直线游标永磁电机反步滑模控制研究
2018-09-28 06:12唐红雨黄海峰
微特电机 2018年9期
唐红雨,徐 峰,黄海峰
(镇江市高等专科学校,镇江 212003)
0 引 言
轨道交通作为解决人们出行的一种新型交通工具受到了广泛的关注,而电机作为轨道交通驱动系统的核心部件得到了广泛的研究[1-2]。旋转电机必须通过变速传动系统才能把动力传递给机车,而直线永磁电机则可以省略传动机构,无需转换装置,就可以把电能转换成直线运动机械能[3-4]。普通直线永磁电机需要将永磁体或绕组沿轨道全线铺设,成本很高;直线初级型永磁电机由于将绕组与永磁体同时放置在初级上,次级仅需将导磁材料开槽形成齿槽结构,因而能够节省材料,降低工程成本。直线游标永磁电机(以下简称LVPM电机)[5]是一种新型的特种电机,在直线初级永磁电机基础上发展而来,利用磁通切换原理工作,区别仅在于定子齿端不是一对永磁体而是若干对永磁体[6]。该电机能够在低速时利用自身的游标效应产生较大的推力,因而在船舶推进、轨道交通等领域得到较为广泛的应用[7-8]。LVPM电机系统是多变量、强耦合、非线性的复杂系统,传统的比例积分微分控制性能不佳,滑模控制无需被控对象的精确数学模型,抗干扰能力强,鲁棒性好等优点,在电机控制领域与智能方法相结合而被广泛采用[9-11]。
本文采用反步控制理论与滑模控制相结合的方法,设计中间虚拟控制量来实现LVPM电机的位移控制器,通过最小参数学习算法逼近未知项[12],获得系统的最佳状态,提高LVPM电机控制动静态性能。
1 LVPM电机模型
本文的研究对象是采用组合永磁体阵列的新型初级LVPM电机,该电机的次级相当于传统转子永磁型电机的定子,初级相当于传统转子永磁型电机的转子,也叫动子,横截面如图1所示。

图1 LVPM电机横截面
参照旋转坐标系,把次级坐标系当作定子坐标系,初级坐标系当作转子坐标系[12]。LVPM电机在d,q轴下的电压方程可以写成[13-14]:
(1)
式中:ψd=Ldid+ψf;ψq=Lqiq。如果忽略电阻,则LVPM电机的推力方程可以写成:
(2)
