CT导航下的机器人辅助穿刺定位方法
2019-04-04 07:38陈光彪付庄张铁锋沈运王尧施韦伊费健
西安交通大学学报 2019年4期
陈光彪,付庄,张铁锋,沈运,王尧,施韦伊,费健
(1.上海交通大学机械系统与振动国家重点实验室,200240,上海;2.上海市宝山区大场医院,200436,上海;3.上海交通大学医学院附属瑞金医院,200025,上海)
经皮穿刺作为一种微创介入手术,具有创伤小、靶向性强等优点[1-3],被广泛应用于人体组织活检及药物定向治疗等场合[4]。近年来,为了提高经皮穿刺手术的精度并且改善医生繁重且充满X射线辐射的徒手穿刺操作,机器人辅助穿刺技术逐渐得到了更多的研究和实际临床应用[5-12]。机器人辅助穿刺包括病灶区域定位、穿刺针定位、穿刺针路径规划和穿刺进给等步骤,其中,病灶区域和穿刺针的定位是穿刺中的关键技术,是保证穿刺精度的基础。
目前流行的病灶定位方式是通过商用的高精度无框架式立体定位系统,如电磁、光学等定位系统[13-15],对机器人坐标系与CT坐标系的变换关系进行自动或半自动标定,从而实现病灶点在机器人坐标系下的定位。但是,商用定位系统一方面价格昂贵且对手术室有特殊要求,另一方面安装、操作复杂,操作者学习成本高,而穿刺针的术前定位则是基于远端运动中心(remote center of motion,RCM)机构实现[6,16],可机械式地保证穿刺针针尖绕进针点转动,从而调整穿刺针姿态至指向病灶点,但RCM机构结构复杂并且标定费时费力。
为了解决上述问题,本文在不借助外界定位系统的情况下,利用坐标变换理论建立病灶区域定位方法,并搭建机器人辅助穿刺系统对该定位方法加以验证。本文病灶定位方法根据3个不共线标记点在CT坐标系及机器人坐标系下的坐标,求解出2个坐标系之间的坐标变换矩阵,然后将CT坐标系下病灶点映射至机器人坐标系下,从而快速精确地实现病灶点在机器人坐标系下的定位。在此基础上,结合机器人运动学,通过软件方法设计RCM结构可实现的穿刺针的全向定位,即让穿刺针保持指向病灶位置的姿态,通过穿刺针的全向定位,可快速地确定安全、合适的进针点和穿刺针角度。除特殊说明,本文所述机器人坐标系均指机器人基座坐标系。
