
子空间辨识方法在污水处理中的应用
2019-02-09 13:48李明珠占永宁张守兴
时代农机 2019年10期
李明珠,占永宁,张守兴
(海口经济学院,海南 海口571127)
1 引言
随着污水处理工艺的发展,对自动控制水平也提出了更高要求,系统中需要对重要的水质参数和过程控制参数进行在线测量,比如COD、BOD5、TP等。软测量是工业过程控制中用于解决难测参数检测的常用技术,而软测量技术的核心是模型的建立[1]。模型建立的方法有机理分析建模和辨识建模两种。机理模型的优点是在建立模型的时候可以用先验知识进行解释,缺点是建模前需要对对象有深入的了解,建模难度大[2-3]。辨识建模则是根据采样得到的输入输出数据,利用状态估计方法、统计回归分析方法、统计学习理论、人工智能理论等方法得到模型。辨识建模的优点就是不需要知道对象的任何先验知识即可建立模型。子空间辨识具备无需参数化、无需迭代优化,且仅用到简单的数据工具QR和SVR分解等优点,使得子空间在多变量辨识时优势更加明显[4-5]。因此,研究子空间辨识在污水多变量系统建模中的应用有一定的意义。本文研究子空间辨识法在污水处理中的软测量建模,用于预测污水水质BOD5参数。
2 子空间辨识建模
2.1 子空间辨识方法
子空间辨识法是一种对象数学模型的软测量建模方法,由Van Overschee等人于1996年提出,近几十年以来,此方法在过程控制和系统辨识等领域得到了广泛的应用。
子空间辨识法算法的核心思想是,通过构造输入Hankel矩阵和输出Hankel矩阵,再利用其Hankel矩阵分别向“行空间”与“列空间”投影,得到相应的投影子空间,最后经过计算可以得到模型辨识的参数,因此称此方法为“子空间辨识”。
经典辨识和子空间辨识流程如下图1所示。
从图1中可以看出,经典辨识方法是通过获得高阶的复杂模型,再采取模型降阶技术来获得最终的低阶模型。而子空间辨识方法是先通过投影,得到降阶的卡尔曼状态序列或者广义能观矩阵,进而得到一个低阶模型;子空间辨识法利用QR分解、奇异值分解等简单的数学工具来获得系统的状态空间估计,这一点在多变量辨识时,优势更加明显。
2.2 污水系统状态空间模型描述
污水处理是一个MIMO系统,系统的输入数据和输出数据均可通过采样得到。用新息形式表示该系统,则状态空间表达式可以写为:
其中,
输入序列:u∈Rl;输出序列:y∈Rm;
状态序列:x∈Rn;白噪声序列:e∈Rm;

子空间辨识就变成了:通过N个输入输出数据样本,估计出系统的系数矩阵(A,B,C,D)和卡尔曼滤波增益K。
2.3 子空间辨识步骤
子空间辨识的基本步骤如下:
根据测试数据,构造输入输出Hankel矩阵(若要进行变量选择,则在这步之前先选出所需的辅助变量,由选出的数据构成测试数据集)。
再利用输入输出Hankel矩阵分别向“行空间”和“列空间”投影,从而达到去除噪声的目的。经过奇异值分解得到系统的阶次,进一步得到卡尔曼状态系列或广义能观矩阵,然后通过最小二乘法求得系统的系数矩阵(A,B,C,D)和K,即状态空间模型。
将验证数据带入状态空间模型,得到其预测输出。
3 系统仿真分析
将子空间辨识方法建立的软测量模型应用于污水出水水质参数BOD5的预测。数据样本取自加州大学数据库(UCI),UCI数据集中包含31个变量,里面的数据是由城市污水处理厂每天通过传感器采集得到。
将数据集剔除了奇异值和缺失值之后,剩余共有400组数据,包含30列输入和1列输出,输出变量为出水BOD5。将400组采样数据中的300组用来训练模型,剩余的100组用来验证模型的有效性。采用子空间辨识来建立模型,得到的结果如图2所示:
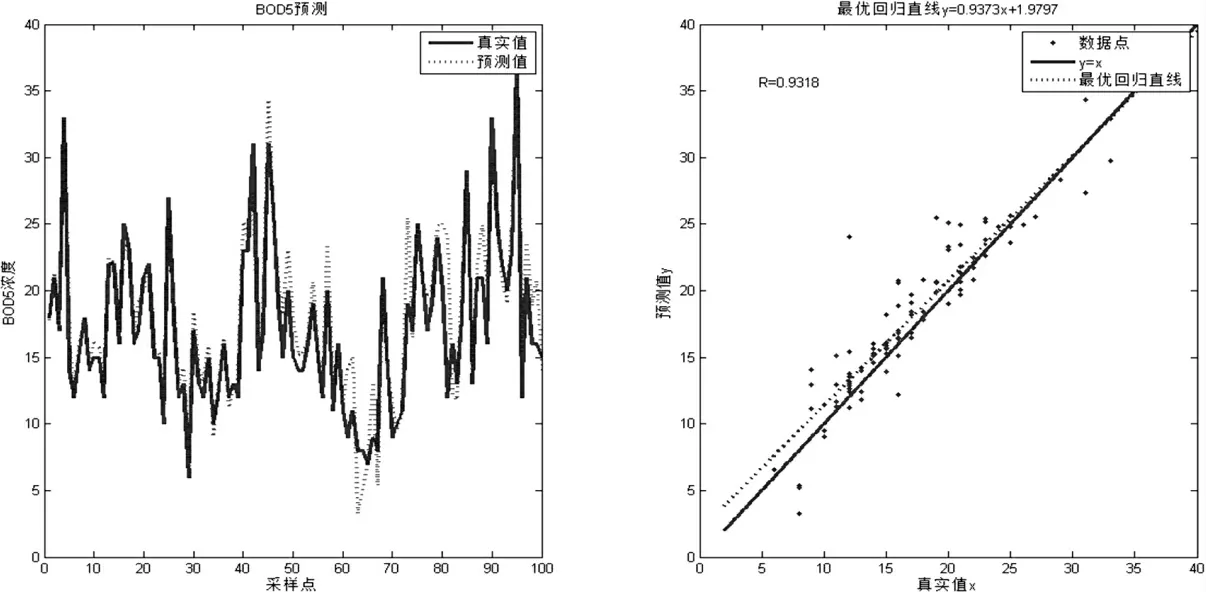
图2子空间辨识建模预测效果图
预测结果如表1所示。

表1子空间建模预测效果
由图2和表1可知,基于子空间辨识建立的模型的预测均方误差(MSE)为5.8551,预测值和实际值的相关系数为0.9318,运行时间0.588444。
4 结语
本文将子空间建模技术应用于污水出水BOD5在线预测,由仿真结果可知,相关系数较高,预测效果较为理想。接下来可以结合辅助变量选择、在线实时模型等方面进一步进行研究,不断提高模型预测精度,减少误差。子空间辨识软测量建模为变量检测提供了新思路,在污水处理中有一定的实际意义和社会价值。
猜你喜欢
小学生学习指导(高年级)(2021年4期)2021-04-29
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
河北理科教学研究(2020年2期)2020-09-11
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
中央民族大学学报(自然科学版)(2016年3期)2016-06-27
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
新高考·高二数学(2014年7期)2014-09-18
