大多数还是由柴油机提供,尽管普遍使用低硫的轻柴油,但柴油机的热工状态不良不仅多消耗燃油而且还会产生大量的固体悬浮微粒、一氧化碳、二氧化碳、碳氢化合物、氮氧化合物、铅及硫氧化合物的排放。船员的误操作造成的海洋环境污染也是偶有发生。智能船舶的发展应顺应“绿色船舶”的发展潮流,出于轮驳企业的社会责任感,通过拖轮的智能化来保护我们的碧海蓝天也是势在必行的。
如图1所示,天津港智能拖轮的设计原则是提高设备与船舶的本质安全。通过航行风险提示与辅助决策的支持使船舶运行更加安全,通过对设备的智能化管理与故障预警使设备运行更加可靠,通过航行优化以及设备修理由计划修理转变为视情维修使船舶管理更加经济,通过环保设计以及对柴油机热工况的优化控制使船舶使用更加环保。
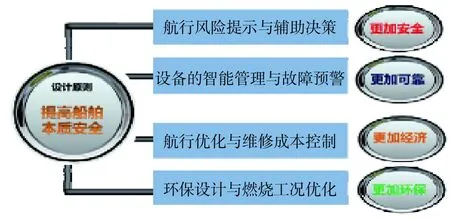
图1 天津港智能拖轮的设计原则
3.天津港智能拖轮方案的安全性
智能拖轮方案是在现有拖轮基础上新增设的一个系统,其自身的稳定性和安全性以及该系统在特定条件下对拖轮的正常运营是否会产生安全风险是我们首要关注的问题。天津港智能拖轮方案采取了如下的安全防护措施:
(1)探测器及其通信线路均具有部件损坏、短路、失电等故障的自我诊断和报警功能;
(2)智能系统采用双冗余主控制器和冗余网络结构、双UPS电力支持、离岸数据备份、身份识别与病毒防火墙等设计,以保证该系统具有较强的容灾备份和安防能力;
(3)智能系统与船舶报警系统各自独立运行,即智能系统不会影响船舶运行数据的报警;
(4)智能系统对船舶所有参数进行监测、分析、逻辑判断并提供辅助决策,并不直接参与船舶动力系统的运行控制。
4.天津港智能拖轮方案的实现方式
智能拖轮方案的实现分为五个层次,具体包括:
(1)信息采集层
信息采集层通过标准的通用智能化采集控制器与信号接口器件,通过硬连线或通信方式,与传感器、执行器、第三方设备及通信导航设备连接,并将各种不同的信号进行编译转换,转换成统一格式的数字信号,便于统一存储及应用。
(2)数据存储层
通过实时数据库及历史数据库,对采集层的信息进行存储。同时,相关的过程处理信息(程序、数据、参量等),也作为数据进行存储。系统设置相关的数据库管理程序及数据库软件进行数据存储,并保证数据准确、完整及可用。
(3)数据整合层
在对已有的数据进行必要的抽取、清理的基础上,进行系统加工、分类汇总、分析整合及交互,利用多维分析方法,从不同的角度进行分析比较,提取隐藏在数据中的信息,为业务应用及辅助决策提供信息支撑,发挥信息集成的作用。
(4)信息应用层
基于整合后的数据资源,提供相应的集成业务应用,如智能航行、智能船体、智能机舱、智能能效管理等。并可面向船舶管理的具体需求定制主题,进行数据挖掘,得到但不限于故障分析、预报预警、辅助决策等能力。
(5)信息展现层
通过人机交互,按照客户定制,提供相应数据挖掘结果,并用适当的形式表达故障原因,利用数据趋势对用户经营决策提供预报预警等。
三、天津港智能拖轮的应用实践
天津港智能拖轮目前处于审图阶段,其智能方案也在随着设计的深入逐步细化。结合拖轮的实际应用,其智能方案包括以下五个方面:
1.智能航行
智能航行是利用计算机技术、控制技术等对感知和获得的信息进行分析和处理,对船舶的航行与作业安全进行风险提示,对船舶航路和航速进行设计和优化,并能在整个航程期间与岸基中心建立通信联系相互转运信息,在保证安全的条件下设计和优化航速和航向使燃油消耗最低,且具有在整个航行期间不断优化的能力。基于上述目的,智能航行包括船舶航行智能监测、预计到达时间、航路设计、经济航速建议、航行风险提示和船舶边界障碍探测等功能。
