
基于遗传算法的双馈电机速度控制系统研究
2018-12-29 05:18樊明龙
微特电机 2018年12期
樊明龙,徐 秋
(扬州工业职业技术学院,江苏225127)
0 引言
近年来,双馈感应电机(以下简称DFIM)在风力发电机组、电动汽车和船舶驱动等需要进行变速控制的领域得到了广泛的应用。常用的DFIM控制技术是磁场定向矢量控制技术(FOC)和直接转矩控制(以下简称DTC)技术。比较这2种控制技术,DTC是在静止的坐标系中直接对转矩进行控制,无需进行复杂的坐标系旋转变换,因而DTC具有结构简单,易于实现的优点,是目前DFIM控制的主流应用技术[1]。然而DTC也存在明显的问题,当电机在低速段运行时,输出转矩会出现较大的脉动[2-3],影响低速段的控制性能。
近年来,一些新型的DTC方案被提出,这些方案的目标是改善低速段的转矩脉动,从而提高转矩和转速的控制精度,获取更宽的调速范围。文献[4]应用滑模变结构理论和反演控制方法设计了DFIM的非线性控制器,以实现对转速的有效跟踪。文献[5]应用模糊理论设计了PI控制器参数,以改善电机的动态特性。文献[6]介绍了基于自扰抗控制的无速度传感器控制方法,提高系统的抗干扰能力。本文提出并研究了应用于DFIM的新型组合GA-PI-DTC控制方法,用遗传算法(以下简称GA)调制PI控制器的参数,以适应系统在不同工作状态下的调节要求,减少转矩脉动,实现DTC系统的最佳控制。
1 传统DFIM速度控制系统的工作原理

图1 采用DTC的DFIM速度控制系统组成示意图
传统DFIM速度控制系统如图1所示,是一个转速、转矩双闭环控制系统,速度调节器使用PI控制器。DTC中预存了一组定子电压空间矢量,根据定子磁链ψ和电磁转矩T的大小选中一个合适的电压矢量输出,电压矢量作用于变频器,变频器输出相应的三相电压,实现对电机定子电压的调节,控制目标是实现对ψ和T的实时跟踪,并确保ψ的运动轨迹为圆形,使系统具有较好的动态性能。DTC的工作原理是测量DFIM定子电流(或电压),使用d,q坐标系中的电机模型公式[7]进行估算,得到定子磁链ψ和电磁转矩T的大小,同时确定磁链所在的扇区,并将估算值与磁链给定值ψ*和转矩给定值T*相比较,根据转矩误差、磁链误差和磁链扇区选择定子电压矢量。
这种系统简单,易于实现,但是一个周期内只作用一个基本电压空间矢量,同时磁链误差的方向是不可控的,所以不能在每个周期中都准确补偿转矩和磁链的误差,从而产生磁链和转矩脉动,这种影响在电机低速运行时尤其明显[8]。
