
基于EEMD和频带能量比特性的人与动物雷达微动信号辨识
2018-10-22 00:24殷悦于霄吕昊祁富贵张自启王健琪
中国医疗设备 2018年10期
殷悦,于霄,吕昊,祁富贵,张自启,王健琪
第四军医大学 生物医学工程学院,陕西 西安 710032
引言
生物雷达是一种可穿透非金属介质、非接触探测到生命体的特殊雷达,它具有分辨率高,穿透能力强的特点,可广泛应用于医学监护、灾后救援、反恐维稳等方面[1-4]。1971年Caro等[5]研究的非接触呼吸暂停探测器用于临床上婴儿呼吸暂停的探测,使雷达首次应用于生物医学领域,雷达式非接触生命探测技术也逐渐成为了国内外研究热点。随着硬件性能的不断提高和信号处理技术的不断发展,生物雷达不仅能探测到障碍物后生命体的存在,还能监测到目标的呼吸、心跳等生命体征信号[6-7]。本课题组在国内率先研究生物雷达技术,成功研制出从毫米波段到分米波段的连续波(Continuous Wave,CW)生物雷达和超宽谱(Ultra-wide Band,UWB)生物雷达,在穿透废墟探测生命体方面显示出了很好的优越性[8-11]。
生物雷达主要是利用电磁波的反射原理制成,它通过检测由生命体活动所引起的各种微动,并从这些微动中得到呼吸、体动等有关信息,从而辨识有无生命。由于人与动物的生命体征有相似之处,我们利用现有的探测方案很难直接区分目标是人还是动物。而在有些应用场合,我们不仅关注能否探测到生命体,还要关注该生命体是人还是其它动物目标。如在地震、塌方等灾害救援行动中有效区分人与动物,可以在救援过程中提高搜救效率,优化救援资源,增强救援人员的搜救信心。如在城市反恐行动中关注人与动物的区别,可以提升反恐人员的安全系数,最大限度地保障反恐行动的顺利实施。
国际上已越来越关注生命体辨识技术的研究。目前研究主要集中在两方面。一是目标活动状态的辨识,莫斯科国立鲍曼技术大学的研究小组用3.6~4.0 GHz连续波生物雷达对大鼠静止、睡眠、理毛活动状态进行探测,发现不同状态的频谱图不同,从而辨别大鼠的活动状态[12]。美国宾夕法尼亚大学用多普勒雷达探测人体站立时做出的四种肢体动作,提取信号能量作为特征向量分类,分类效果良好[13]。二是目标类型的辨识,Kim等[14]对人、狗、自行车和汽车行进时的多普勒频谱中的步幅步频信息分类,精度达96%。本课题组曾利用小波熵信息和微动系数分析方法来辨别墙后静止的人和狗目标,发现人和狗的相关系数曲线有明显的不同,从而实现人与狗的辨识[11,15]。国内外研究显示,人和动物运动时的频谱信息有所不同,令人与动物的区分变得可行。但是关于静止目标类型的辨识研究较少,主要是因为人和动物在静态下的呼吸、体动等微动的雷达回波信号有一定相似性,用现有的基于呼吸回波的能量累积法能探测到生命体,但是很难区分人与动物。由此看来,基于生物雷达的人与动物的识别技术仍是国际难题,需要挖掘人与动物在雷达回波信号上的不同点,实现人与动物的识别区分。
生命信号由于受到生理活动和雷达接收端的干扰影响,使得信号信噪比低、随机性强,因此接收到的生命信号属于非线性、非稳态信号,需要一种时频分析方法来精确描述信号频率随时间的变化,反映其时变特性。1998年,Huang等[16]提出了一种新的信号处理方法——经验模态分解(Empirical Mode Decomposition,EMD),EMD可将任意信号分解为固有模态函数(Intrinsic Mode Function,IMF),能准确描述信号频率随时间的变化,具有直观、后验及自适应的特性,适合非平稳、非线性的生物医学信号的处理分析。Wu等[17]提出了聚合经验模态分解(Ensemble Empirical Mode Decomposition,EEMD)方法,对EMD进行了改进,抑制了EMD中出现的模态混叠并保持了其自适应特性。
本文研究了基于UWB生物雷达的人与家兔的辨识。家兔的呼吸和心跳信号较微弱,并且易于控制其活动,与人体在压埋状态下呼吸心跳微弱且移动范围有限的特点相似。提出了一种区分人体与动物目标的UWB生物雷达回波新方法,该方法基于EEMD信号处理技术,将回波信号的各尺度分量从高频到低频不断分解,再依据自相关函数特性重构目标的微动信号,利用重构信号的频带能量比信息来区分人体与动物目标。
1 UWB生物雷达系统
本课题组研发的UWB生物雷达非接触生命探测系统工作原理,见图1。脉冲振荡器产生脉冲信号,一路触发电磁脉冲发生器产生重复频率为128 kHz的窄脉冲,通过发射天线辐射出去,一路经过延时电路产生距离门,对接收天线接收到的雷达回波信号进行等效时间采样,得到不同距离点上的信号。再通过积分电路实现脉冲积累,经过放大和滤波后,高速采集传输给计算机。系统参数,见表1。