其中,船舶边界障碍探测系统是结合拖轮助泊作业的特点提出的,通过设置包括船型图和警戒线显示等内容的独立的可视化界面,提供船舶之间的距离以及接近速度等数据。探测系统作用范围将覆盖拖轮360度范围,作用距离不小于50米,并可自由设定报警距离,当有大型物体接近船体并超越设定值时或者接近速度过快时,系统就能够发出警报。
2.智能船体
智能船体是基于船体数据库的建立与维护,为船体全生命周期内的安全和结构维修保养提供辅助决策,同时还可以通过船体相关数据的自动采集与监测,提供船舶操纵的辅助决策。船体监测及辅助决策系统对船舶运动状态、船舶装载以及海况、航向、航速等数据进行采集、存储、分析、显示,当这些数据的变化超过预设临界值时,智能系统发出警告,并提供指导船舶航行操作的辅助决策。智能船体具备船体监测、获取船舶浮态、船舶吃水、船舶姿态、环境温度、海水温度、舱室温度等数据的功能。
船舶是一种受环境因素影响非常大的装备,目前船员对于船舶状况、航行状态等的判断主要还是依靠经验和理论知识,这样一来难免会出现不恰当的决策,造成不必要的人力、物力或财力损失。而智能船舶简单来说,就是以“大数据”为基础,运用先进的信息化技术,如实时数据传输和汇集、大计算容量、数字建模能力、远程控制、传感器等,实现对航行状态以及船体状况进行智能化的感知、判断分析以及决策和控制,从而更好地保证船舶的航行安全和效率,大幅度减少甚至杜绝人为因素造成的事故。
其中,船体监测系统是通过船体测厚数据的变化量与变化速度对船体钢板进行监控与预警,并规划下一次坞修时船体检测与钢板修补和换新计划,以实现船体外板全生命周期的计划性和智能化管理。
3.智能机舱
智能机舱是对机舱内的主机、发电机组、舵桨、辅机、轴系的运行状态进行监测,根据状态监测系统收集的数据,对机械设备的运行状态和健康状况进行分析和评估,并能够根据分析与评估结果,提出纠正建议,为船舶操作和检修提供辅助决策。
其中,对主机、发电原动机和舵桨的监测主要是对机械传动装置和热工状态进行监测,动态显示相关参数。同时系统根据设备的维修要求,依据实际工作的时间自动对预防性维护项目进行提示。对于发电机组的功率、频率、运行时数、启停次数、调速特性、AVR调整特性等进行监控和记录,对发电机的绕组温度和轴承温度进行检测。通过配电板上开关合分闸次数、异常脱扣次数和电流等的监测对泵、风机、热水锅炉等辅机进行智能化管理。通过在相应的油、水舱柜及舱底设置液位测量传感器,并根据液舱舱容及舱底水位高度设置报警。液位测量通过相应的软件自动计算相应液体的液位高度、实际容积与重量,舱容计算具有船舶横倾、吃水差、温度及密度修正功能。而舱底水位高度报警值可通过工作站进行调节。
此外,根据拖轮管理的实际经验,智能拖轮方案在主机和舵桨的滑油系统中设置了水分和金属磨粒的在线监测。当润滑油中出现大颗粒金属磨粒或润滑油中金属磨粒含量、水分含量变化率突变时,系统发出相应的警报。同时,在主机和舵桨的振动敏感位置设置三维振动传感器,目的是通过振动监测精确、可靠地评价机器和螺旋桨的工作状态,通过数据的积累、综合分析来进行故障预判并提出修理方案。
4.智能能效管理
智能能效管理是对船舶主要耗能设备、船舶航行状况等进行数据的采集、传输、存储、分析并能传输至岸基中心,定期进行船舶能效状况综合评估,提供参数报警、能效优化和改进的辅助决策建议;通过集成控制系统的延展功能,通过对主机的能耗进行的实时监测与能耗分析,为最佳航行方案提供油耗数据支持;系统能够自动生成对应于船舶航速、主机转速的油耗及耗油率曲线。
其中,能效管理与船舶作业性质、操作人员建立对应关系,得出综合性的分析为建立能耗标准和节能操作提供依据。
5.智能集成平台
智能集成平台采集智能航行、智能船体、智能机舱、智能能效管理等系统的数据,形成船上数据与应用的统一集成平台。智能集成平台要求具备开放性设计,能够整合现有船上信息管理系统及后续新增系统,以实现对船舶的全面监控与智能化管理,并与岸基实现数据交互。通过智能系统采集的数据,智能集成平台集成船上已有的智能系统的信息资源可以在集成平台数据库中存储,或与其建立有效的调用关系。智能集成平台能够集成船舶信息管理系统的有关功能,实现公司及船舶对船舶相关信息的管理,如设备维护保养管理、船员交接及基本信息管理、安全管理、体系管理、成本管理、海事资料电子管理等。