1 病灶区域定位
(1)


图1 病灶定位实现流程图
1.1 旋转变换矩阵的求解
当患者平躺在CT床上进行CT扫描时,先在患者体表选取不共线的3点M1、M2、M3并贴上磁片作为标记点。然后,利用M1、M2、M3这3个标记点建立过渡坐标系M1-XMYMZM,如图2所示:以M1为原点;以点M1指向点M2的向量DM1M2为XM轴正方向,其单位矢量为e1;以向量DM1M2与由点M1指向点M3的向量DM1M3的向量积为ZM轴正方向,其单位矢量为e3;以e3与e1的向量积为YM轴正方向,其单位矢量为e2。{e1,e2,e3}在CT坐标系OC-XCYCZC下的坐标表示分别为
(2)
式中:|·|表示向量的模;
(3)
(4)
将{e1,e2,e3}在CT坐标系OC-XCYCZC下的坐标表示简记为
(5)
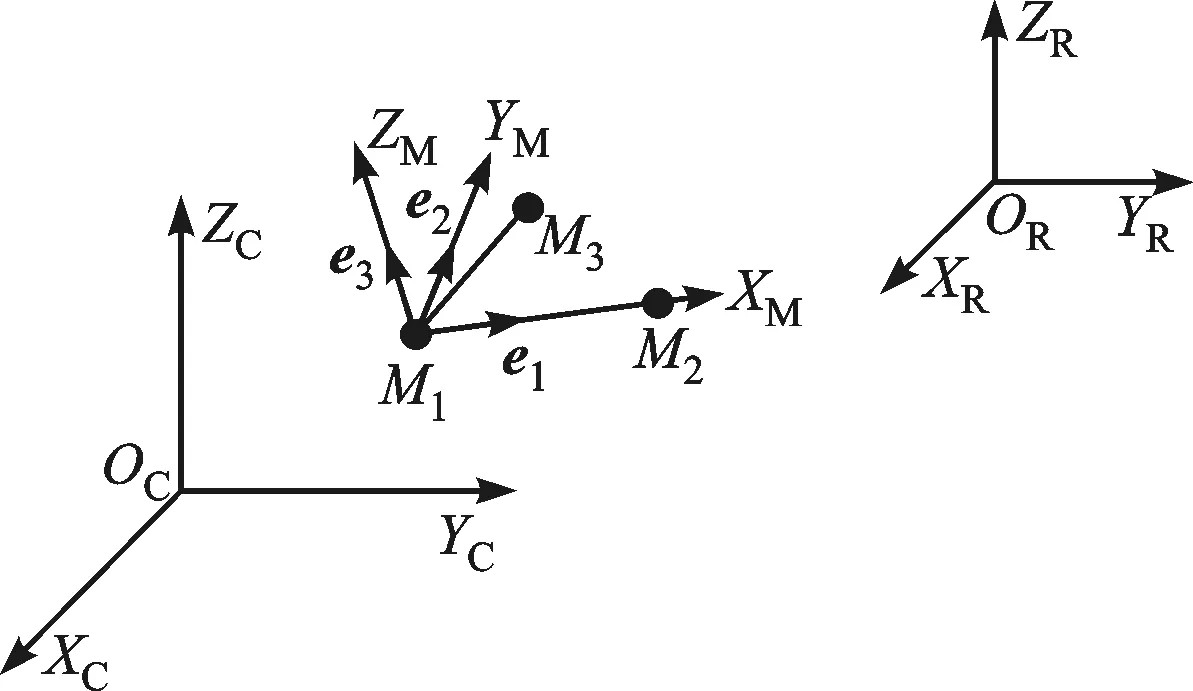
图2 标记点及过渡坐标系示意图
由于{e1,e2,e3}是过渡坐标系M1-XMYMZM的3个坐标轴方向上的单位向量,根据式(5)可以确定过渡坐标系M1-XMYMZM到CT坐标系OC-XCYCZC的旋转变换矩阵表示为[19]
(6)
同理可得过渡坐标系M1-XMYMZM到机器人坐标系OR-XRYRZR的旋转变换矩阵为
(7)
(8)
1.2 平移变换矩阵的求解
(9)

2 穿刺针全向定位
基于前文病灶中心f在机器人坐标系下的坐标,开展对穿刺针的全向定位方法的研究。首先,本文所述穿刺针的全向定位,指的是在穿刺针针尖与病灶区域中心保持一定距离r的情况下,尽管对穿刺针的穿刺角θ和方位角β有所调整,但穿刺针始终保持指向病灶区域中心f的姿态,即病灶中心f与穿刺针始终保持共线。
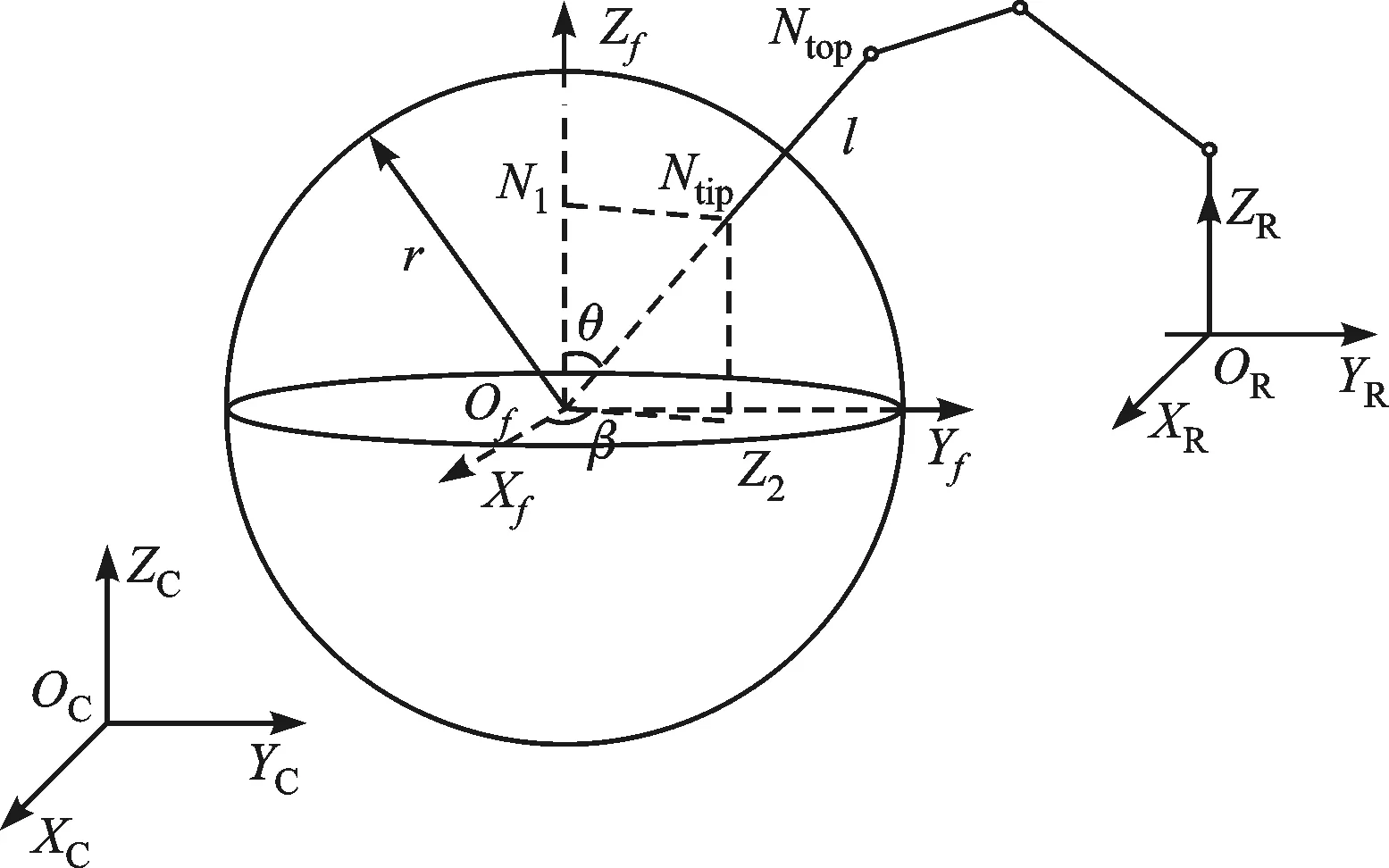
图3 穿刺针全向定位模型
