
基于麦克风阵列和SRC-PHAT的发动机异响定位研究
2019-01-03 02:15曾荣曾锐利梅检民贾翔宇
车用发动机 2018年6期
曾荣,曾锐利,梅检民,贾翔宇
(1.陆军军事交通学院研究生队,天津 300161;2.陆军军事交通学院投送装备保障系,天津 300161;3.陆军军事交通学院汽车士官学校装备系装备基础教研室,天津 300161)
在发动机故障诊断中,故障定位一直是研究的热点和难点。在发动机噪声抑制中,识别主要噪声源是抑制发动机噪声的前提[1]。发动机异响噪声定位具有重要的研究意义和应用价值。对于发动机故障定位研究,许多研究者提出行之有效的方法:文献[2]提出了一种基于转速信号的发动机失火故障诊断及识别方法,通过对转速信号的归一化及主成分分析提取样本特征,建立支持向量机故障诊断模型,诊断能达到较高的识别准确率。文献[3]提出一种基于振动信号的发动机故障诊断方法,通过压缩小波变换时频分析监测特征频带能量分布,实现故障的精确定位。文献[4]提出一种多体仿真模型(An advanced multi-body simulation model)综合信号滤波及人工神经网络等信号处理方法,对发动机振动信号进行分析,较好地实现了故障定位。
然而,上述发动机故障定位研究都是基于转速信号和振动信号,这些信号的获取需要通过一系列较为繁琐的设备安装过程。相比而言,声信号的获取较为简单易行。发动机噪声主要有机械噪声和燃烧噪声、空气动力噪声等,其中大部分噪声是由发动机缸体周期性做功循环产生的[5]。因此,噪声中包含了大量的工作状态信息,通过有效地分析可以获得发动机的故障状态和故障位置等信息。