智能集成平台配备相应的软件及接口,可将指定的数据通过无线网络的手段传输至岸基数据中心。数据传输分为实时传输与定时传输两种。实时传输因要保持实时性,数据量不宜过大。大部分的历史数据及维修数据因数据量大,宜采用实时传输、定时校验的数据传输方式。为预防计算机病毒及恶意入侵,船岸数据接口应设置防火墙。为保证系统的可靠性,智能集成控制系统要求配置双冗余的主控控制器及冗余的网络。系统依据FMEA要求,任何一个控制子功能的故障,不能影响到其他的分系统正常运行。
四、智能拖轮面临的挑战
1.行业规范的建立
《智能船舶规范》为智能船舶的建造指明了发展方向。基于科技的不断发展,规范应与科技和船舶应用同步考虑,是包容和开放式的。拖轮在船型设计、动力配置、作业环境等方面同远洋货船存在巨大差别,而在拖轮行业内其主要设备配置和作业性质又具有高度的一致性,其智能化的发展需要在满足规范的前提下融入其作业特性,以更好地实现安全、经济、环保的目的。由此,一个统一的智能拖轮方案亟待建立,以实现行业内大数据的共享。
2.设备商维修与管理系统的开放
智能集成是将拖轮所有的机电设备运行参数、故障诊断进行集成且数据资料可以实现相互调用。这就需要设备商对其接口协议和数据库进行一定程度的开放。基于商业保密的原因,在构建系统的技术协议谈判中会遇到一定的困难,这在一定程度上会影响智能集成系统的完整性和分析判断的准确性。
3.数据的筛选和信息的挖掘与利用
通过传感器获得船舶相应的信号和设备运行信息,实现船舶航行“感知”能力相对简单,但面对感知过程中涉及的信号种类较多、数据量巨大、信息间存在冗余和冲突,如何去过滤并进行数据综合分析,继而实现智能故障诊断与辅助决策则是一个需要长期探究的问题。
4.人工智能应用和智能系统的自学习
智能拖轮作为一个新生事物,目前没有与拖轮作业相适应的现成的管理软件可以套用,需要重新研发。除了较高的研发成本以外,还需要考虑到系统的稳定性、人机交互、与现有的岸端管理软件的兼容与数据调用。同时,随着管理功能的逐步完善,软件还应具有开放性和可扩展性。而如何将高速发展的人工智能技术应用到智能系统,并使智能系统具有自学习能力,将是未来拖轮智能化需要不断去探索的重要课题。
五、拖轮智能化的前景展望
拖轮的作业范围一般距岸较近,通过4G、5G网络以及北斗导航等通信手段易于实现船岸一体化;而国内拖轮的主要设备配置又具有较高的一致性,其大数据的共享也将提高整个行业的管理水平,发挥行业资源互补的优势。随着信息技术的不断发展、行业共识的逐步建立、拖轮建造厂和系统集成商的建造经验逐步积累、设备商对智能方案的积极响应,智能拖轮必将成为港口的一道靓丽风景。
智能船舶的研发目前尚处于初级阶段,智能船舶最终能够智能到什么程度,还没有明确的答案,但船舶智能化发展趋势是毋庸置疑的,同样毋庸置疑的是我们对智能化探索的道路亦将是漫长的。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
舰船科学技术(2022年20期)2022-11-28
水上消防(2022年1期)2022-06-16
疯狂英语·新读写(2021年6期)2021-08-05
船舶标准化工程师(2019年4期)2019-07-24
珠江水运(2019年9期)2019-06-02
中学生英语(2017年6期)2017-07-31
青年歌声(2017年6期)2017-03-13
舰船科学技术(2015年8期)2015-02-27
海军医学杂志(2015年2期)2015-02-27