式(2)的第一部分为永磁磁链与q轴电流产生的,它与电机的角频率和速度有关;第二部分为d轴跟q轴电感不相等引起的推力,如果设计时采用隐极机形式,则此部分不存在,另外,id=0控制策略也可以消除此部分产生的力;第三部分是由d轴跟q轴之间的互感产生的推力,通常情况下,互感都比较小,因而此部分力被忽略掉。角速度ωe=pπυ/τ,并且采用id=0控制策略,则:
(3)
LVPM电机机械运动方程:
(4)
式中:ud,uq为d,q轴电压;id,iq为d,q轴电流;R为每相绕组电阻;p为极对数;τ为极距;ψf为永磁体磁链;Ld为直轴励磁电感;Lq为交轴励磁电感;υ为动子线速度;ωr为动子机械角速度;ωe为动子电气角速度;Fl为直线电机的负载阻力和电机本身的定位力之和;Bv为粘滞摩擦系数;M为动子总质量。
2 反步滑模控制器设计
LVPM电机控制系统框图如图2所示。控制系统电流控制器采用常规的PI控制,采用光栅尺采集位置信息,位置控制器采用反步滑模控制方案,位置控制器的输入为位置跟踪误差和速度跟踪误差,输出控制量为q轴电流。

图2 LVPM电机控制系统框图
LVPM电机在动力传动过程中,存在一些不确定因素影响控制过程。滑模控制鲁棒性强,对系统参数摄动具有不变性,但存在滑模抖振;反步法是一种倒推式设计方法,能够将复杂非线性系统分解成不超过系统阶数的子系统,再为每个子系统设计部分Lyapunov函数和中间虚拟控制量,然后将它们集成起来完成整个控制律的设计[15-16]。把反步法和滑模控制结合,能弥补常规PID控制和滑模控制的不足。根据LVPM电机的数学模型来设计其滑模控制器,设υ*为给定速度,υ为实际速度,s为动子位移,s*为位移期望值,取u=iq,则:
(5)

(6)
在实际LVPM电机运行中,不确定项存在一些变化,状态方程改写成:
(7)
(8)
反步滑模控制器设计分为两步。

γ=ηz1+z2
(9)
式中:η>0。为降低滑模阶数和计算的复杂性,这里选择一阶线性滑模函数。
(10)
设计控制器:
u=b-1{-η(z2-c1z1)-a(z2+s*-c1z1)-
(12)