麦克风阵列是一系列麦克风按照特定拓扑结构排列,用来采集声压信号的装置。相比于单个麦克风,经过一系列阵列算法的应用,麦克风阵列具有声源定位、噪声抑制和目标跟踪等优点。由于基于麦克风阵列的噪声源识别具有可视化、智能化、信息化等特点,能够对噪声源实时、准确地进行描述,在工程理论研究和实际生活中得到了大量的使用[6]。
本研究采用A计权系数滤波器对麦克风采集到的声压信号进行滤波,保留了“兴趣”频带的声压信号并提高了噪声信号的能量比。将SRP-PHAT(Steered Response Power Phase Transform)算法的基本原理应用到发动机异响噪声源的定位中,采用SRC-PHAT算法(即改进后的SRP-PHAT算法)对发动机气门异响故障进行试验定位分析。
1 麦克风阵列定位原理
发动机实际工作中产生异响故障时,有经验的高级修理工程师可以凭借自身的听力辨别发动机异响位置。这是由人耳自身的双耳效应及自我“滤波”实现的。但是,高级工程师培养周期长且故障诊断的主观性较强,诊断效果受到人为因素的制约。A计权滤波器能模拟人耳的特性对噪声信号进行滤波[7-8],滤波效果如图1所示,图2示出采用A计权滤波前后异响特征频率信号变化。可以发现,经过A计权滤波后的信号衰减了人耳不敏感频率。通过异响信号与正常信号对比,可以检测设置的发动机气门异响特征频率范围为3 300~4 000 Hz,A计权滤波后特征频率占信号总能量比值由12.62%提高到了29.79%,说明A计权滤波能使噪声信号更加符合人对异响进行判断的主观感受。
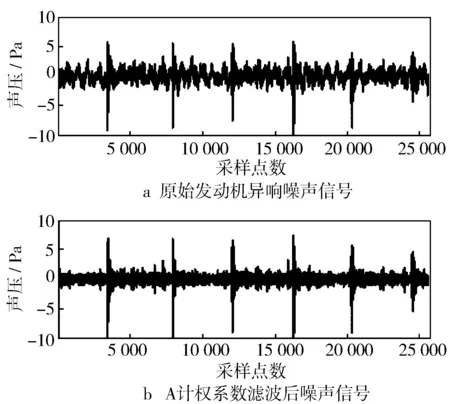
图1 A计权滤波器滤波效果
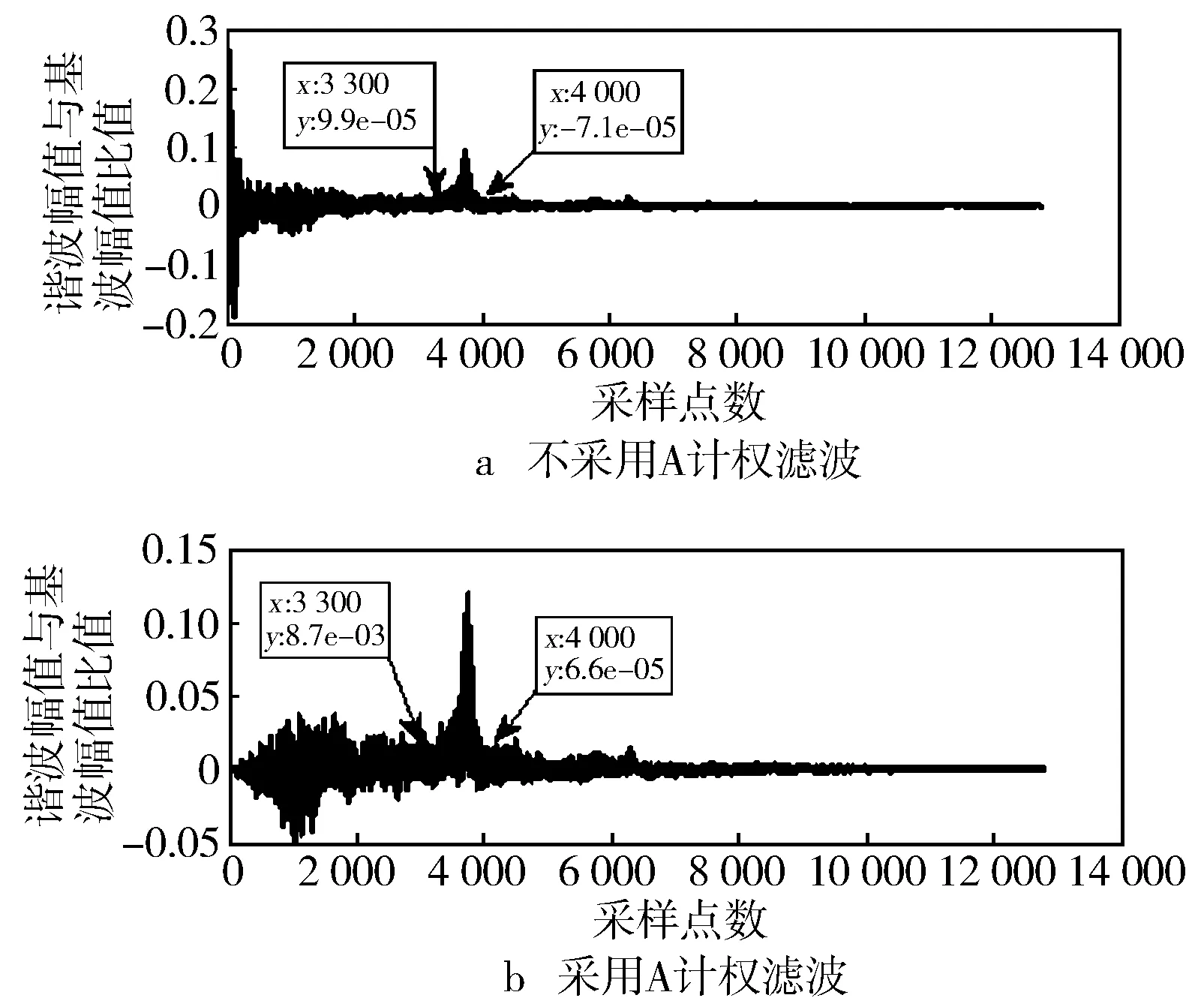
图2 A计权处理异响信号特征频率变化
1.1 基于麦克风阵列的噪声源识别方法