如图3所示的穿刺针全向定位模型中,NtopNtip表示穿刺针,其长度为l,其中Ntip为穿刺针的针尖,Ntop为穿刺针顶端。并且针尖Ntip与病灶中心f的距离为r,即针尖Ntip始终位于以病灶中心f为球心,半径为r的球面上。以病灶中心f为原点建立局部坐标系Of-XfYfZf,其3个坐标轴的方向分别与CT坐标系OC-XCYCZC的坐标轴方向保持同向。N1,N2分别为针尖Ntip在Zf轴和OfXfYf平面的投影点。由点Of指向点Ntip的向量DOfNtip与Zf轴正向之间的夹角θ定义穿刺针的穿刺角,由点Of指向点N2的向量DOfN2与Xf轴正向之间的夹角β定义为穿刺针的方位角。
因此,针尖Ntip、穿刺针顶端Ntop在坐标系Of-XfYfZf下的坐标表示分别为
(10)
(11)

(12)

(13)
因此,针尖Ntip、穿刺针顶端Ntop在坐标系OR-XRYRZR下的坐标表示分别为
(14)
(15)
当穿刺针处于全向模式时,由式(14)(15)可以求出此时针尖Ntip、穿刺针顶端Ntop在坐标系OR-XRYRZR下的坐标,从而可以确定此时穿刺针在机器人坐标系下的位置和姿态。最后,根据辅助机器人的逆运动学的求解结果控制机器人使穿刺针到达对应位姿,从而实现穿刺针的全向定位。全向定位的意义在于可方便地调整穿刺针的穿刺角和方位角以规避穿刺路径中的重要组织和器官,为安全进针点、穿刺角度的确定以及穿刺针的路径规划提供便利。
3 实验验证
3.1 病灶定位方法验证
3.1.1 实验设备 实验设备主要包括CT机、UR3机械臂、患者模型(含标记点和病灶)以及刚性穿刺针等。实验中使用的CT机由上海市宝山区大场医院提供,型号为SIEMENS SOMATOM Emotion,是目前国际先进的16层螺旋CT机,如图4a所示;使用的辅助穿刺机器人为UR3机械臂,具有6个自由度,其末端同轴安装刚性穿刺针,如图4b所示。

(a)SIEMENS CT机 (b)UR3辅助穿刺机械臂图4 实验设备图