将式(12)代入式(11)得:

(13)

式(13)中,F为不确定项,是未知非线性函数,采用神经网络对不确定项F进行自适应逼近[17],逼近算法:
(14)
F=WTh(x)+ε
(15)

(16)

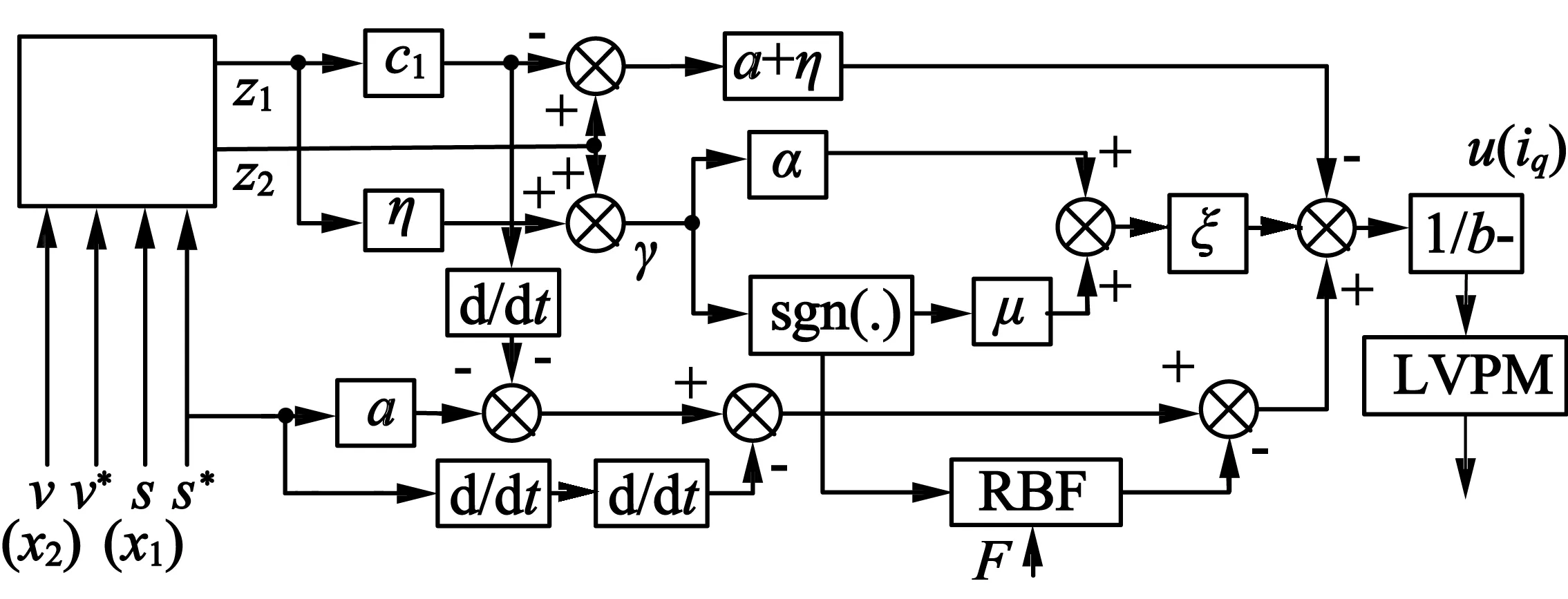
图3 反步滑模控制器框图
3 仿真与实验
为验证LVPM电机反步滑模控制策略的有效性,搭建了仿真模型。LVPM电机参数如下:绕组电阻R=2.5 Ω,极对数p=1,极距τ=0.02 m,永磁体磁链ψf=0.25 Wb,d,q轴电感Ld=Lq=0.024 5 H,粘滞摩擦系数Bv=0.2 N·s·m-1,动子质量Mr=3.5 kg,电流环kp=200,ki=5,速度环kp=300,ki=150,动子载物质量Ml=3.0 kg,负载推力初始为Fl=120 N。
图4为输入阶跃信号,给定速度指令v*=1m/s时的速度和推力仿真图。可以看出,相比传统 PID控制,反步滑模控制方法的响应时间略有加快,且超调量明显下降,从10%降为2%,在阶跃响应瞬间,推力明显突变,但本方法要好于PID控制方法,说明系统在动态和快速性方面都得到较大的提高。

