基于大数据产业化的青岛地铁机自中心技术分析
2018-08-15 02:18孟宪磊
现代制造技术与装备 2018年7期
孟宪磊
(青岛地铁集团有限公司运营分公司机电部,青岛 266031)
1 地铁机电系统技术现状
当前,各地地铁机电系统大致分为通风空调系统、低压配电系统、给排水系统、电扶梯系统以及站台门系统[1]。在青岛地铁的机电系统中还包括综合监控系统、BAs、FAs、气体灭火系统和门禁系统。各地地铁在技术分析大多采用数量统计法、实地勘察法,随着近年来轻轨振兴,R型地铁广泛兴起,R型广泛应用于乡村振兴,相比技术采样相对偏远、传统技术手段相对薄弱,在日新月异的技术革新中虚拟现实技术正以低成本、高标准的姿态跻身于机电创新领域。本文采用虚拟现实技术应用于当前地铁机电系统中,弥补了传统分析中事必躬亲地域的不足,同时节省了人力与物资。
2 典型性分析
2.1 主体介绍
青岛地铁车站动力电系统采用380V三相五线制、220V单相三线制方式进行供电,系统范围大致包括站台层、站厅层和设备及管理用房的环控、排水、消防、电梯、自动扶梯、自动售检票及通信、信号、站控室等系统动力设备的供配电和车站环控室所供配电设备的电控控制。气体灭火系统由管网子系统和报警控制子系统两部分组成[2]。
就当前机电测试中,采用虚拟现实技术设计了一种新的机电测试骨架方案,其设计的骨架三维模型如图1所示。此方案记为方案A。A方案最大的优点就在于弹性条的材料可以不断选择。但是,随着动作组的不断进行,A方案中的两板与弹性条的链接松动比较严重,这需要在技术上不断改进。

图1 主体骨架A方案三维简化图
根据机械设计的程序,通过对该方案技术评价之后,设计了更合理的方案B。B方案的设计是随着试验的不断进行设计出来的,在B方案中骨架材料又进行了改进,采用了一种新型的材料作为主体骨架材料。这种材料是一种新型的多孔弹性高分子材料,相对于A方案而言,B方案中的骨架系统在执行动作时,变形效果良好,且需要的动力小,更加理想可行。

图2 B方案三维模型图
2.2 驱动方案
本文设计的机电驱动模式为:由两台直流电机来控制两个主动轮,通过改变输出电压的极性来控制两轮的转向,从而实现前进、后退、加减速及转向几种不同运动状态的变化。电机转速与控制电压的关系表示为:

公式1中,n为直流电机转速,K为比例系数,U为直流电机的电压,C为常数。由式(1)可知,通过调节控制电压即可调节电机的转速。电机通过螺丝与卡板固定在娱乐机器人底部,靠电机驱动板输出的电压信号驱动,电机输出轴通过连接器与车轮相连,二者轴线平行。硬件驱动方案如图3所示。

图3 驱动方案硬件连接图
2.3 控制系统设计分析
控制系统的设计作为机电系统设计中的关键部分,可以使其他系统按照一定的规律和顺序运行[3]。系统的设计方案如图4所示。

图4 系统方案框图
需要指出的是需求分析在每个模块分别进行了分析,不再单独列出。系统测试在上位机软件设计完成后进行了测试,骨架动作测试和避障试验中也进行了控制系统的测试。采用此方案设计的控制系统,具有结构模块化、二次开发扩展能力强的特点。而且,软硬件系统的设计交互进行,在整个设计过程中都可以进行软硬件调试,能够提前发现和解决问题,避免了最终出现严重错误[4]。
2.4 硬件系统搭建
控制系统硬件平台的搭建对于机电系统整体性能、开发成本、运行稳定性都起到决定性作用,无论是电机控制卡、电源模块还是传感器信号转换模块都已经有很多成熟的产品供选择,所以,本文主要采用硬件模块拼装,自主开发各模块的通讯连接程序来完成硬件系统的搭建,图5为硬件系统拓扑图。