如图5所示,实验中用规则的硬纸箱代表患者,在纸箱的上表面取3个点A、B、E以及侧面取2个点C、D作为标记点并贴上磁片。在活体实验时,可以在活体皮肤等相对位置较为固定的地方贴上3个不共线的磁片作为标记点。在纸箱内部安装螺栓,以螺栓末端中心点作为病灶位置,如图5a所示。其中,在纸箱内部安装有3个不同高度的螺栓,其末端中心点H、M和L分别代表3个不同的病灶位置。
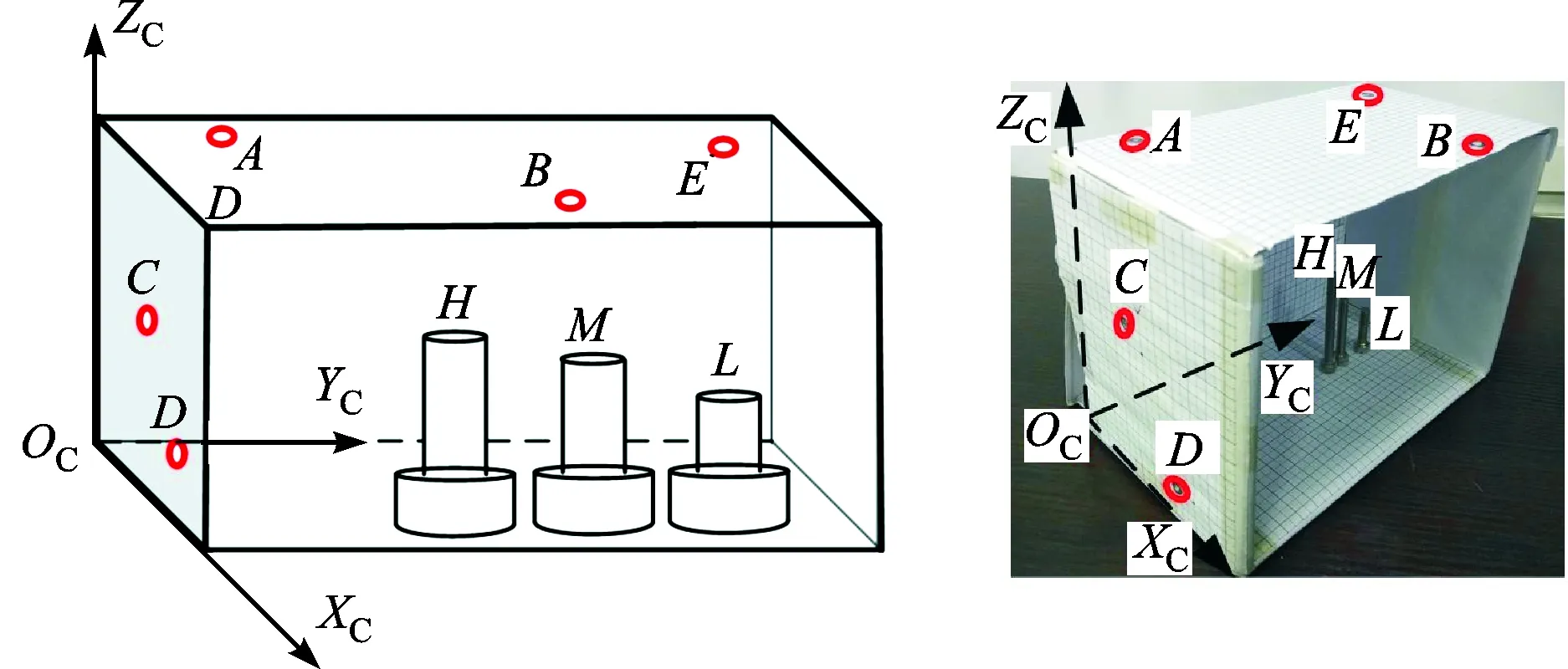
(a)三维模型示意图 (b)实物图图5 病灶区域及标记点分布图
病灶定位方法验证实验主要包括标记点及病灶位置在CT以及机器人坐标系下坐标的获取2部分。因实验条件有限,本实验中CT机未和UR3机械臂组成穿刺系统,其中CT坐标系下坐标的获取在医院利用CT机完成,而机器人坐标系下坐标的获取利用实验室UR机器人完成,但是并不影响实验数据的有效性以及病灶定位方法在活体实验中CT系统与机器人系统构成在线穿刺系统下的适用性。
3.1.2 CT坐标系下坐标的获取 由于本实验所使用的CT机没有系统坐标系,因此需外部建立CT坐标系。如图5所示,以纸箱内腔的一个顶点为OC原点,其所在的3条棱为坐标轴建立CT坐标系OC-XCYCZC,其中坐标轴OCXC的方向与CT床的运动方向平行。活体实验中,CT坐标系可以是CT系统自带的坐标系或按此方法在外部物体上建立。
利用CT机对纸箱进行CT扫描,得到一系列如图6所示的沿坐标轴OCXC方向的等距离CT扫描图,且前后2张CT图的间距为5 mm,并将首次出现平面OCYCZC的CT图的序号设定为1。
标记点A在CT坐标系下坐标的获取方法如下:①序号1的CT图的x轴坐标为0,标记点A出现在如图6所示的CT图中,该CT图序号为3,因此A的x轴坐标为10 mm;②通过CT图像分析软件提供的比例尺、测距功能来提取A的Y轴、Z轴坐标,分辨率为1 mm。如图6所示,沿纸箱内边做出平面OCYCZC以及A点在YC轴和ZC轴上的垂足AZ和AY,测距得到线段AAZ和AAY的长度分别为20 mm和147 mm,故A点的Y轴、Z轴坐标分别为20 mm和147 mm。