图1 UWB生物雷达系统原理图
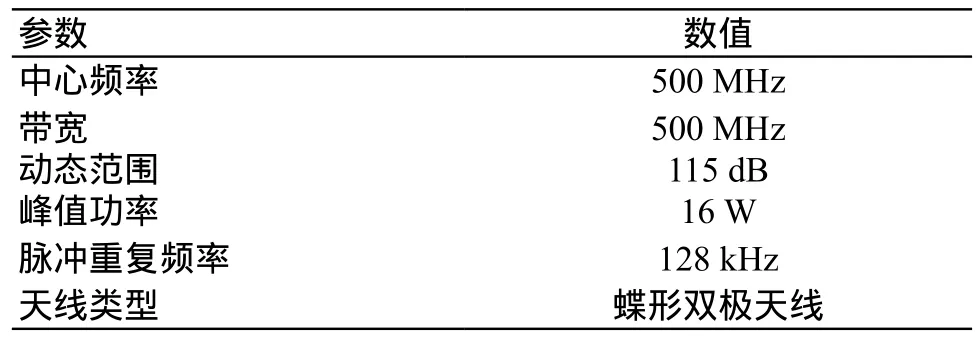
表1 UWB生物雷达系统参数
2 信号处理算法
2.1 经验模态分解
EMD本质上是一组滤波过程,将信号中存在的不同尺度下的波动或变化趋势逐级分解,产生一系列具有不同特征尺度的数据序列,每个序列称为一个IMF分量。EMD可以处理非平稳和瞬态问题,得到信号的局部频谱特征,能根据分解过程中信号的特征自适应发生改变,具有自适应时频分析的特点。
EMD分解基于3点假设:① 信号至少有一个极大值点和一个极小值点;② 特征时间尺度定义为相邻两极值点之间的时间间隔;③ 如果信号没有极值点,只有拐点,可通过微分获得极值点,然后再积分得到相应分量[16]。具体处理如下:
(1)对一原始信号X(t),用三次样条函数插值连接所有极大值点形成上包络线,所有极小值点形成下包络线。X(t)与上下包络线均值m1之差记为h1,则:

将h1作为新的X(t),重复上述步骤直到hi满足IMF的两个条件:① 极值点数与过零点数相等或至多差1个;② 在任意一点,局部极大值和局部极小值的包络线均值为0,即信号关于时间轴局部对称[16]。此hi为第一阶IMF,记为C1。
(2)在X(t)中去掉C1,有:

将r1作为新的给定信号X(t),重复步骤(1),直到第n阶的残余信号rn为单调函数,不再满足IMF的两个条件,不能再筛分出IMF分量。

(3)原始信号X(t)可表示为n个IMF分量和一个残余项的和,即:

式中各IMF分量Cj(t)代表信号从高到低不同频率段的成分。rn(t)为残量,代表信号平均趋势。
2.2 聚合经验模态分解
在EMD分解中,若信号存在奇异点,极值点的分布就会发生改变,从而上下包络线也会改变,进而影响求得的IMF分量,使之不再满足IMF的两个条件。因此分解中可能会出现不同时间尺度特征成分被分解到一个IMF,或者同一时间尺度成分出现在不同IMF中,这种现象称为模态混叠[18]。为了克服模态混叠的问题,Huang等[16]提出了EEMD处理方法。EEMD的原理是当信号叠加上频谱均匀分布的白噪声时,分解时不同尺度的信号区域将自动映射到与白噪声相关的频率尺度上去。根据白噪声的零均值特性,每次添加不同的白噪声,经过足够多的测试求均值后,白噪声会相互抵消,只剩有用信号[17,19]。每次给原始数据加入不同的白噪声序列,重复分解得到多组IMF,对其求均值作为最终的IMF。人的微动数据经过EEMD分解后得到的12阶IMF分量曲线,见图2。
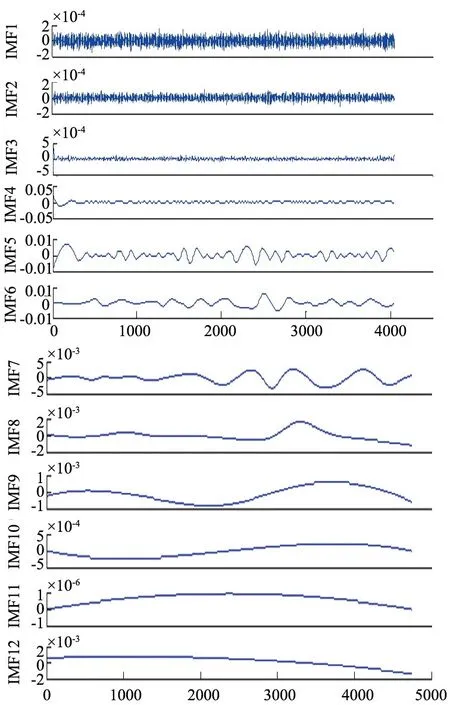
图2 EEMD分解得到的IMF分量曲线
2.3 自相关函数
信号的自相关函数表征信号x(t)在不同时刻t1和t2取值间的关联程度,是从宽带噪声中检测信号是否存在的有效手段。定义为:

式中的“E”为数学期望运算子。原始信号x(t)采样点数为N,自相关后序列长度变为2N-1,且在第N点为峰值,关于第N点对称。一般信号为1 Hz和5 Hz的正弦波叠加(图3),采样点数200点,从自相关曲线可以看出各采样点的取值具有一定关联,表现为较强相关性,其归一化自相关函数值在对称点200处最大,在其余点有缓慢振荡趋势,所以能量在其余点也会分布,计算出在采样点[199,201]区域的能量集中比为6.22%[20]。而随机噪声各时刻的取值表现为弱相关性,其归一化自相关函数值在其余点迅速衰减,能量大部分集中在对称点附近,能量集中比为54.56%。因此,噪声的归一化自相关函数曲线在对称点附近的能量集中比要比一般信号的能量集中比大。根据此性质,从自相关函数曲线图和能量集中比都可以区分噪声和一般信号。
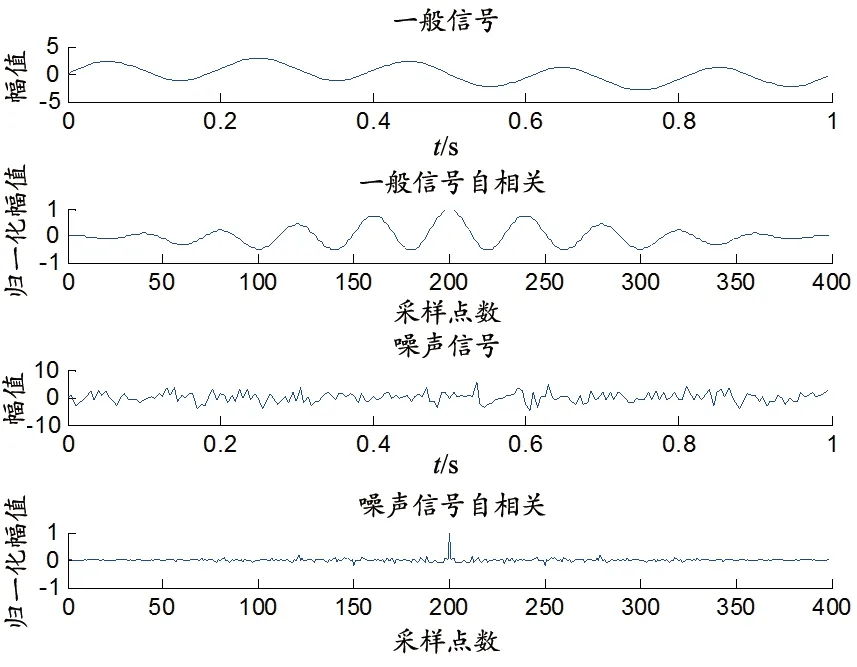
图3 一般信号和噪声信号的自相关函数
3 实验及结果分析
3.1 材料和仪器
雷达探测选择单发单收模式,采样点数为2048点,探测范围为6 m,采集时间约为1 min。实验对象为由第四军医大学实验动物中心提供的五只健康新西兰兔(重约2.2 kg,雌雄不拘)和五名平均年龄为25岁的健康男性。雷达天线紧贴厚度约28 cm砖墙。兔作为被测目标时放平台中心处保持静止状态,平台中心高度正对雷达天线,距离天线3 m。人作为被测目标时站立于同样位置保持平静呼吸。实验场景,见图4。

