
主动磁悬浮系统中数字功放的研究
2018-12-29 05:18张燕红张建生吴政涛陆超然赵晨晖
微特电机 2018年12期
张燕红,张建生,王 磊,吴政涛,陆超然,赵晨晖
(1.常州工学院,常州 213032;2.中兵通信科技股份有限公司,新乡 453000;3.常州大学,常州213164)
0 引言
主动磁悬浮系统是利用电磁铁的磁力将物体进行无机械接触的悬浮,一般由控制器、功率放大器、电磁铁线圈、悬浮物和位置传感器5部分组成,其中,功率放大器设计的好坏直接影响到整个系统的性能。主动磁悬浮系统一般采用两电平开关功率放大器,为了提高磁悬浮系统的电流响应速度和电磁力响应速度,一般采用提高电源电压的方法,但是提高电源电压就会增加电磁铁线圈中的纹波电流、增加功率损耗。有学者提出采用三电平开关功率放大器,虽然电磁铁线圈中的纹波电流几乎不发生改变,开关损耗也会降低,但是需要进行移相电路设计,使得功放电路更加复杂、成本更高。因此,本文设计一种基于ARM芯片STM32F103ZET的无需移相的三电平开关功率放大器来解决上面的问题。
基于ARM芯片STM32F103ZET的无需移相的三电平开关功率放大器是通过数字芯片来实现控制算法的实时控制与PWM信号的产生,首先通过A/D转换将主动磁悬浮系统电磁铁线圈电流的反馈信号进行数字化,再与位置控制器输出的给定信号进行比较,然后在数字芯片内部对偏差值进行运算处理,从而使得数字芯片产生占空比不断变化的PWM信号来控制开关管的导通与关断,进而给电磁铁线圈提供电流。它不仅实现起来可靠性较高、电路较为简单,效率也得到了提高,而且能够实现多种控制算法对电磁铁线圈电流进行控制。
1 三电平开关功率放大器
三电平开关功放就是以两电平开关功放为基础增加了一种零电平状态,即输出电路中的线圈电流呈现一种自然续流状态。这种三电平开关功放可以降低开关管的开关频率,而且线圈两端的电压跳变只有原来的一半,这样就能够降低开关损耗,同时能够延长功放的使用寿命。由于三电平功放的输出电流纹波与电源电压几乎无关,所以能够通过提高电源电压的方法来提高功放的电流响应速度和电磁力响应速度,进而提高功放的动态性能。
三电平开关功放的调制方式一般采用PWM调制,并且它的输出电路采用半桥式电路,线圈两端电压在+U,0,-U之间转换。开关管T1,T4既可以同时导通和关断,也可以处于一开一关状态,这样保证了3个电平的稳定输出。相对于两电平电路,三电平功放的输出电路中多了一个续流状态,在这个状态中2个续流二极管给线圈提供了续流回路。三电平开关功放的电流原理图如图1所示,半桥输出电路电流状态如图2所示。