依照标记点A的方法,可分别得到其他标记点B、C、D、E以及3个病灶位置L、M、H在CT坐标系下的坐标,如表1所示。
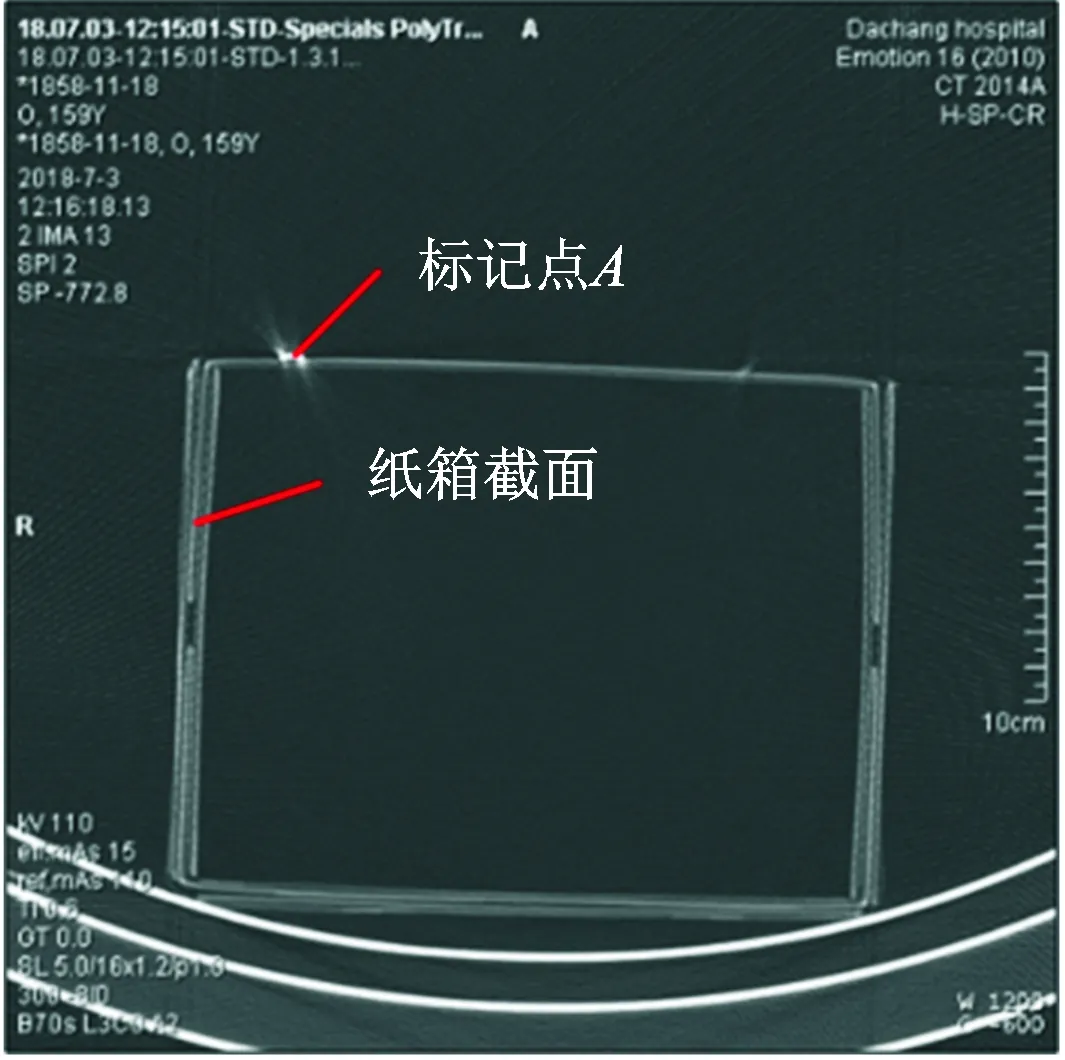
(a)A点所在的CT图
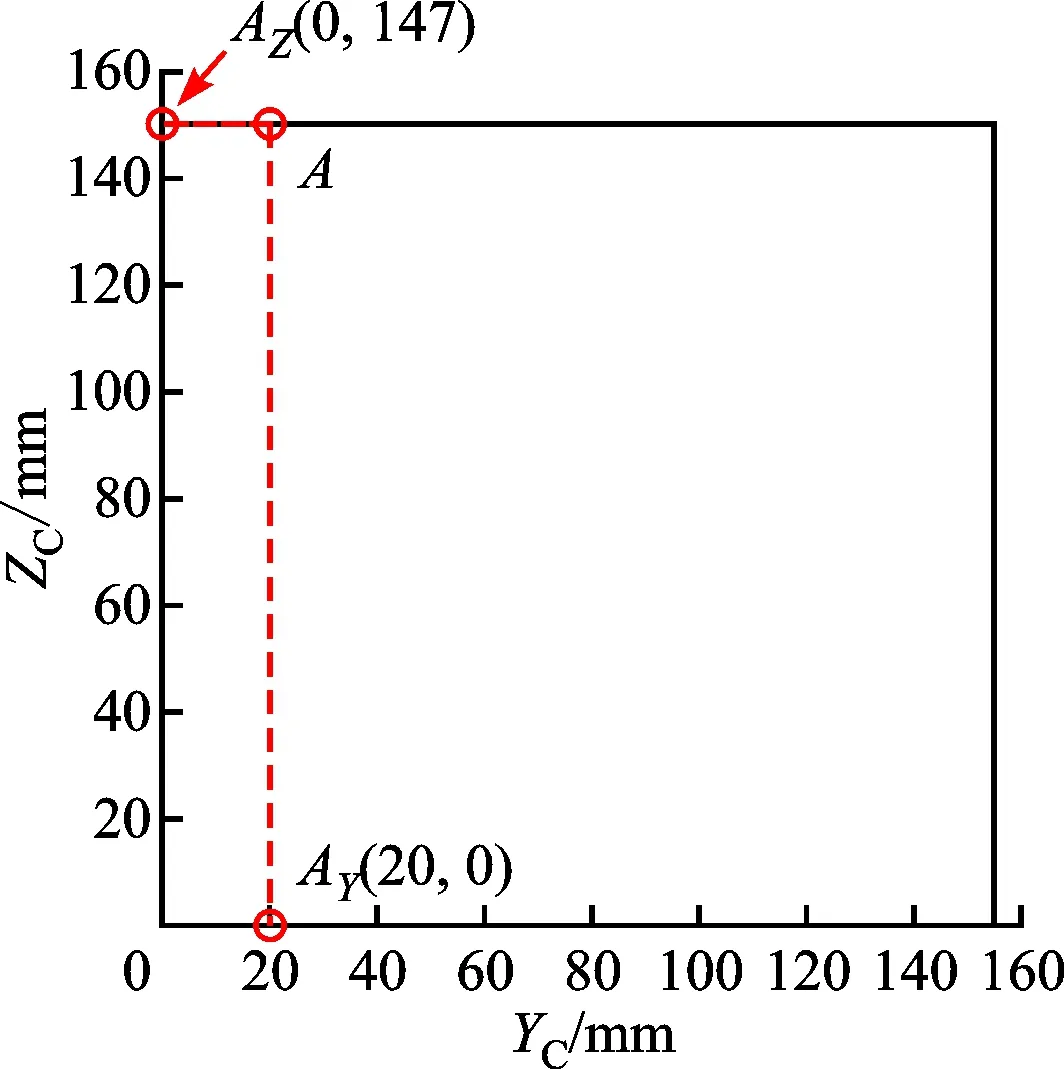
(b)CT下A点坐标获取操作图图6 CT坐标系下A标记点坐标获取方法
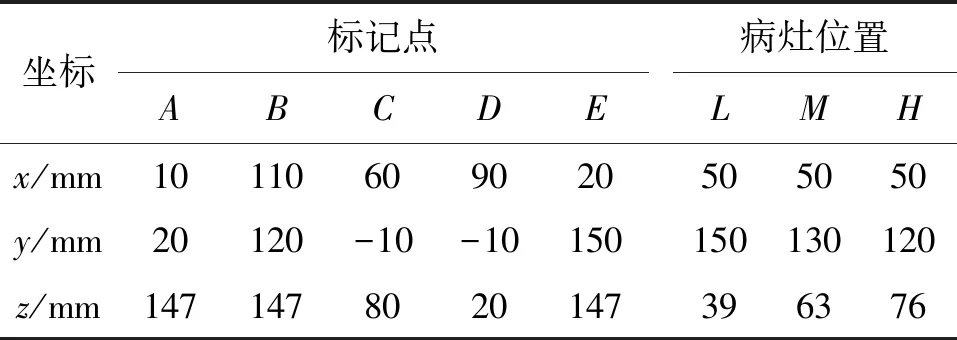
坐标标记点ABCDE病灶位置LMHx/mm10110609020505050y/mm20120-10-10150150130120z/mm1471478020147396376
注:x轴坐标分辨率为5 mm;y、z轴坐标分辨率均为1 mm。
3.1.3 机器人坐标系下坐标的获取及定位结果 标记点及病灶点在UR3机械臂坐标系下的坐标利用“针尖触碰法”采集,具体包含以下步骤:
(1)测量穿刺针针尖到机械臂末端法兰端面的距离l=401 mm,将针尖设置为机械臂的工件中心点(TCP),其位置相对默认TCP的偏置值为(0,0,401) mm,姿态保持默认值,机械臂默认的TCP点为端面法兰中心;
(2)控制机械臂运动使得针尖依次触碰各标记点及病灶位置,并从机器人控制界面读取此时针尖在机器人坐标系下的坐标即为对应标记点或病灶位置在机器人坐标系下的坐标。
因此,将纸箱放置在机器人坐标系下,利用上述“针尖触碰法”可分别得到标记点A、B、C、D、E以及3个病灶位置L、M、H在机器人坐标系下的坐标。通过3个标记点和不同病灶位置点的不同组合方式,进行了多组对比实验。第1组实验是选取A、B、C这3个标记点,分别对3个病灶位置L、M、H进行定位,所记录的坐标数据如表2所示,病灶位置的定位结果如表3所示。第2组实验固定病灶位置为M,依次选取A-B-C、A-B-E以及A-C-D这3组标记点进行定位实验,所记录的坐标数据如表4所示,病灶M的定位结果如表5所示。