图4 实验场景图
3.2 信号处理步骤
由于接收到的雷达回波有大量噪声和杂波干扰,因此要先对原始回波进行预处理。预处理步骤如下:首先对回波做时域归一化。然后进行去直流去除静态杂波。再进行低通滤波去除明显的高频噪声。最后用基于最小均方误差(Least Mean Square,LMS)算法自适应滤波。经过预处理,目标区域信号明显增强,直达波、背景噪声和高频干扰被有效抑制。
预处理后利用能量信息找到目标的那一距离点的时域信号,对其做EEMD分解,其中附加的白噪声的标准差为0.1,组数为50组,分解得到N阶IMF分量。噪声往往表现为高频特性,主要集中在前几阶IMF中。随着阶数增加,噪声分量逐渐减小,有用信号成分增加,信号的自相关函数在对称点的能量集中比也逐渐下降。为了区分噪声主导的IMF分量和有用信号主导的IMF分量,对每阶IMF做自相关处理,再由公式(6)获得每阶IMF的自相关序列在采样点区域[n1,n2]的能量集中比η(i),i-1,2…N,公式(7)获得能量集中比下降率β(i),i-1,2…N。以能量集中比下降率β作为区分噪声和有用信号的阈值参数。

式中,R(n)为离散自相关序列,能量集中区域n1,n2取自相关的对称点前后各一点的区域。η(i)表示第i阶IMF的自相关序列在能量集中区域的能量集中比。

若β(i)>2则当前阶的能量集中比η(i)下降到比前j-1阶能量集中比平均值的倍还小,说明第j阶IMF开始往后为有用信号占主导,能量不再全集中于零点。噪声与有用信号的分界点即为第j阶IMF。其中,第一阶IMF的能量集中比下降率β(1)为0。
由于生命体的微动信号多为低频信号,因此前j-1阶IMF分量几乎全为高频噪声,根据公式(8)将第j阶到第N阶IMF分量重构,获得重构信号sre(t)。重构后保留了有用信号,去除了大部分噪声。

人体在静止时,生理体征微动可简单近似为呼吸微动、心跳微动和其他人体微动的叠加[21],其中呼吸引起的胸腔运动相对较明显,信号能量较强,心跳引起的胸腔微动幅度太小,被呼吸所淹没。因此雷达探测到的目标微动信号主要由呼吸运动产生。兔子的呼吸频带主要分布在0.4~0.8 Hz,人的呼吸频带主要分布在0.2~0.4 Hz,以人的呼吸频带作为参考频带,那么兔的呼吸信号在参考频带上占的能量很小,能量占比比人的能量占比要低,因此根据能量占比信息在一定程度上可以辨识人和兔。由公式(9)求得重构信号在参考频带0.2~0.4 Hz上的能量占比pr。