麦克风阵列的声源定位方法从定位原理上主要分为三类:基于可控波束形成定位算法、基于高分辨率谱估计算法以及基于到达时延差算法。目前,应用最为广泛的声源定位算法是基于可控波束形成定位算法[9-10]。
可控波束形成算法起步较早,发展也较为成熟,主要运用波束形成技术在整个自定义的搜索区域不断调整信号接收方向,所接收的总能量值较大的方向即为声源的估计方向。在可控波束形成算法中,最典型的是相位变换加权的可控响应功率算法(即SRP-PHAT),其优点有:对麦克风的阵型没有具体要求,能用于窄带和宽带信号,具有较好的抗噪性能[11-12]。
高分辨率谱估计算法是通过利用各个阵元麦克风之间的相关矩阵,计算相关矩阵的空间谱来获取声源的位置信息,一般只能给出声源的方位角度信息。有关主要算法可分为两类:特征子空间算法和子空间拟合算法,主要不足在于只适用于窄带、远场、平稳信号,而实际应用往往需要处理宽带、非平稳信号,因此实用性不强。
到达时延差算法是通过不同位置的麦克风接收声源信号的时间差,计算声源位置相对两个麦克风位置的曲面,多组麦克风得到曲面的交集即为声源位置。该方法不足在于实际应用误差较大,对于多声源精度和效果不佳[13]。
1.2 异响噪声源SRP-PHAT定位方法
SRP-PHAT算法主要原理是在整个定义的搜索空间设定搜索点,计算在所有的搜索点处,所有麦克风组(麦克风阵列中两两麦克风为一组)相位变换加权广义互相关GCC-PHAT(Generalized Cross-Correlations Phase-Transform weighed)的函数总和。通过空间的全局搜索,把函数值最大的位置作为声源的位置估计。
(1)
(2)
(3)
因此,式(2)可简化为
(4)

(5)