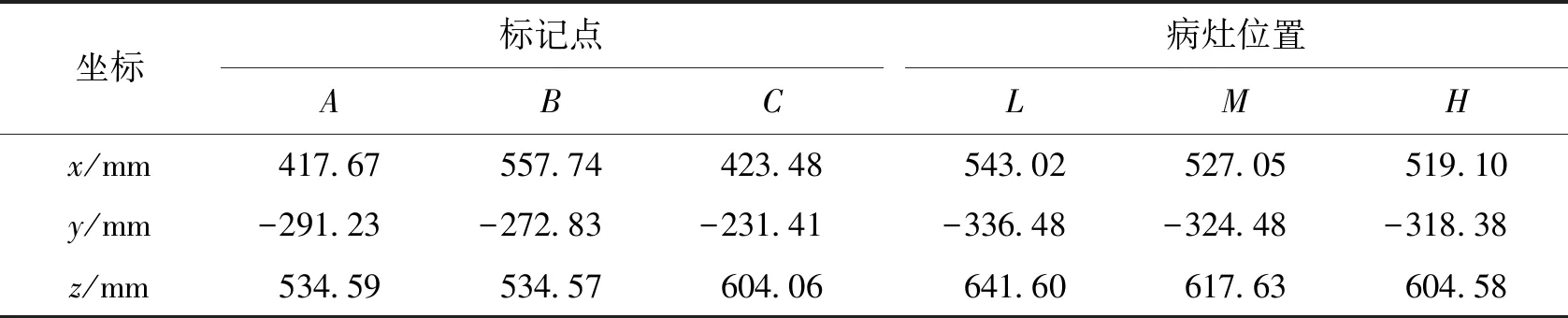
表2 标记点及病灶位置在机器人坐标系下的真实坐标

表3 A-B-C标记点组合下病灶位置L、M、H的定位结果
注:各方向绝对定位误差为各方向坐标预测值与真实值之差的绝对值,总定位误差为各方向绝对定位误差平方和的算术平方根。

表4 3组标记点组合中各标记点及病灶M在机器人坐标系下的真实坐标

表5 3组标记点组合下病灶M的定位结果
此外,以表4中A、B、C、D、E标记点,M病灶位置为例,对本文基于3个标记点病灶定位方法和基于4个、5个标记点的最小二乘法的定位精度进行比较,其中A-B-C组合采用本文病灶定位方法,A-B-C-E及A-B-C-D-E组合采用最小二乘定位法,结果如表6所示。
由表6可知,随着标记点的增加,基于最小二乘定位方法定位误差逐渐降低。本文病灶定位方法与基于5个标记点的最小二乘定位方法定位精度相近,但定位效率约提升40%。
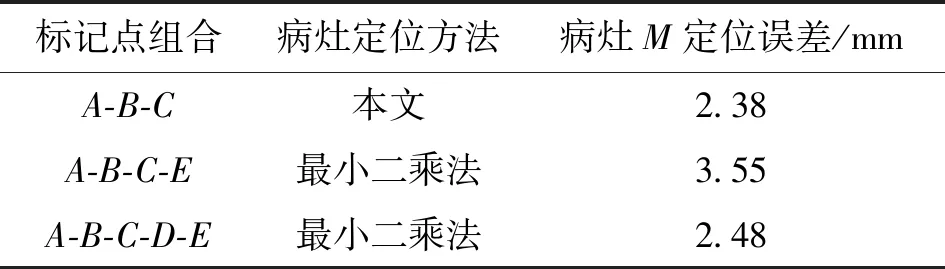
表6 本文定位方法和最小二乘定位方法的定位误差
3.2 误差分析
由表3、表5的数据可以看出:本文建立的病灶定位方法误差在3 mm以内,其中表5中标记点组合3(A-C-D)定位误差较大,这是因为标记点A、C、D的位置接近一条直线,矩阵存在病态。因此,选取标记点时应避免标记点分布在一条直线上及其附近区域,这一点在临床上是容易满足的;或者通过增加标记点数量,通过其中3个标记点的不同组合来减小因某3个标记点共线造成的过大的定位误差。
实验的误差来源主要包括定位方法的计算误差、机器人运动控制误差以及穿刺针变形、末端针尖抖动等外部因素造成的误差3个部分。
ein=
(16)

以表2记录的第1组实验中标记点的坐标数据为例,计算得到定位方法的计算误差如表7所示。由表7及式(16)可知:基于3个不共线标记点的病灶定位方法的计算误差为各点计算误差的均值,约为1.43 mm。因此,在保证一定精度的情况下,该病灶定位方法可以快速实现病灶区域的定位。