(a) 速度响应
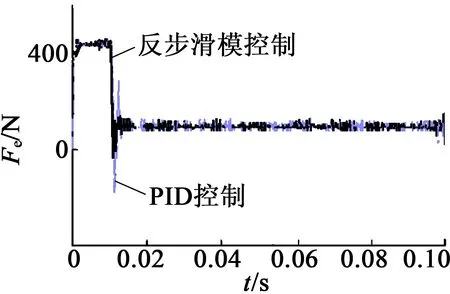
(b) 推力响应
图5为在0.5 s速度从1 m/s降为0.8 m/s的响应图,图6为在0.06s推力从120N升为200N的响应图。从速度对比图中看出,PID控制在系统转速变化时有较大的波动,超调量比本方法大8%,响应速度慢一些。从推力对比图中可以看出,在速度受到干扰突变时,反步滑模控制器控制方法的速度脉动更小,说明此方法对系统扰动具有较好的抑制性能。从推力响应曲线可以看出,与PID方法相比,本方法响应速度更快,因而,本方法比PID控制方法具有更好的控制性能。
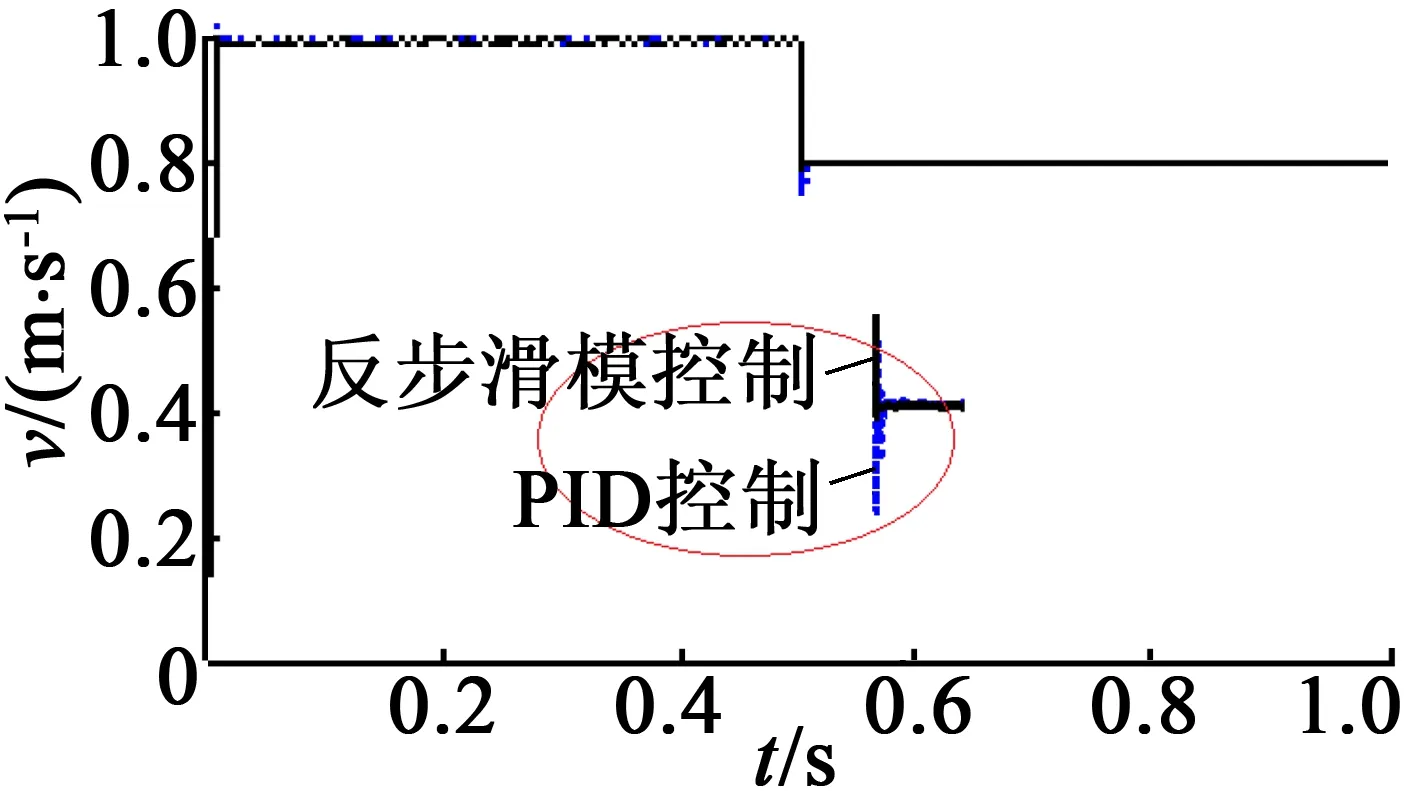
(a) 速度响应
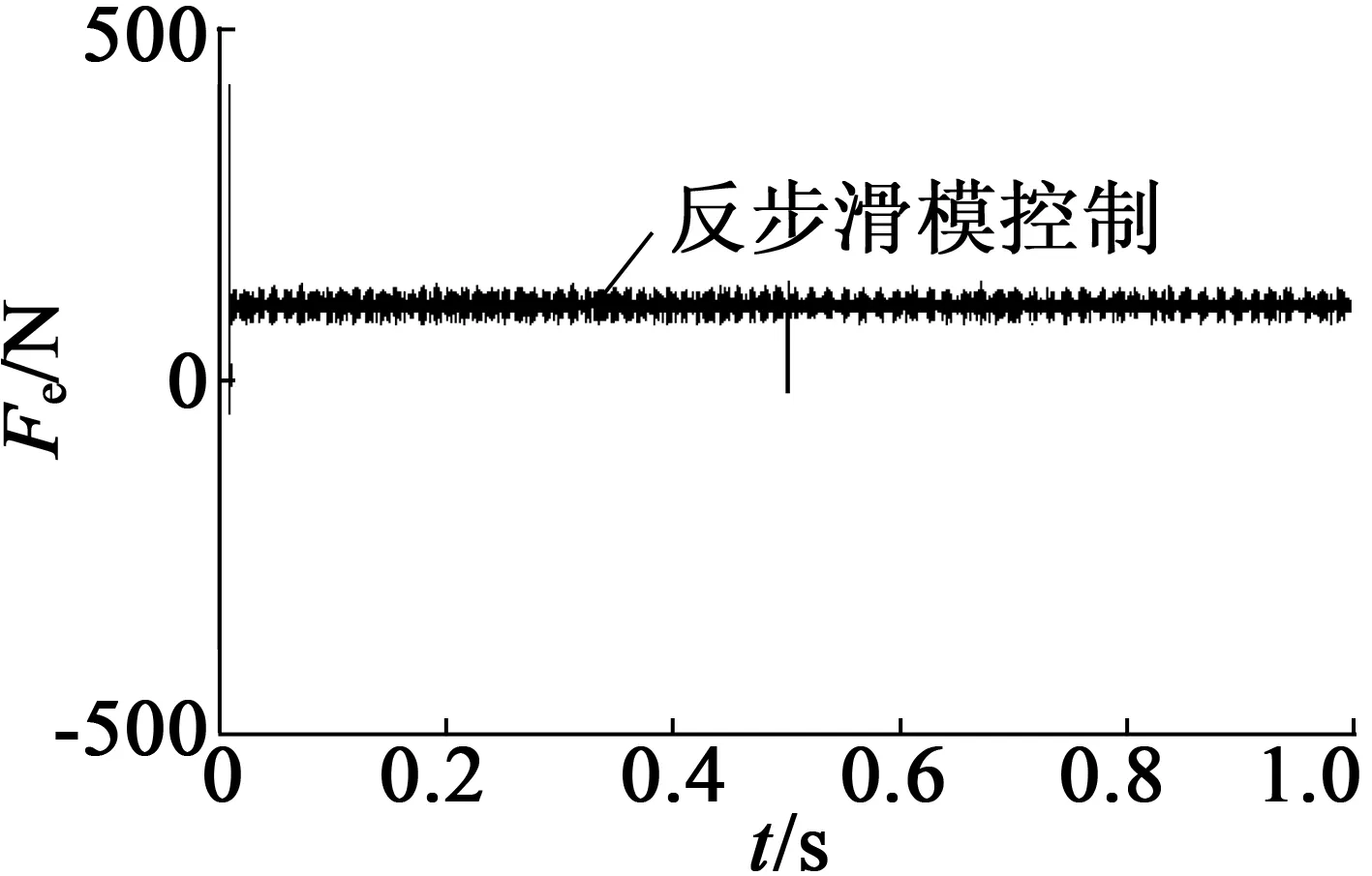