采用相位转换加权函数,SRP-PHAT算法的PHAT权函数值为两个麦克风接收信号幅度谱倒数,即权函数具体形式为
(6)
(7)
(8)
1.3 异响噪声源SRC-PHAT定位算法
SRC-PHAT算法是在SRP-PHAT算法基础上的改进。相比于传统的SRP-PHAT算法,SRC-PHAT算法具有以下特点:随机布点搜索,搜索区域逐步缩减,通过迭代和空间收缩到指定精度结束搜索过程。该算法最为直观的优点在于减少定位运算量的同时,保证了定位的精度。
SRC的基本思想是给定一个初始的搜索空间区域,在空间区域随机选取一定个数的点,计算这些点处的SRP值,从这些点中选取使得SRP值较大的一部分点,保存这些点的位置区域,再从这些点所在区域中进行同样的步骤,直到误差缩小到目标区域,即可得到声源估计位置,过程如图3所示(j为搜索过程)。
图3 运用SRC方法在二维平面内搜索最大值
2 发动机缸体异响噪声定位试验
2.1 试验环境及坐标系的建立
以潍柴WD615发动机为异响噪声试验平台,设置发动机工况为怠速空转,发动机转速为710 r/min。实验室噪声环境为开放式声学条件,室内温度为25 ℃,室内几何尺寸为9 m×12 m×5 m。在本文列表以及正文中,坐标单位均为m。麦克风阵列为非规则平面阵列,麦克风相对位置如图4所示。试验采用霍尔式转速传感器采集发动机转速信号,转速信号上升沿通过发动机编号为一气缸(实验中标识为A)到达上止点时触发,转速传感器具体安装位置如图5所示。
麦克风置于距离发动机气缸平面0.72 m处,气缸与气缸间距为0.16 m,第一缸和第六缸为异响噪声点,分别记为A,B。以麦克风阵列x轴、y轴、原点分别定义笛卡尔空间坐标系的x轴、y轴和坐标原点,麦克风阵列法线方向,向发动机一侧为z轴建立空间笛卡尔直角坐标系,具体如图6和图7所示。在定义的坐标系下,A和B的坐标分别为[-0.40,0.05,0.72]、[0.40,0.05,0.72]。