3.2.2 机器人运动控制误差 本实验所用UR3机械臂的运动控制采用位置型阻抗控制方法:由机械臂末端的刚度系数矩阵、阻尼系数矩阵、位置偏差、速度偏差及雅可比矩阵得到各关节力矩控制量并求解关节动力学方程得到关节实际角度和速度,利用正运动学和雅可比矩阵将其转换为末端实际位置和速度并负反馈至末端期望位置和速度得到位置偏差和速度偏差。其中,动力学方程中惯量、阻尼等参数利用最小二乘法辨识。
因此,运动控制误差主要包括动力学参数辨识误差以及基于偏差的负反馈控制方法的误差。综合而言,本实验所用UR3机械臂的控制误差为0.1 mm。
3.2.3 穿刺针变形、抖动等外部因素 在针尖触碰获取标记点及病灶位置在机器人坐标系下的坐标的过程中,针尖抖动及穿刺针变形都会使坐标数据存在误差。此外在临床穿刺手术中,由患者呼吸等引起的病灶、标记点的抖动也会造成标记点和病灶相对位置的不稳定性。这些外部因素都会给病灶定位带来误差。为了有效减小由外部因素造成的误差,进行病灶定位时,可以在患者皮肤表面加装紧固装置以及使用刚度更高的穿刺针。
3.3 穿刺针全向定位的实现
根据表3,当标记点组合为A-B-C时,病灶位置M在机器人坐标系下的预测坐标为(528.96,-325.92,619.34) mm。以病灶M为例,介绍穿刺针全向定位在UR机械臂下的一种实现,具体步骤如下。
(1)设定全向定位模式下进针点即针尖Ntip与病灶位置M的安全距离r=150 mm;与穿刺针共线且远离机器人处的一虚拟点M′,M′点与针尖的距离为r。将虚拟点M′设置为机械臂的TCP点,依据安全距离r与针尖到机械臂末端法兰端面的距离l=401 mm,将其位置相对默认TCP的偏置值定为(0,0,551) mm,姿态保持默认值。
(2)控制机械臂运动使得机械臂TCP点在机器人坐标系下的坐标为M的预测值,即与预测的病灶位置重合。