图5 硬件系统拓扑图
2.5 供电方案
本文为提高测试系统移动的灵活性,机电模型采用内置可充电蓄电池供电,蓄电池直接提供一组DC12V电压给显示器供电,另外产生一组12V电压输入至三个型号为LM2596s-ADJ的直流调压模块,其输出电压可调并带有稳压模块,三个调压模块分别输出5V,5V,9V的电压给主控制系统、电机、舵机控制卡供电。为避免电机正常工作时对整个系统电源品质的影响,所以,输出了两路5V电源,一路给主控系统供电,一路给电机控制电路供电,电机控制电路带有光电隔离。可充电蓄电池的容量为7200mA·h,额定电压DC12V,最大电流3A。选用的LM2596s-ADJ是超小型调压模块,便于安置在测试系统内部,输入电压为3~40V,可输出1.5~35V连续变化的直流电,最大输出电流为3A。经实际测试使用,可满足本文设计的测试系统连续稳定使用1h以上。供电方案如图6所示。

图6 供电方案框图
舵机的控制采用树莓派与舵机控制板通讯的方式控制,两者是主从关系,树莓派是控制核心,舵机控制板作为从机,只能执行接收到的上位机命令或事先存储的动作组程序,不具有思维能力。
树莓派与Arduino Uno的通讯连接方式最常用的是GPIO串口(TTL)连接和UsB口连接这两种方式。第一种的接线是将舵机控制板的串口(RXD、TXD、GND)和树莓派GPIO模块上的串口(RXD、TXD、GND)对接,因为舵机控制板的串口电压为5V,树莓派的引脚电压为3.3V,所以中间需要有逻辑电平的转换;第二种的接线只需用UsB线把两块板的UsB口对连即可。
本文设计的机电系统选用了两个直流电机作为移动的执行元件。通过分析,虽然可以用树莓派自带的GPIO引脚直接驱动电机的转动,但驱动电机需要相对较大的电流,为避免树莓派因输出电流过大而烧坏,中间需要连接一个驱动器。本文选用了专用的L298N电机控制模块。电机控制的系统流程图如图7所示。
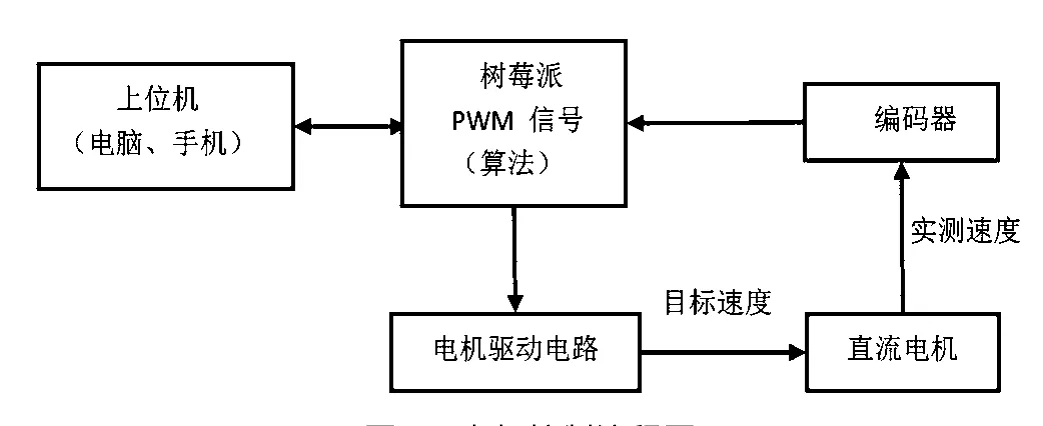
图7 电机控制流程图
电机驱动中,由树莓派给L298N电机驱动模块发送PWM信号实现直流电机启停、加减速和正反转的控制。L298N驱动模块采用sT公司生产的L298N直流电机驱动芯片,可同时独立驱动两台直流电机,引脚如图8所示,IN1、IN2控制电机M1;IN3、IN4控制电机M2。该模块控制信号电压为DC5V,额定电流2A,工作电压范围3~46V。

图8 L298N芯片引脚定义
2.6 主体骨架有限元模型
选取了3个节点进行分析。图9为系统单元示意图。在该系统中,从位置A开始运动,平动到位置B,发生弹性变形到位置C。

