
管道机器人微小厚度高精度测量算法*
2019-03-05 08:05吴啟洪姚如贵王圣尧左晓亚
传感器与微系统 2019年3期
吴啟洪, 姚如贵, 王圣尧, 左晓亚
(西北工业大学 电子信息学院, 陕西 西安 710072)
0 引 言
管道作为城市建设的重要基础设施之一,极大方便了人们的生活。管道环境十分复杂,当管道内部出现质量问题,尤其是维修人员无法进行人工作业的管道,管道的维修和保养就成了一大难题。管道机器人的出现在很大程度上解决了这一难题,管道机器人可以携带各种检测和维修设备进入管道内工作,对管道内部进行检测和维修,以保障管道的安全和畅通无阻[1]。管道机器人经历了从简单“管道猪”、智能“管道猪”到现如今的“管道检测鼠”的发展,管道内的各种检测技术不断完善[2]。
在目前国内石油工业上,管道机器人主要运用于管道内的检测维修作业。油气管道内部的操作与检测一直是油气生产上的重大技术问题,石油科技工作者不断在管道机器人的动力、定位和智能控制等方向上取得新的研究成果[3]。但由于缺少针对管道污垢的高精度测量,在石油、天然气等传输管道内微小污垢的精确清理问题鲜有人关注,相应的清理技术也因此而发展缓慢。精确清理依赖于高精度的测量,本文就磁感应传感器在管道内微小厚度的高精度测量展开了研究。
1 磁感应传感器测厚原理
采用磁感应原理进行测量时,传感器发出的信号经覆盖层进入铁基层后又反射给传感器,覆盖层越厚,则磁阻越大,磁通越小。当磁感应传感器的测量探头接触到待测物体后,磁通的大小影响到感应电动势的大小,通过将该电信号放大后,用来指示覆层厚度。基于磁感应原理的测厚传感器理论上可以测量出导磁基体上任意厚度的非导磁覆层。
磁感应测厚传感器具有校准容易、测量量程大、精度高、测试条件低、可以实现多种功能等优点[4]。近年来,由于陆续引入了微处理器技术及电子开关、稳频等新技术[5],磁感应测厚精度有了很大的提高。本文将磁感应传感器与机器人技术相结合,研究管道内的微小厚度的高精度测量。
2 管道测厚机器人系统设计
2.1 硬件系统设计
将视频模块、测厚模块、交换机以及电路驱动统一使用一个STM32微处理器进行控制管理。视频模块完成摄像头图像的压缩编码和存储;测厚模块为一个稳频调理电路,将传感器信号转换为稳定的方波信号;交换机模块主要负责在无线接入点(access point,AP)、单片机(microcontroller unit,MCU)和视频模块之间完成数据交换的功能;无线AP实现管道机器人与上位机控制软件之间的通信。
2.2 软件算法设计
按照任务设计,管道机器人主要完成微小厚度的高精度测量,而高精度测量需要建立在高精度校准的基础之上。本节重点关注高精度校准的算法设计。算法设计的流程图如图1所示。