(3)控制UR机械臂保持TCP点的位置不变,通过改变TCP点的姿态来调节穿刺针的穿刺角θ及方位角β,从而实现穿刺针的全向定位。
活体实验时,安全的穿刺角θ及方位角β需结合CT影像中组织器官的分布及CT坐标系综合确定。假设安全穿刺角θ=10°,安全方位角β=45°,由式(14)(15)可得此时安全进针点即针尖Ntip在机器人坐标系下的坐标为(554.75,-322.40,471.62) mm,穿刺针顶端Ntop在机器人坐标系下的坐标为(623.69,-313.01,76.70) mm,从而可确定安全的进针点和进针方向。

表7 本文病灶定位方法的计算误差(以第1组实验为例)
4 结 论
(1)基于3个不共线标记点建立了病灶定位方法,在此基础上结合机器人运动学,利用软件方法提出了一种穿刺针的全向定位技术;利用UR机械臂搭建了辅助穿刺系统,并进行了病灶定位的验证实验,同时利用UR机械臂实现了穿刺针的全向定位。
(2)在不借助外部定位系统的情况下,病灶定位误差在3 mm以内,与基于5点的最小二乘定位法精度相当,但定位效率提高约40%,其中定位方法自身的计算误差约为1.43 mm,验证了该方法的有效性和准确性,可为穿刺手术提供良好的精度基础。
(3)在临床病灶定位中,采用紧固装置或使用刚度更高的穿刺针等改进措施,可减小患者呼吸、针尖抖动以及穿刺针变形等因素对标记点及病灶点坐标数据稳定性的影响,从而保证病灶定位精度。
猜你喜欢
计量学报(2022年11期)2022-12-20
中国医疗器械杂志(2022年5期)2022-12-06
计量学报(2022年4期)2022-05-26
导航定位学报(2022年2期)2022-04-11
中华神经创伤外科电子杂志(2020年3期)2020-07-07
中国实用医药(2019年33期)2019-12-30
电子制作(2019年14期)2019-08-20
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
少年文艺·开心阅读作文(2017年7期)2017-08-05