图9 有限元模型
任意位置的位移向量:

公式分别计算了柔性机器人在平动和弹性变形中的线位移和角位移,U指的是任意截面的总位移,β是任意截面的总转角,是弹性变形引起的线位移,βf是是弹性变形引起的转角。在用节点位移分别表示角位移β、横向位移W、轴向位移V如下:


h1、h2、h3均为拉格朗日函数,qe=[V1W10 V2W20 V3w30]T,主要是指节点位移向量。
拉格朗日运动方程式一般情况下可表示为:

式中,K指动能;P指的是位能;L看作是拉格朗日算子。
在动能和势能的分析中,将两个公式联立之后代入拉格朗日方程,即可求得所需方程组。
qte是与qe相对应的骨架单元转动时的位移在局部坐标的表述,不难得出:

将式(10)~式(12)代入拉格朗日方程:

得到单元动力学方程:

式中,fin、fex分别代表相邻单元作用力以及单元所受外力。需要指出的是对于动力学方程的建立,亦可以用拉格朗日乘子法建立动力学方程,但方程非常复杂繁琐。采用传统的拉格朗日乘子法对方程的推导时,需要考虑主体骨架的弹性变形以及弹性振动,这种算法比较复杂,在此不再进行阐述。
2.7 分离拉弧试验
该机电系统中主回路电路图如图10所示。

图10 合成回路原理图
图10所示为一个简单的合成回路主回路,Cu和Lu分别为电压源的电容和电感,振荡即会产生工频恢复电压,cu和Lu的电容值和电感值参数需要合理配置,Ci与Li分别为电流源的电容和电感,振荡产生工频试验电流。其中RVDT、RCVDT分别为1:1000的电阻分压器与阻容分压器,R0、C0分别为调频电阻和调频电容,使试品断路器TB两端暂态恢复电压的峰值和频率得到改变。试验时主要是控制好四个时序,即CB、AB、TB和TR。CB、AB、TB的最初工作状态为分、合、合,当开始试验按钮被按下后,经过合闸断路器的固有合闸时间后CB关合,从而引发Ci放电将短路电流引入电流回路,此时TB中将会通过工频试验电流。以电流波形开始为时间基准,则在波形开始后7.5ms处应该实现AB分闸,在波形开始后8.0ms处应该实现TB分闸。与此同时,控制点火触发,暂态恢复电压串入TB,试验完成。实验装置如图11所示。

图11 拉弧装置
触头运动图像采集系统的结构简图如图12所示,触头图像采集系统主要由可拆真空灭弧室及操动机构、高速摄像机、计算机、机械泵和扩散泵组成。其中,可拆卸真空灭弧室与普通灭弧室差别在于其设置两个观察窗口,采用不锈钢材料制成,且比普通灭弧室大1~2倍,以防止大量金属蒸气凝结而影响拍摄效果。通过透明的观察窗口,摄像机可拍摄下触头运动序列图像;图12中所示机械泵和扩散泵的作用是保持真空灭弧室中的真空度不低于6.66×10-2Pa。系统工作原理是,系统启动时,计算机控制操动机构动作,操动机构带动绝缘拉杆运动使触头开合,计算机控制摄像机开始同步拍摄,保证触头运动过程得到完全记录。
3 结语
本文采用虚拟技术构建机电模型,将动力学分析应用于青岛地铁机电系统的研究方法,在分析中利用帧间图像、可控性搭建等方法,解决当前青岛地铁机电技术分析中“难操作、难定性、难试验”的核心问题,为下一步地铁运营的机电科研技改打下坚实基础。

图12 触头图像采集系统
猜你喜欢
电子乐园·上旬刊(2022年5期)2022-04-09
中国新技术新产品(2020年5期)2020-05-06
建材发展导向(2019年10期)2019-08-24
中国交通信息化(2019年6期)2019-08-23
电子制作(2019年11期)2019-07-04
电子制作(2018年10期)2018-08-04
电子制作(2017年17期)2017-12-18
农业工程技术·温室园艺(2017年3期)2017-07-13
中国酿造(2016年12期)2016-03-01
中国煤层气(2014年3期)2014-08-07