图1 三电平开关功放电流原理图
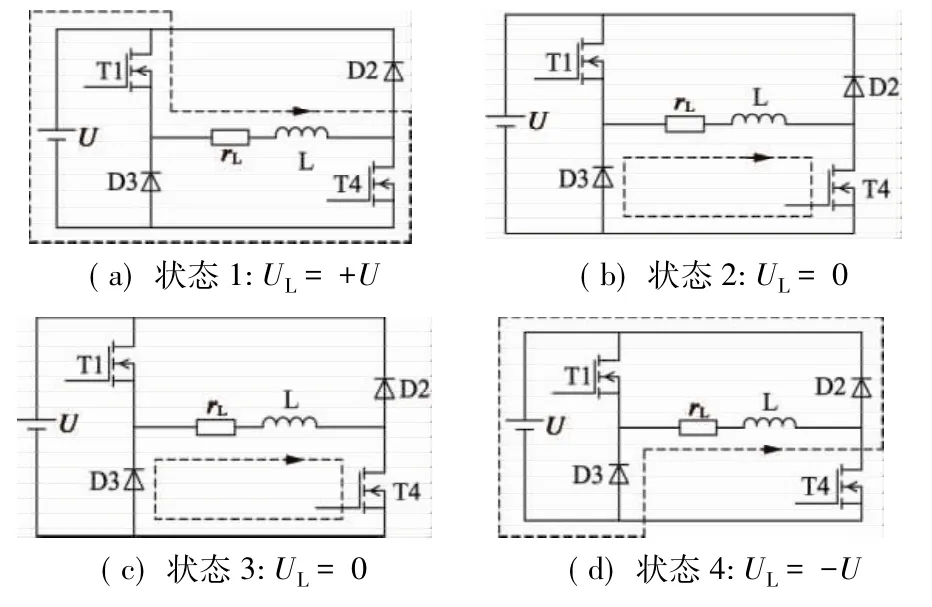
图2 半桥输出电路电流状态
从图2中可以看出,三电平开关功放中的电磁铁线圈电流可以分为3种状态。第一种状态:开关管T1和T4同时导通,线圈两端电压为+U,线圈中的电流增加,此时控制开关管的PWM信号P1和P2的占空比都大于50%,线圈电流变化如图1中的[t1,t2],半桥输出电路中电流状态如图2(a)所示。第二种状态:开关管T1导通,T4关断(或T1关断,T4导通),线圈两端电压为0,线圈中的电流通过二极管续流,此时控制开关管的PWM信号P1和P2的占空比都等于50%,线圈电流变化如图1中的[t3,t4],半桥输出电路中电流状态如图 2(b)、图 2(c)所示。第三种状态:开关管T1和T4同时关断,线圈两端电压为-U,线圈中的电流减小,此时控制开关管的 PWM信号 P1和 P2的占空比都小于50%,线圈电流变化如图1中的[t5,t6],半桥输出电路中电流状态如图2(d)所示。
2 输出电流纹波与系统失真度
纹波电流会对磁悬浮系统产生不利的影响,引起电磁铁线圈的铜损,还会引起铁心的涡流损耗,从而使得功放的效率降低。因此,功放的输出纹波电流大小也是评价其性能的重要指标之一。开关功放的开关管工作在开关状态,其输出电流中的纹波电流较大。因此,在开关功放的设计中必须要考虑到纹波电流对磁悬浮系统性能的影响。
假设纹波电流为ir,主动磁悬浮系统中的电磁力与纹波电流的关系可以表示:

式中:i为系统中的控制电流;i0是转子在平衡位置时的电流,也称为电磁线圈中的偏置电流;x为转子的偏移量;x0为转子在平衡位置时的位移量。
在平衡点(x=x0,i=i0)处作线性化处理,可得:

可得转子在纹波电流作用下的位移变化量:
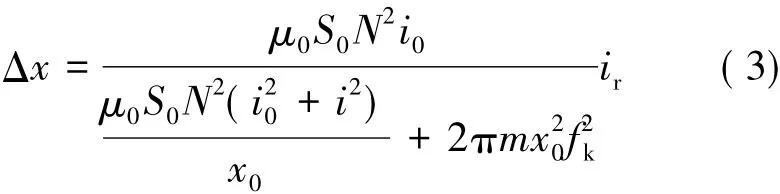
式中:m为转子质量;fk为开关频率。由式(3)可知,转子的机械振动幅度与电流纹波幅值成正比,当磁悬浮系统的各项参数都保持不变时,电流纹波越大,转子的机械振动就越大,而转子的剧烈振动有可能导致转子在高速旋转时脱离系统的控制从而失去稳定。因此,在设计开关功放时要想办法减小纹波电流来减小转子的机械振动。
在两电平功放的一个开关周期内,电路的电压方程:
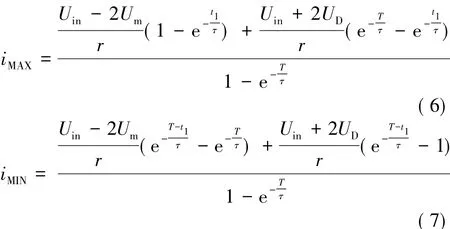
又因为 iL(0)=iL(T)=iMIN,iL(t1)=iMAX,代入式(4)和式(5),可得iMAX和iMIN:
当k无限趋近于0时,我们知道:

由于τ远大于T,因此可对上式进行化简,得到线圈平均电流值ia:

由式(9)可得充电时间t1:

此时的纹波电流ir:

将t1的表达式代入式(11),可得:

忽略开关管压降Um、二极管压降UD和线圈内阻产生的压降iar,最终可以得到两电平开关功放的纹波电流表达式:

由式(13)得知,两电平开关功放的纹波电流ir值反比于线圈的电感值L和功放的开关频率值fk,正比于电源电压Uin,当转子悬浮时位移变化很小,可以默认为线圈电感不变。在功放的开关频率保持不变的情况下,可以通过降低电源电压来减小线圈中纹波电流的大小。但是,降低功放电源电压同时也会降低磁悬浮系统的电流响应速度和电磁力响应速度。因此,在实际的功放设计过程中,应该综合考虑各方面因素来选取功放的电源电压。
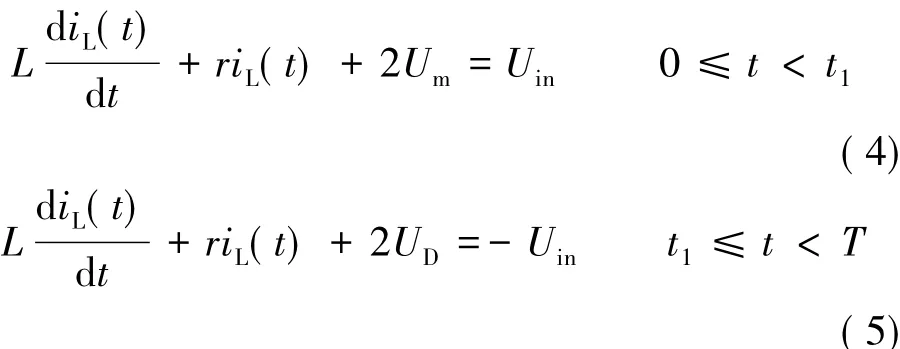
在三电平开关功放的半个开关周期内,电路的电压方程:

与两电平开关功放的分析类似,由于τ远大于T,因此可对式(16)和式(17)化简,得到线圈平均电流值ia:

由式(18)可得充电时间t1:

此时的纹波电流ir:

将t1的表达式代入式(20),可得:

在这里,忽略开关管压降Um,二极管压降UD和线圈内阻产生的压降iar,最终可以得到三电平开关功放的纹波电流表达式:

由式(22)可知,在三电平开关功放的开关频率、线圈电感和平均电流值等具体参数保持不变的情况下,功放输出的纹波电流大小与其电源电压呈正相关性,但是与两电平开关功放相比,其相关性非常小,可以忽略不计。因此,可以通过提高三电平开关功放的电源电压来减小其纹波电流,进而提高磁悬浮系统的动态性能。
3 磁悬浮数字功放设计
在数字功放的控制电路中,最核心的就是控制芯片,控制芯片选择的好坏直接关系到整个磁悬浮系统的综合性能。本文之所以选用ARM芯片,是因为其速度快、功耗低、控制能力较强,芯片内部集成度较高,外围接口更加丰富,标准化和通用性也很好;并且其软件开发是功能裁剪式的,这样可以大大减小软件的开发周期。为了提升磁悬浮数字功放的速度和精度等综合性能,最终选用意法半导体公司生产的ARM芯片STM32F103ZET6。
控制器在数字功放中处于中间位置,它一共可以分为5个模块:电源模块、最小系统电路模块、ADC模块、PWM输出模块和串口通信模块。数字功放控制器的总体框图如图3所示。
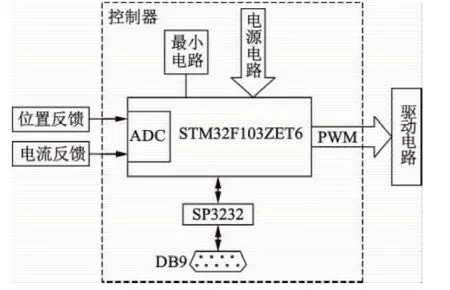
图3 控制器总体框图
控制器的各个模块的功能如下:
(1)电源模块:将输入电压转换为STM32F103ZET6所需要的3.3 V;
(2)最小系统电路模块:保证STM32F103ZET6的正常工作,为其提供时钟电路、启动电路和复位电路;
(3)ADC模块:将位置反馈和电流反馈的模拟信号转换为控制芯片所需要的数字信号;
(4)PWM输出模块:通过STM32F103ZET6产生20路PWM信号,输出到功放中的驱动电路;
(5)串口通信模块:将TTL电平转换为232电平,并且实现与PC机的实时通信。
磁悬浮数字功放的总体设计如图4所示。
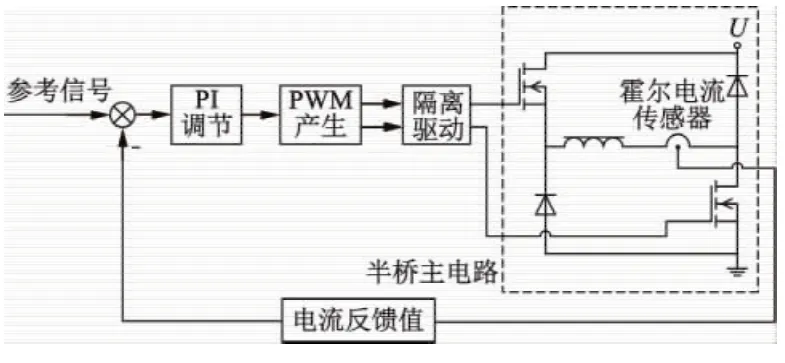
图4 磁悬浮数字功放设计框图
在整个数字功放的电路中,控制电路用来实现PI调节和PWM信号的产生,输出电路采用半桥式电路,驱动电路用来实现半桥主电路的隔离驱动,保护电路用来对整个功放电路进行实时保护,电源模块是为整个功放提供稳定可靠的电源供应。
电磁铁线圈两端的电压与线圈电流之间的关系:

式中:R为线圈等效电阻;L为线圈电感。可得PWM输入到电磁铁线圈的传递函数:
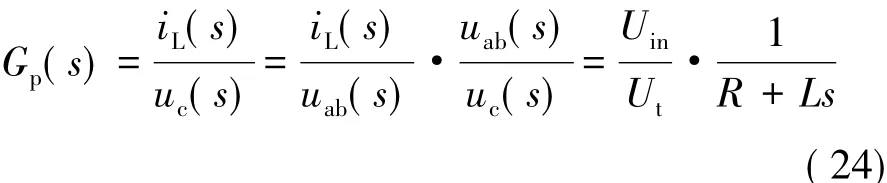
在本文中,电源电压Uin=24 V,三角载波幅值电压 Ut=8 V,线圈电阻 R=2.5 Ω,线圈电感 L=1mH,式(24)可以写为:

4 系统软件设计
本文输出的PWM信号经过隔离驱动后控制输出电路开关管的工作状态,PWM信号可以通过控制芯片STM32F103ZET6的定时器直接给出。本文中,要对五自由度磁悬浮轴承系统进行控制,每个自由度分为上下2个电磁铁线圈,而每个电磁铁线圈需要2个开关管来控制线圈电流,这样一共就需要20路PWM信号。采用STM32F103ZET6的通用定时器TIM2、TIM3、TIM4和 TIM5和高级定时器 TIM1分别产生4路PWM信号,这样就能产生功放所需要的20路PWM信号。下面对通用定时器TIM3的通道1进行详细说明。
首先将TIM3_CCMR1的OC1M位设置为111,此时定时器工作在PWM2模式下,TIM3_CCER的CC1P位设置为0,此时为高电平有效;当TIM3_CNT>TIM3_CCR1时,输出电平有效,而此时的设置为高电平有效,所以IO口输出为高电平。在功放的工作过程中,就是通过不断改变CCR1的值来输出占空比不断变化的PWM信号。具体的软件设置步骤如下:
a)开启TIM3时钟和复用功能时钟,配置PB4为复用输出。
首先要使能TIM3的时钟,因为TIM3_CH1通道重映射在PB4,PB4属于复用功能输出,所以还要开启GPIO和AFIO的时钟。
b)设置TIM3_CH1重映射到PB4上。
因为TIM3_CH1默认是接在PA6上的,所以需要设置TIM3_REMAP为部分重映射,让TIM3_CH1重映射到PB4上面。在库函数里实现的方法如下:
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE)
c)初始化TIM3,设置TIM3的ARR和PSC。
开启了TIM3的时钟之后,就要ARR和PSC 2个寄存器的值来控制输出PWM的频率。频率的计算公式:

本文的功放开关频率为40 kHz,所以输出PWM的频率也为40 kHz。取 ARR=1799,PSC=0,计算可得(ARR+1)(PSC+1)=1800。
d)设置TIM3_CH1的PWM模式,使能TIM3的CH1输出。
由于TIM3_CH1有多种输出模式,因此要将它设置成PWM输出模式。
e)使能TIM3。
使能 TIM3的方法:TIM_Cmd(TIM3,ENABLE)。
f)修改TIM3_CCR1来控制占空比。
在本设计中,控制占空比的CCR1值由控制芯片计算得出,电流反馈值与输入信号的差值经过PI调节得到最终的控制量。在库函数中修改占空比的方法:TIM_SetCompare1(TIM3,unit16_t Compare1)。
5 主动磁悬浮系统数字功放测试
单自由度磁悬浮系统实验平台主要由开关功放、调压器、控制板、PC机、仿真器、电磁铁线圈和跷跷板组成,如图5所示。其中跷跷板上部翘板材料为40Cr,其导磁性非常高。这个实验平台是用跷跷板来模拟单自由度磁悬浮轴承的工作过程,其电源电压为直流24 V,工作电流为2 A。