图1 软件算法设计流程图
在数据预处理部分,考虑到微小厚度的测量易受到震动、环境的影响,测量值会出现波动,因此引入窗口滤波方法,滤除测量过程中的畸变信号、抖动信号以及干扰噪声等,为后续的高精度校准提供稳定可靠的测量数据。
高精度校准分为静态校准和动态校准两种模式。静态校准主要完成初始的校准,需要人为参与校准过程。而动态校准是针对环境温度、湿度,以及器件特性变化进行的细校准,是在测量中自动完成的。静态校准模式相对比较复杂,这里设计以下三个方法:
1)改进中值滤波器:优化选择出测量数据中的最佳校准值;
2)分段插值:提高多项式拟合所需的样本数;
3)多项式拟合:获取测厚传感器的频率—厚度的多项式表达式。
上述各算法的具体设计将在后续小节进行详细描述。
3 数据预处理
磁感应测厚传感器在进行测量时,传感器信号在经过稳频电路之后转换为模拟方波信号,MCU捕获该信号的频率并表征为被测物体的厚度值。为降低模拟频率信号的畸变、抖动以及噪声等带来的影响,保证在校准阶段测量得到的每一个厚度值的精度都尽可能高,本文将捕获来自稳频电路的频率信号经过一个长度为30的滑动窗口滤波器,当窗口内整体波动不大于某个阈值时,输出窗口的均值。滑动窗口滤波算法实现如下:
设定窗口长度为n=30,窗口波动的最大值为Δ,取长度为30的数组a,其中max=max(a),min=min(a)。
1)测量得到数据Hz,数组右移1位,a[i-1]=a[i];a[29]=Hz;
2)查找出窗口内的最大max和最小值min;
4 高精度静态校准
通过多次反复测量50,100,195,390,798,993,1 288 μm 7个标准样片和零厚度组合得到0~1 288 μm的27组厚度(记为Y),并得到与之对应的高可信度的频率均值Xs,如表1所示,其中,∞对应的是当前环境条件下空闲状态返回的频率值。27组厚度和高可信度的频率均值Xs定性地描述了经稳频电路输出后的频率—厚度特性曲线,在进行静态校准时,Xs是分段插值的参考样本。
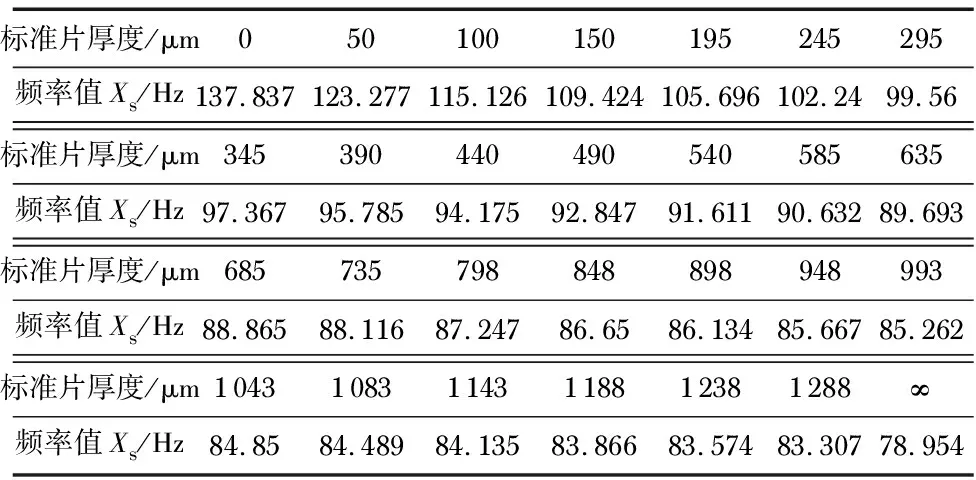
表1 分段插值的参考样本
本节采用改进的中值滤波器进一步进行数据处理,将从中值滤波器输出7个标准片与零厚度对应的频率测量值保存到校准数组Xi中,然后通过对Xi进行分段插值和最小二乘法多项式拟合完成高精度的静态校准。
4.1 改进的中值滤波器
滑动窗口滤波器能够消除模拟频率信号的畸变、抖动以及一些人为带来的影响,但却仅针对单次测量有效,而校准需要对同一厚度值进行多次测量。为了获得更加精准的校准值,提出将滑动窗口滤波器与改进的中值滤波器级联的方法。
传统的中值滤波器仅以一个中间值作为输出,这个输出本身包含测量噪声。为了降低噪声影响,本文进行以下改进:设计了一个窗口,该窗口中只保存中值附近的若干采样,进一步采用窗口中采样的平均值作为输出,以期降低噪声的影响。




通过将窗口滤波器与中值滤波器级联的设计方法,实现了自动依概率优化计算出最佳校准值,尽可能地保证了校准阶段得到的校准值的准确性。
4.2 基于分段插值的最小二乘法拟合
最小二乘法通过最小化误差的平方和寻找数据的最佳函数匹配。综合考虑磁感应传感器的特性曲线、算法复杂度和拟合的符合度,最小二乘法多项式拟合是实现拟合校准最有效的方法之一[7]。
本文通过采用分段插值的方法为拟合提供了足够的样本,然后采用最小二乘法多项式拟合算法得到磁感应测厚传感器的频率—厚度的多项式表达式。
4.2.1 基于传感器特性的分段差值i


1)开始i=0,k=0;