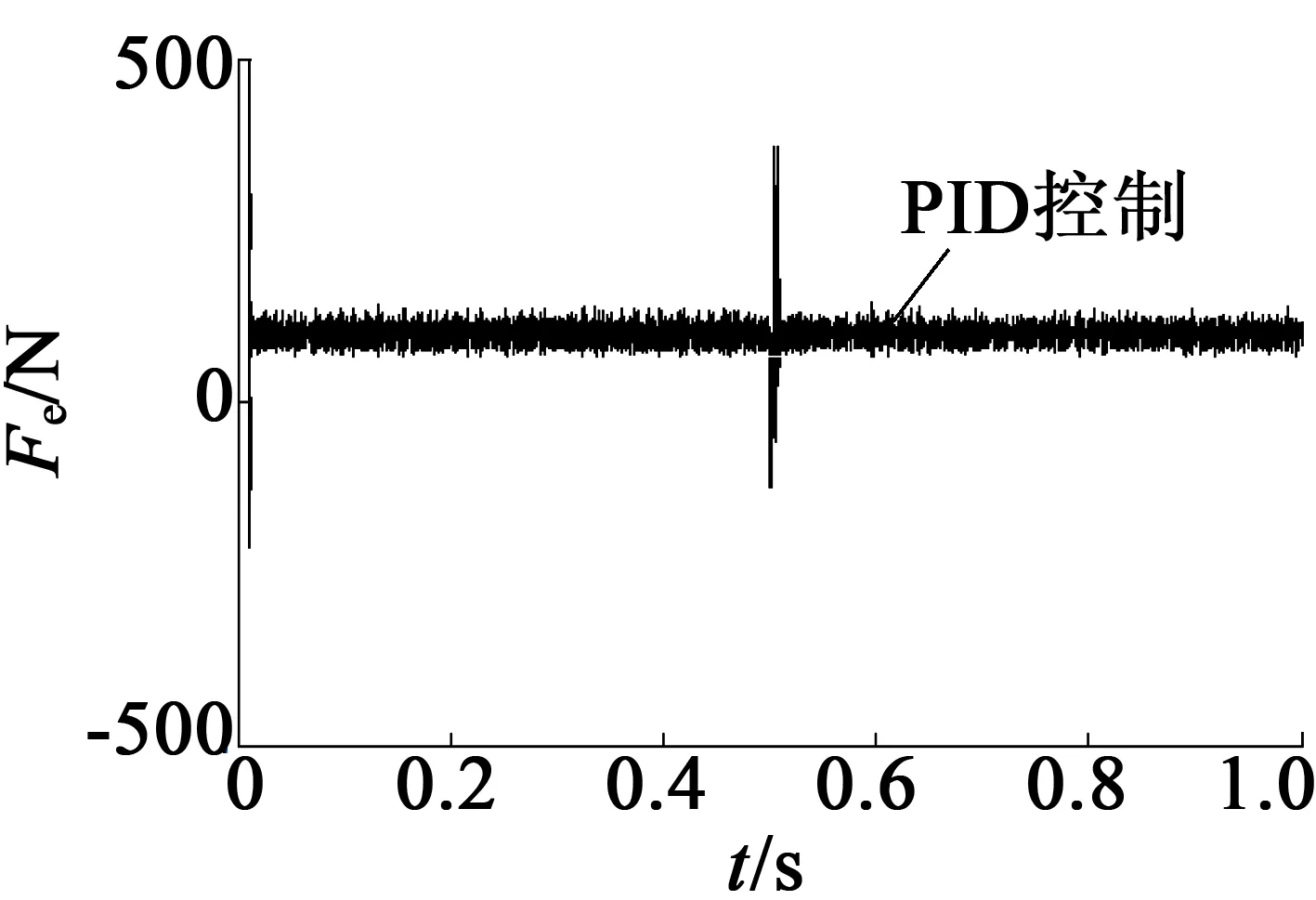
(b) 推力响应

(a) 速度响应
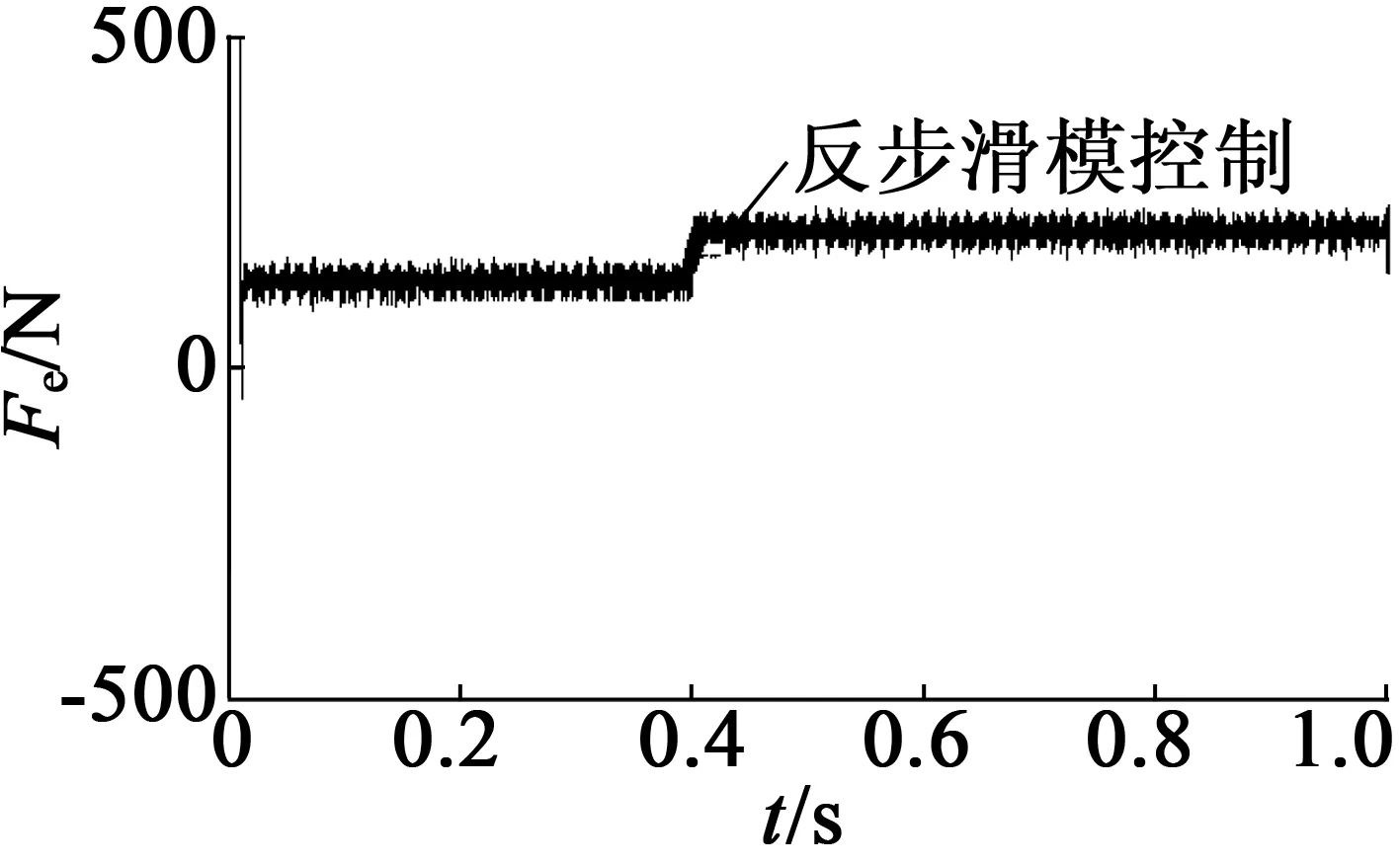
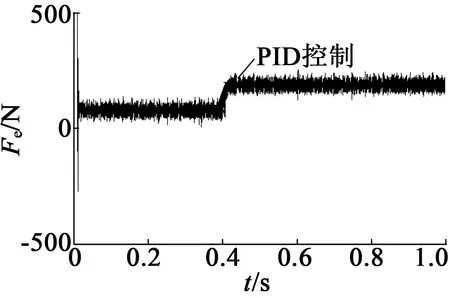
(b) 推力响应
为了进一步验证本方法的可行性,在实验室搭建了LVPM电机实验平台,LVPM电机驱动控制系统实物图如图7所示,主要包括LVPM电机、智能功率驱动模块、DSP 控制模块、电源模块、仿真器、光栅检测传感器等。
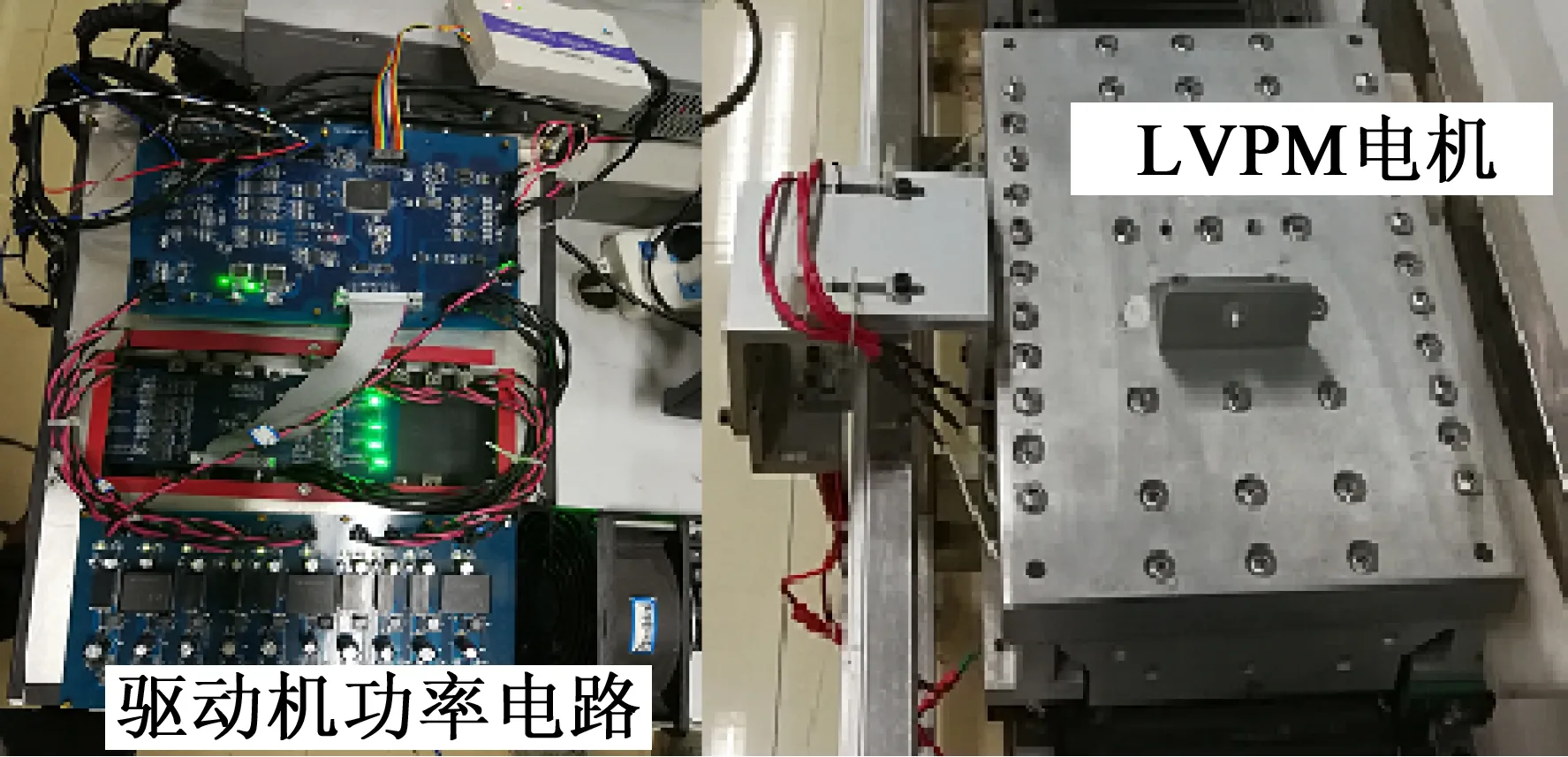
图7 实验平台
给定线速度为0.3 m/s,LVPM电机响应如图8所示,由于推力无法直接测量,以q轴电流代替。

(a) PID控制
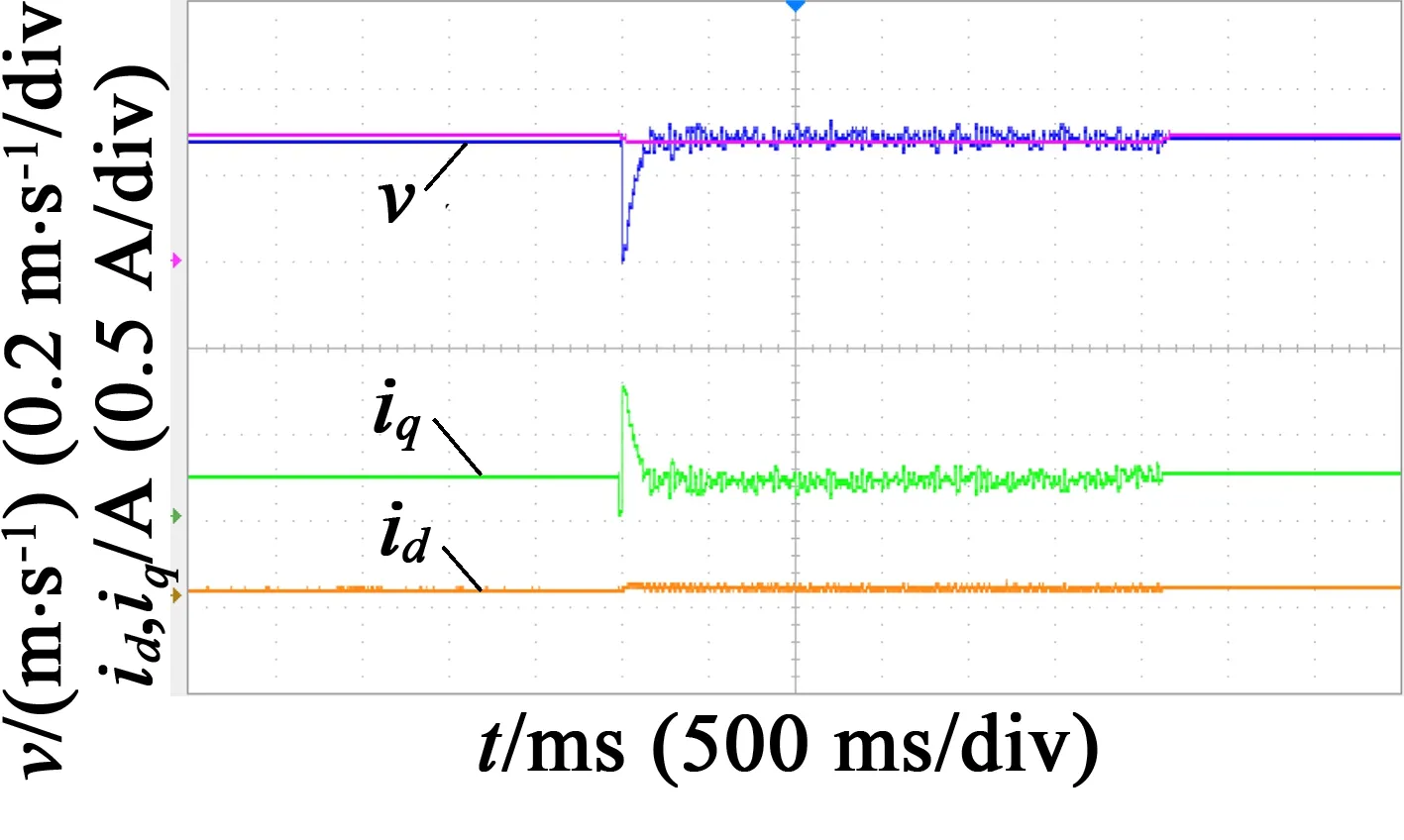
(b) 反步滑模控制
从图8可以看出,反步滑模控制方法在速度响应、电流id,iq响应上比PID控制方法平稳,虽然电流iq在响应瞬间波动大一些,但稳态后的脉动明显小于PID控制方法,且速度响应快速性提高了,超调很小。所以,本方法在提高LVPM电机性能上优于PID控制方法。
4 结 语
本文将反步控制和滑模控制相结合,设计反步滑模控制器,采用最小参数学习算法逼近未知干扰项,该方法应用于LVPM电机速度环控制,使滑模变量在有限时间内收敛到零,提高了LVPM电机系统的静态与动态性能。结果表明,所设计的控制器减少了系统的抖振,保证了LVPM电机系统的位置跟踪能力和鲁棒性,提高了系统动态性能。
猜你喜欢
大电机技术(2022年1期)2022-03-16
计算机仿真(2022年1期)2022-03-01
微特电机(2020年11期)2020-12-30
微特电机(2020年7期)2020-07-28
仪表技术与传感器(2020年5期)2020-06-11
微特电机(2020年3期)2020-03-24
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27