图4 麦克风平面阵列分布
图5 转速传感器安装位置
图6 麦克风阵列和发动机相对位置

图7 坐标系的建立
2.2 异响噪声定位试验
试验过程尽量减少环境干扰噪声,用NI数据采集系统采集异响噪声声压信号,用编号为0~23的麦克风共采集到24个通道噪声信号,同时用霍尔传感器同步采集发动机转速信号。定位运算是在Inter Core i7-4710MQ四核处理器,芯片组为Inter HM86,运行内存为4 GB的平台上进行。对A点发动机异响噪声信号的采集,设置采样率为25.6 kHz,采集时长为5 s,共采集5组数据,分别标号为1,2,3,4,5。同样对B点进行异响噪声试验并采集试验数据。
由发动机整体尺寸可定义搜索区域为{x,y,z│x∈(-2,2),y∈(-2,2),z∈(0,2)},对每组5 s噪声信号长度进行A计权系数滤波后,对频率范围为3 300~4 000 Hz的发动机噪声信号再用SRC-PHAT算法进行定位运算,记录区域搜索开始时刻到搜索结束得到位置估计的时间。结果如表1所示,A点试验结果平均值为[-0.405,0.051,0.726],平均耗时4.165 s。B点试验结果平均值为[0.403,0.076,0.722],平均耗时3.721 s。
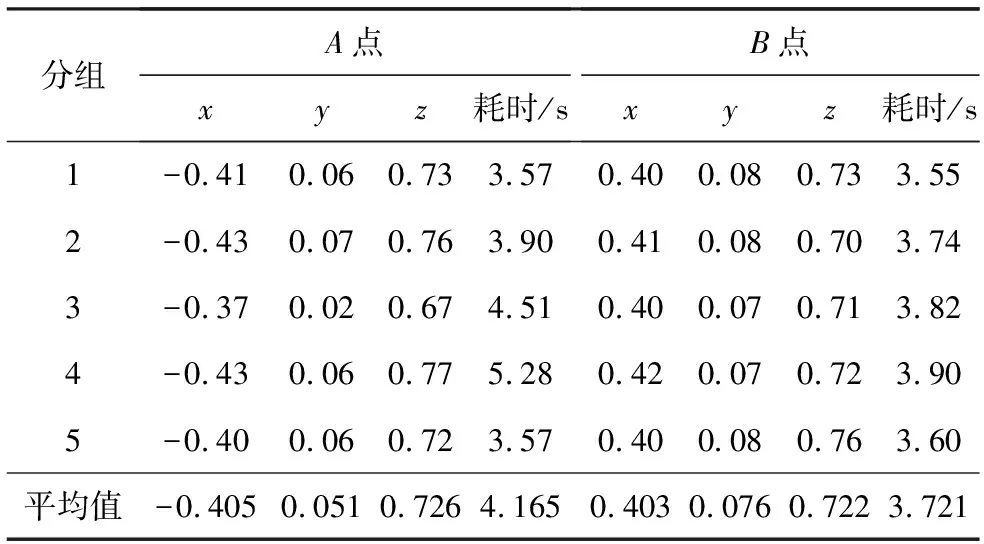
表1 采样时间为5 s时异响噪声定位
为验证SRC-PHAT算法对异响噪声定位的时效性,用试验采集到的转速信号截取一个发动机做功循环信号(信号波形如图8所示),经过A计权滤波后同样做定位试验,试验结果如表2所示。A点试验结果平均值[-0.404,0.059,0.718],平均耗时0.385 s。B点试验结果平均值[0.410,0.081,0.748],平均耗时0.516 s。