其中Ere为p重构信号的频域总能量,Ere_r为重构信号在参考频带上的能量。
3.3 结果分析
一组兔子的目标点信号进行EEMD分解后的IMF自相关函数图,见图5。各阶IMF自相关函数的能量集中比和能量下降率曲线图,见图6,可以看出第4阶开始,能量集中比明显下降,下降率大于2(蓝色虚线为能量集中比下降率的阈值2)。因此噪声和有用信号分界点为第4阶IMF。从自相关函数图也可观察出前三阶IMF为噪声分量,说明用能量下降率判断分界点的方法是准确的。根据公式(8)将第4阶以后的分量重构,公式(9)求得能量占比pr=16.59%。

图5 IMF自相关函数
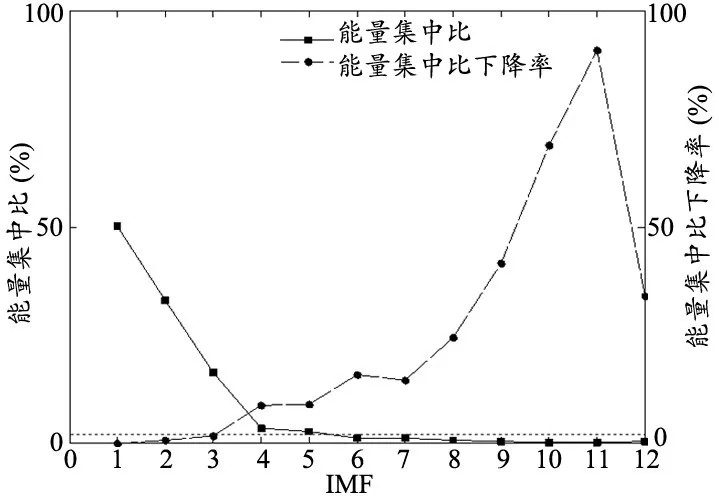
图6 各阶IMF的能量集中比和能量比下降率曲线图
各取人和兔的十组原始数据进行数据处理,结果记录,见表2。使用SPSS 17.0软件进行两样本t检验,结果表明人和兔的能量占比有显著不同(P<0.001),差异有统计学意义。分析得出,当雷达探测出障碍物后有生命体存在时,利用目标的能量占比信息可判断是否为人体目标,如果能量占比明显低于38%,那么目标很有可能是兔子。

表2 人和兔在参考频带上的能量占比(%)
4 总结与讨论
本文首先分析了生物医学信号的特点,根据其特点提出了用EEMD分析超宽带雷达探测的生命微动信号的方法。EEMD解决了EMD模式混叠的问题,能有效提取生命体微动信号。EEMD处理后,将分解得到的各阶IMF分量做自相关处理,利用噪声和有用信号的自相关函数不同这一特性重构目标微动信号,去除大量噪声。以重构信号在参考频带上的能量占比作为特征参数区分人和兔,区分效果显著。
综上所述,本文利用频带能量比信息进行了墙后静止状态下人与兔的探测与辨识,为进一步研究不同动物目标与人类的辨识提供了新思路和新方法。下一步计划从与人类生理参数相近的狗和猪生命体征信号中寻找更多的特征参数,进行多特征参数辨识,提高人与不同动物辨识准确度。
猜你喜欢
科技与创新(2022年21期)2022-11-04
电脑知识与技术·经验技巧(2020年5期)2020-06-22
中国医学物理学杂志(2020年3期)2020-04-06
航天电子对抗(2019年4期)2019-06-02
雷达学报(2018年5期)2018-12-05
雷达学报(2018年5期)2018-12-05
宇航计测技术(2018年3期)2018-09-08
大自然探索(2017年7期)2017-07-25
小樱桃·童年阅读(2016年10期)2017-04-21
科学生活(2015年4期)2015-04-27