2 改进后的DFIM转速控制系统
2.1 GA-PI-DTC 控制系统组成
为了改善传统DTC系统的性能,引入GA参与控制,图2为 GA-PI-DTC控制系统组成示意图。GA的作用是根据系统所处运行状态在线优化PI调节器的参数Kp,Ki,提高运行参数变化时系统的鲁棒性,使PI调节器输出的转矩给定值T*处于最优,从而补偿DTC控制器的缺陷,减少转矩的脉动和磁链的纹波,获取良好的调速性能。另外,在改进后的系统中不再使用速度传感器来测量电机的转速,而是根据测得的定子电压和电流大小估算电机的转速[9],实现DFIM无速度传感器控制。
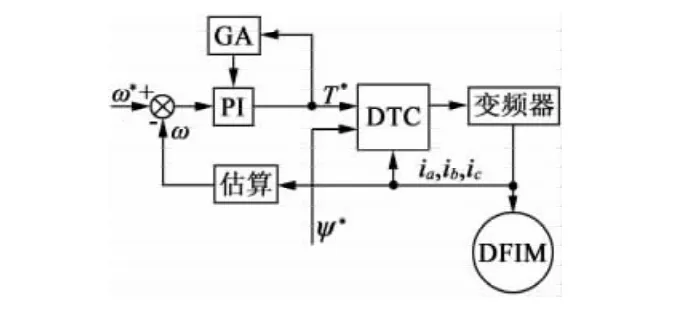
图2 GA-PI-DTC控制系统组成示意图
2.2 基于GA的PID控制
GA是一种通过模拟自然进化过程搜索最优解的方法,GA纳入了达尔文关于自然选择理论的观点和孟德尔遗传学方面的工作,使用计算机模拟生物系统的自然演化[10]。
从工程角度来看,GA是一种优化技术,可以对多个搜索空间进行评估,并可以发现多个解决问题的方法。GA的实现是通过对生物遗传和进化过程中繁殖、交配和突变机理的模仿,搜索出问题最优解。交配和繁殖驱动进化,突变促使对整个搜索空间进行探索,避免结果过早收敛。
图3是使用GA优化PI参数的流程图。这个算法能重复很多代的进化,并允许在迭代过程中创建新的个体,它有可能比他们的父母更好,在达到问题的最优个体解时停止迭代[11]。
在使用GA调制DTC的PI调节器参数时,初始参数设置如表1所示。为获取PI调节器的最佳参数组合,在离线状态下针对系统可能的不同运行状态对GA反复进行了模拟评估,得到的几组最优PI参数组合如表2所示,系统在线运行时可以使用这些参数。

图3 遗传算法流程图
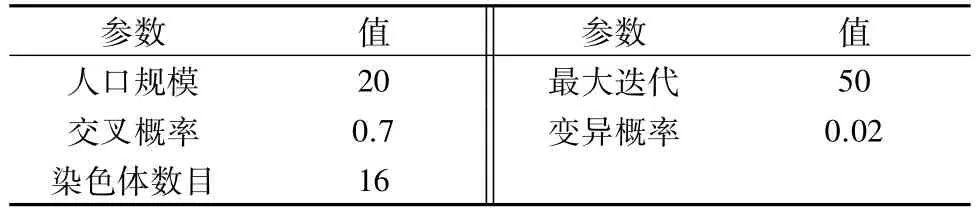
表1 GA的参数设置
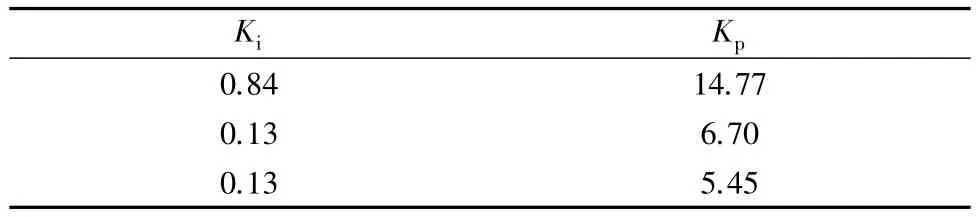
表2 遗传优化PI参数组合
3 仿真实验
为了验证改进后系统的控制效果,使用一台0.8 kW的DFIM测试了2种控制策略(传统DTC和DTC-GA)的仿真结果。所使用的电机工作参数:额定电压UN=380 V,额定频率f=50 Hz,额定转速n=1420 r/min,额定功率 PN=0.8 kW,定子电阻 Rs=11.98 Ω; 转子电阻 Rr=0.904 Ω,定子自感 Ls=0.414 H,转子自感 Lr=0.055 6 H,互感 M=0.126 H,极数 4,转动惯量 J=0.01kg·m2,摩擦系数0.001。