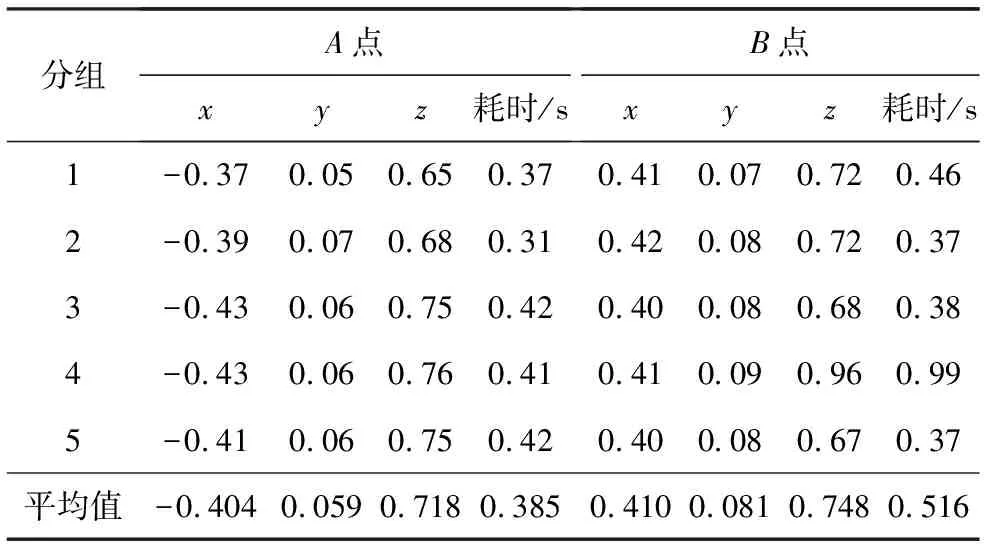
表2 发动机1个工作循环异响噪声定位结果
2.3 定位投影分析与误差分析
考虑到三维坐标和其对应的SRP值通过四维颜色图难以直观表现,将坐标投影到定义的坐标XY平面,平面上每一点的SRP值由三维空间对应的Z轴值求和得到。在B点异响的情况下,进行SRP值的计算,将定义区间内的点投影到定义平面XY,以颜色来衡量SRP值,可得到图9和图10。可以发现,B点附近的SRP值明显高于其他地方,说明应用SRP值来寻找异响点是有效的。
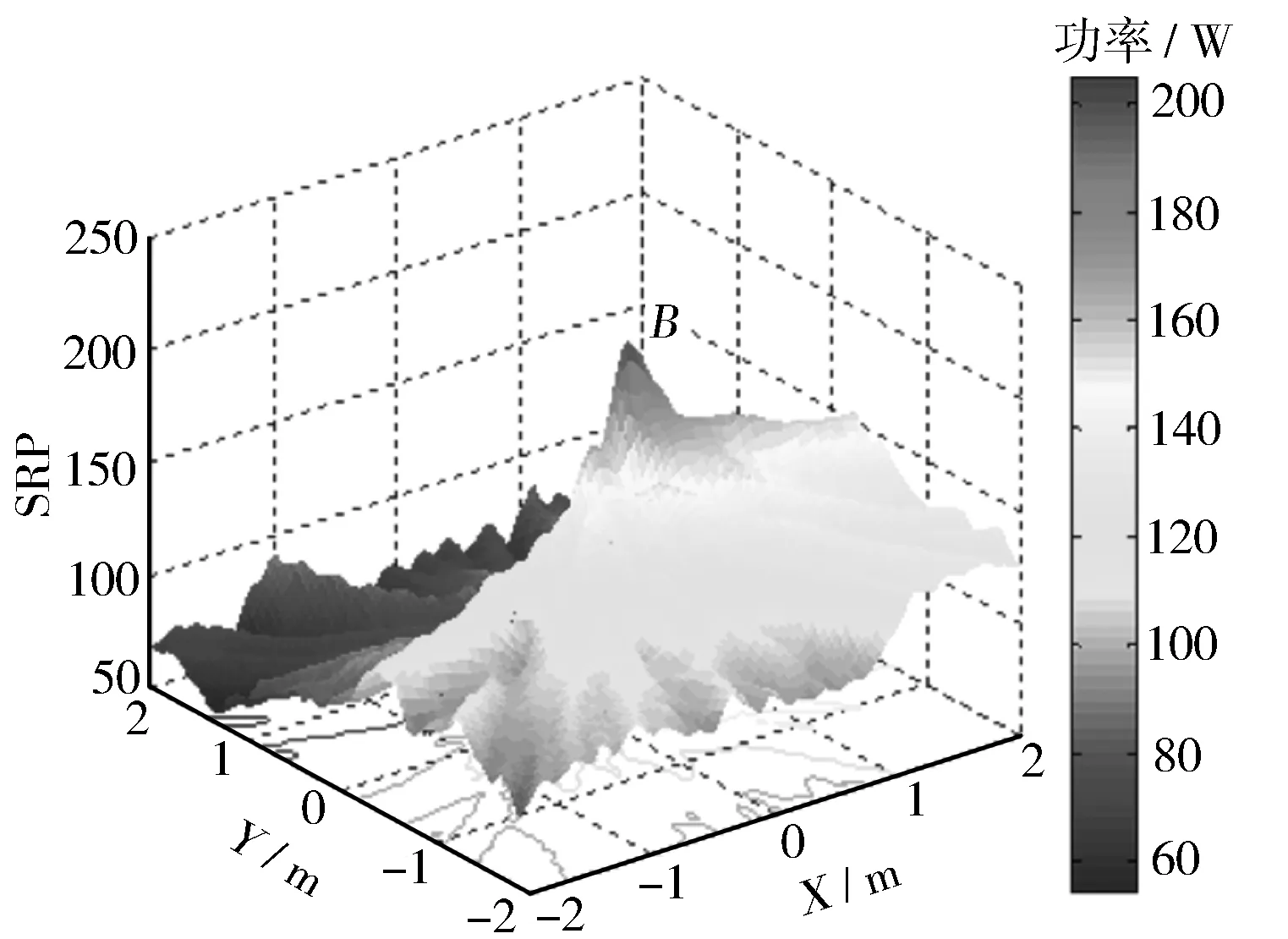
图9 投影平面SRP值(B点异响)

图10 SRP值投影等高图(B点异响)
综合A,B两点的误差可知,进行不同信号长度的算法运算,定位精度也不同。通过与实际测量值的比较,可得各个方向的误差值(见表3)。
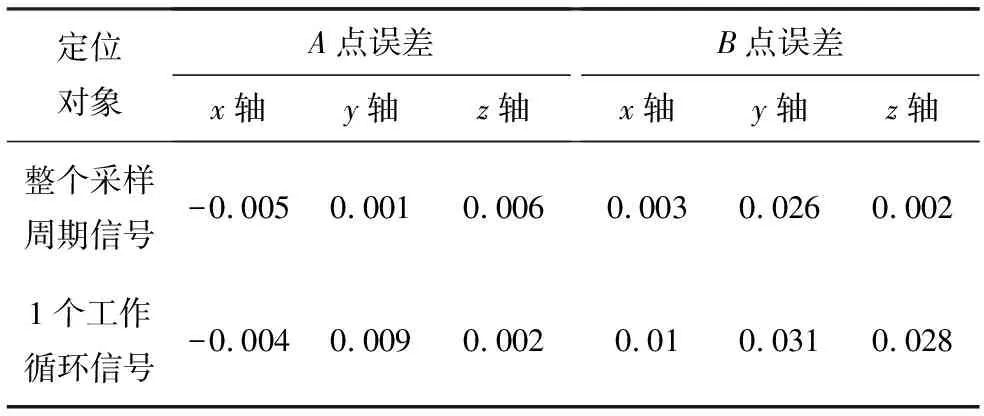
表3 坐标轴上的误差
由误差分析可知,由于声源被简化为点声源,而实际工作中,机械运动的噪声源分布在较广的三维空间,且实验环境中存在发动机多个噪声源以及外部噪声的共同干扰,因此,在不同方向上会出现不同程度的误差,但误差结果小于气缸横向间距,不影响异响噪声源的定位。对于同样的异响噪声源,采集到噪声信号长度越长,包含的噪声源位置信息越全面,定位效果也越佳。
2.4 SRP-PHAT 和SRC-PHAT算法对比分析