图5 单自由度磁悬浮轴承实验平台
磁悬浮轴承系统的数字功放工作在三电平时,保持开关频率为40 kHz不变,通过不断改变功放的电源电压来观察电磁铁线圈中的纹波电流,具体仿真结果如图6所示。
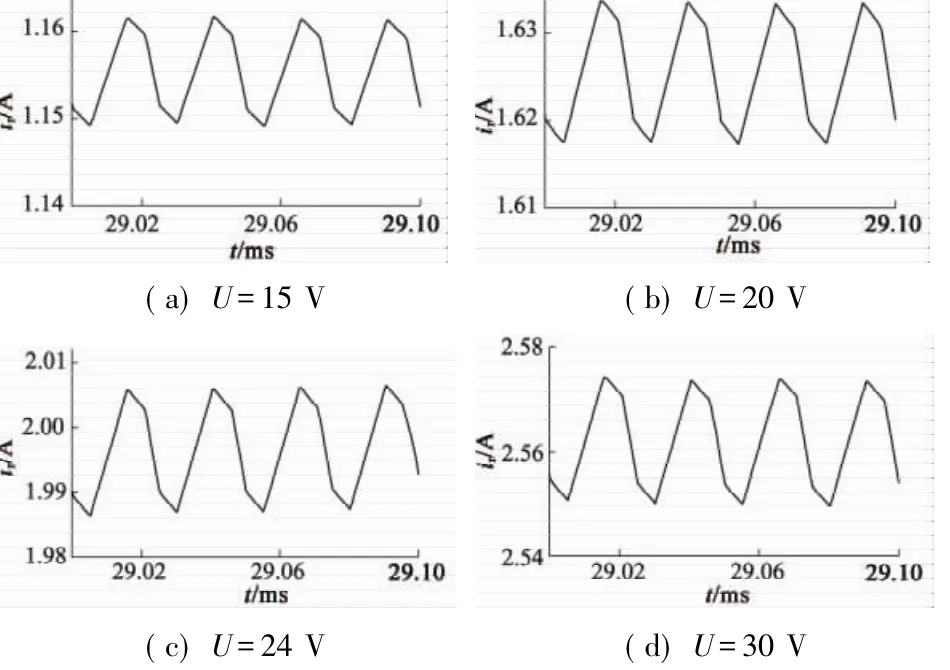
图6 不同电压时的纹波电流
图 6 中的纹波电流依次为 0.012 A、0.016 A、0.019 A和0.024 A。从仿真结果可以看出,在三电平开关功放的开关频率保持不变的情况下,电磁铁线圈中的纹波电流随着电源电压的提高而不断增大。
给定信号设定成一个占空比为50%,频率为100 Hz的方波信号,在主动磁悬浮系统其他参数不变的情况下,通过改变电源电压来观察功放电磁铁线圈的电流跟踪情况,结果如图7所示。
从图7中可以看出,在不同的电源电压下电磁铁线圈中电流都能够跟踪给定信号。随着电源电压的提高,电流跟踪情况越来越好,当电源电压为24 V时,电磁铁线圈中电流跟踪情况较好,说明本文所设计的磁悬浮轴承系统数字功放的性能良好。
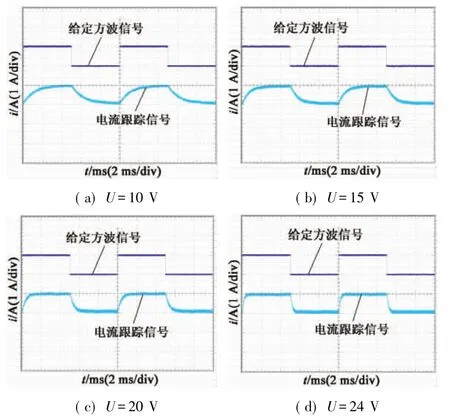
图7 不同电压时的电流跟踪情况
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02
小猕猴智力画刊(2022年4期)2022-05-23
科学技术创新(2021年22期)2021-08-16
小学科学(学生版)(2021年4期)2021-07-23
防爆电机(2021年2期)2021-06-09
通信电源技术(2021年16期)2021-02-18
车辆与动力技术(2019年3期)2019-10-23
时代农机(2019年5期)2019-08-17
科技视界(2018年24期)2018-01-03
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