4.2.2 最小二乘法拟合多项式拟合

式中m≤n,一般远小于n。

在兼顾运算复杂度以及获得更低MSE的前提下,参考磁感应传感器输入输出特性,本文在MCU上分段采用了不同阶的最小二成法多项式拟合。在0~150 μm,采用三次多项式拟合;在150~750 μm,采用四次多项式拟合;在750~1 250 μm,采用更高阶的六次多项式拟合。
将MCU上实现的拟合结果输出,通过MATLAB绘图分析,拟合的效果如图 2所示,27组拟合样本值几乎完全落在曲线上,拟合结果的均方误差(mean square error,MSE)仅为1.254 μm。
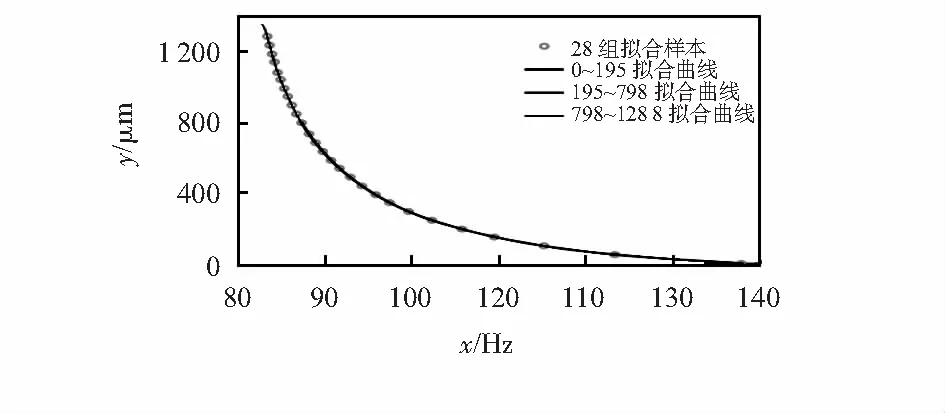
图2 最小二乘法拟合结果
5 测量中的动态校准
静态校准在当前校准环境下具有非常高的测量精度,然而,管道机器人所工作的环境复杂,且传感器容易受到环境因素(如温度、湿度等)的影响,当环境发生变化时,测厚传感器会受到影响而导致测量的精度下降。因此,静态校准存在着较大缺陷,在实际应用过程中可能会导致测量得到的厚度值与真实厚度误差超出容差范围。为了克服上述问题,本文基于测厚传感器的特性设计了在测量过程中动态校准的测量算法。

假设x∞是参考样本Xs中的空闲状态的测量值。动态测量校准算法如下:


动态校准算法实现了磁感应测厚功能在一定环境变化范围内的自动校准功能,在保证了测厚高精度要求的基础上,大大提高了测厚功能的实用性。
6 测量结果与分析
在对管道机器人完成静态校准的前提下,结合动态校准的算法,将管道机器人分别置于0,25,45 ℃三个不同的环境下进行测量。对不同厚度的27个样片都测量了5次以上,将每个样片值的多次测量结果求均值后作为测试的厚度值。在不同测试环境下的测试结果与标准片对比,并将数据通过MATLAB进行误差对比分析,如图4所示。
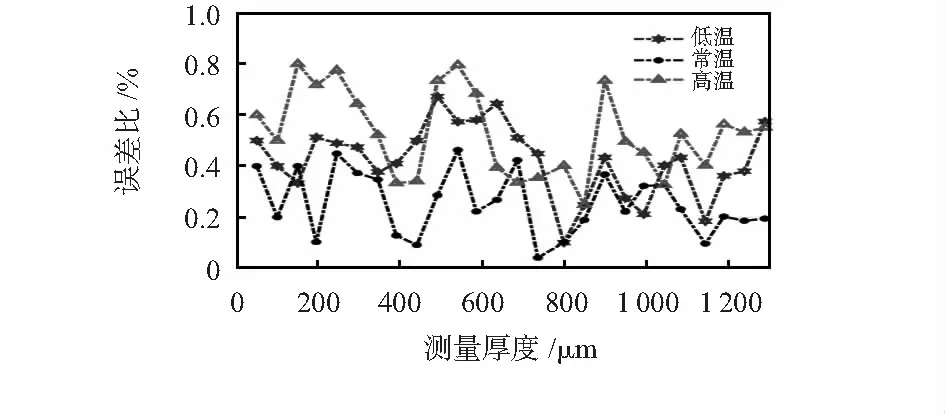
图4 不同温度环境下的测量误差
由于受到环境温度的影响,测厚传感器发生了漂移。经过动态校准调整后,在0 ℃的低温环境下,测量值整体偏低一些,测量误差不超过±(1 %+1)μm;常温下,测量误差都在±(5 ‰+1)μm的范围内;当环境温度较高时,测量结果误差偏大,但仍能保证±(1 %+1)μm的精度范围内,满足任务要求。
7 结 论
针对微小厚度高精度测量需求,本文从数据的预处理、静态校准和动态校准三个方面展开对管道机器人微小厚度的高精度测量算法研究。采用了窗口滤波器的方式对测量数据进行预处理。通过采用改进的中值滤波器、分段插值和最小二乘法多项式拟合完成对管道机器人的静态校准,以较低的复杂度实现较小的均方误差。最后提出动态校准的测量算法,实现了在一定环境温度变化范围内的自动校准,保证了系统功能的高精度要求,大大提高了测厚功能的实用性。实际测量数据表明:本文所提算法在正常工作温度(0~45 ℃)下,非常好地解决了温度漂移和环境变化等因素带来的影响。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
传感器世界(2022年6期)2022-11-25
电子制作(2019年11期)2019-07-04
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
电子制作(2018年16期)2018-09-26
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