图4是在连接标称负载情况下转速ω从0上升到给定值的变化图。从图4中可以看出,与传统DTC相比,DTC-GA控制系统的响应时间缩短1.6倍,超调量减小10倍。所以,用GA改进后的控制系统能更快地到达基准值,转速上升动态过程中基本上不存在因超调而引起的冲击,体现出DTC-GA系统对转矩和磁链控制的动态性能优异。
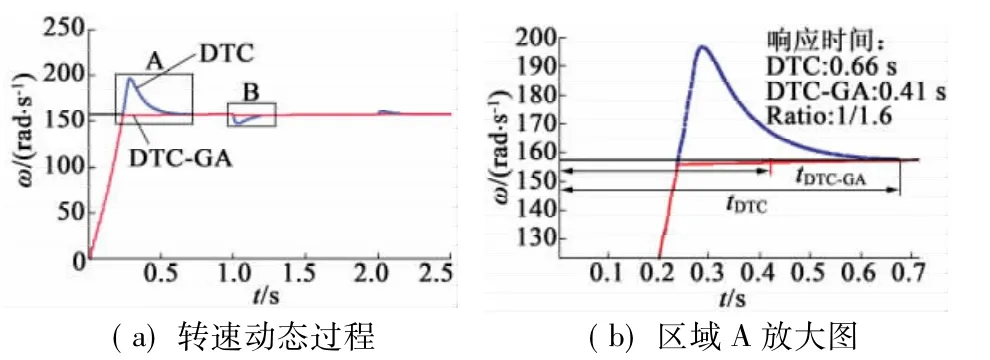
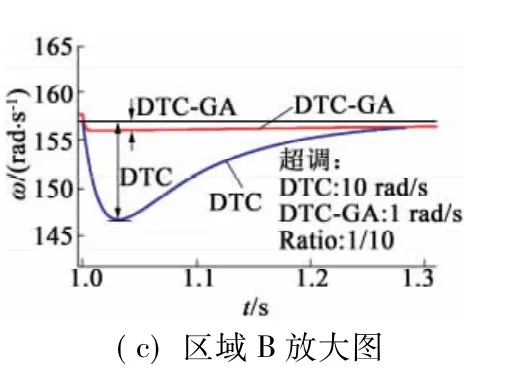
图4 转速变化
图5 是当负载扰动时电磁转矩T动态变化跟踪图。比较传统DTC和DTC-GA系统的响应曲线,结论是在响应时间和超调2个方面的性能都得到了显著改善。
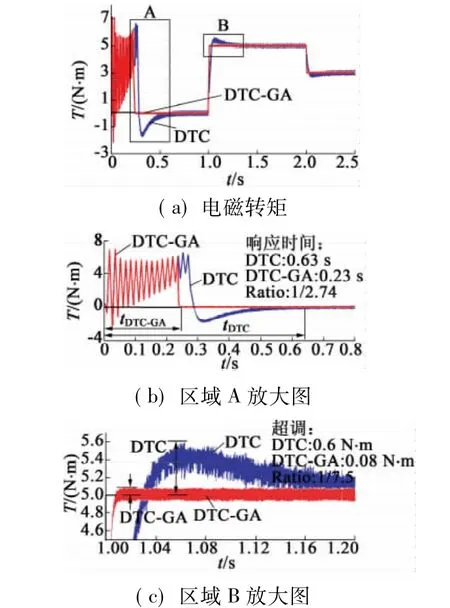
图5 转矩变化图
图6 和图7分别为传统DTC和改进后的DTCGA的定子磁通ψ波形及其圆形轨迹。由图6可知,两者测得的信号之间比率大于50%(传统DTC为 0.048 Wb,而 DTC-GA 为 0.029 Wb),改进后的方案明显降低了定子磁链波动。

图6 定子磁链波形
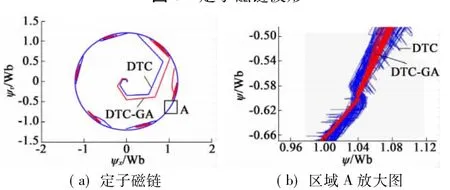
图7 定子磁链圆形轨迹
表3总结了DTC-GA与传统DTC在转速、电磁转矩、磁链等参数方面的比较结果。总体来看,这项工作的主要贡献是:减少纹波和过冲;提高响应时间;提高跟踪电磁转矩的能力,改善调速性能。
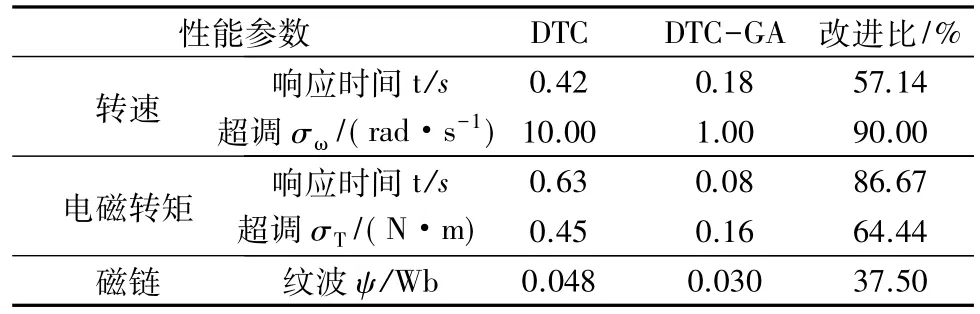
表3 DTC-GA主要性能指标改进
4 结语
仿真结果表明,GA-PI-DTC新控制组合有更快的收敛速度,能有效地降低纹波,在动态响应以及稳定性能方面有许多改进。新的方案更有效率,允许在应用过程中对参数不断调试和改进,在DFIM控制领域有较好的应用前景。
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
宇航计测技术(2018年3期)2018-09-08
汽车与新动力(2015年1期)2015-02-27
汽车与新动力(2014年6期)2014-02-27