分别取A,B两点各1个周期进行算法定位,设置SRP-PHAT搜索间隔0.1 m,定义相同搜索区间,评价指标为定位结果和运算时间(见表4)。再加大搜索精度,将搜索间隔划为0.01 m,SRP-PHAT的运算量过大,受硬件设备条件限制,数据处理平台无法得到运算结果。
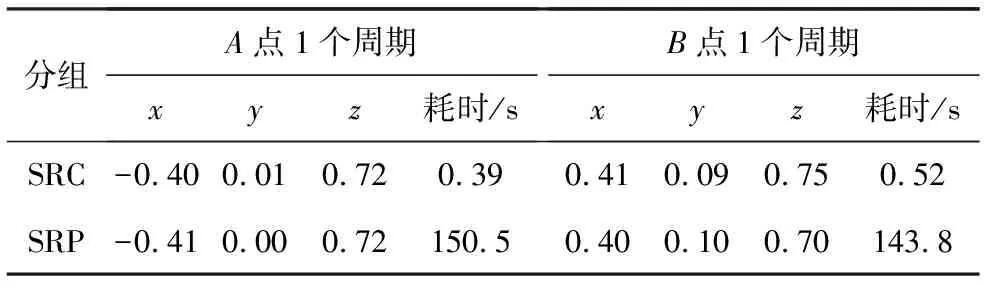
表4 SRP-PHAT与SRC-PHAT对比
可以发现,SRC-PHAT应用于发动机异响故障定位具有良好的准确度。对于SRP-PHAT算法而言,理论上可以得到精度更高的定位坐标,但是具体应用上,需要花费的时间代价也成指数增长,难以实际推广应用。
3 结束语
本研究针对柴油机产生异响难以定位等问题,提出采用A计权系数滤波器对发动机异响噪声信号进行滤波,运用SRC-PHAT算法对发动机异响噪声进行定位的方法。实例表明,A计权系数滤波器能消除大部分人耳不敏感信号,提高“兴趣”信号能量比例。SRC-PHAT算法相对SRP-PHAT算法在处理时效上有较大的改进,运用SRC-PHAT定位算法对柴油机气缸异响噪声定位时,得到的声源位置与实际测量值误差在可接受范围内,该方法可应用于发动机异响定位研究。
猜你喜欢
应用声学(2022年5期)2022-11-21
舰船科学技术(2022年11期)2022-07-15
航空学报(2022年2期)2022-03-29
电子测试(2022年4期)2022-03-17
兵工学报(2021年2期)2021-04-08
汽车工程(2021年12期)2021-03-08
汽车零部件(2019年4期)2019-05-10
农民致富之友(2017年5期)2017-04-06
中国科技纵横(2017年1期)2017-03-10
科技视界(2016年6期)2016-07-12
