基于蜂窝移动网的无人机监管系统设计与实现
2019-07-15 11:18庄子艾刘文豪姜胜明
计算机应用与软件 2019年7期
庄子艾 程 欣 刘文豪 姜胜明
(上海海事大学信息工程学院海洋互联网实验室 上海 201306)
0 引 言
科技的进步使得更多的人能够体验无人机带来的乐趣,但民用无人机飞行存在飞行区域不明确、侵犯隐私、有安全隐患等问题,“黑飞”和“扰航”事件时有发生。这严重影响了国土防空和飞行安全,制约了低空空域的开放和通用航空的发展。
对民用无人机实施有效监管,主要存在无人机飞行有“低小慢”等特点,无人机数量巨大和种类繁多,且不断增加;无人机操控员往往没有经过培训与考核,很多用户无证飞行等问题。
国外早期比较完善的无人机监管系统是美国在 2010 年发布的Mission Planner[1],可以远程控制无人机飞行,查看历史飞行数据,但只适用于Windows平台。2017年,美国AirMap公司提供了一个无人机飞行管理系统,针对500 ft(1ft=0.304 8 m)低空空域,将用户、机场、航空管理部门、无人机制造商的信息统一处理,并将这些数据提供给第三方,实现了对无人机的分类监管[2]。任丽艳等[3]提出的无人机飞行监管系统可以实现无人机实时监管、查看飞行记录和管制区域等。刘洋等[4]和郭杰等[5]提出的无人机综合监控系统都实现了对无人机的路径规划,可远程发送控制指令并在平台查看。目前国内的民用无人机监管系统,没有考虑民用无人机的实时性、特殊性,且大多功能单一,不能实现对无人机的有效预警,所以很难在单一平台下进行全面监管,亟需一种有效的无人机监管模式和动态响应的无人机监管系统,逐步实现民用无人机的动态监管。
总结国内外无人机监管经验和现有方案的不足,本文提出了一种基于蜂窝移动网的无人机实时智能监管与预警系统。本系统可在智能手机、平板电脑、台式机等多平台下兼容;通过无处不在的蜂窝移动网实现了对无处不在的无人机的实时监管;采用预警算法,对即将进入禁飞区或有碰撞风险的无人机进行预警;对无人机操作人员进行身份验证,能够禁止不具备无人机驾驶资质的人员操作无人机,为民用无人机的有效监管提供了一种解决方案。
1 总体方案设计
系统划分为数据收集与发送端、云数据中心、监管平台三大模块,采用蜂窝移动网络作为整个系统的通信链路和数据传输方式,如图1所示。对于即将进入禁飞区或存在碰撞风险的无人机,系统持续向用户发送短信预警,并将已经飞入禁飞区的无人机进行记录存档,从而实现对无人机的监管。

图1 系统总体设计框图
1.1 数据收集与发送端
对无人机的有效监管建立在实时数据的基础上,通过无人机提供的数据接口得到相关无人机的数据信息,这些数据信息包括:经度、纬度、高度、速度等基本信息,以及横滚角、俯仰角、偏航角等无人机的姿态信息。
无人机通过无线数据链路与遥控器连接,通过2.4/5.8 GHz Wi-Fi天线与遥控器进行控制指令、数据信息的交换。APP连接遥控器后,能够在地面实时获取无人机的经纬度、高度、速度等信息,通过终端的蜂窝移动网络通讯,将数据实时传输到云数据中心,系统有效通信范围可达到7公里左右。
1.2 云数据中心
云数据中心主要负责数据存储、数据转发、在线监管和预警功能的实现。中心通过蜂窝移动网络接收所有在线无人机的实时数据信息后,会在云端为不同的用户开辟一个独立的存储空间,每一个飞行架次对应一个飞行记录日志文件,存储任意架次无人机的所有飞行数据信息,为监管云平台提供无人机飞行历史记录和实时飞行数据信息,为在线飞行用户提供精确的实时飞行监管服务[6]。
无人机预警功能基于对无人机与禁飞区之间的位置关系、无人机与无人机之间的位置关系判定。云端在接收到在线无人机数据之后,通过禁飞区预警算法判断无人机飞行轨迹与禁飞区域的位置关系,以及碰撞风险预警算法判断无人机之间的相对运动关系是否处于安全限制[7]。云数据中心向有进入禁飞区或碰撞风险的无人机发送预警信息。
1.3 监管平台
系统针对管理员用户和普通用户需求提供服务,如图2所示。管理员用户具有较高权限,能够对所有登录系统的无人机进行监管,具备划定禁飞区、飞行计划审批等功能;普通用户可在Web端查询禁飞区,向系统提交飞行计划申请,可查看无人机的实时飞行状态、飞行的历史记录等。
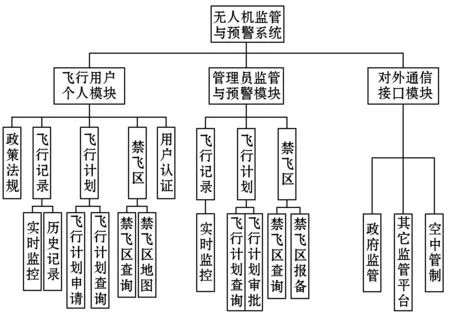
图2 系统功能模块
此外,为满足其他监管部门对无人机飞行数据的需求,后台开放数据接口,可以通过接口获得需要的飞行数据。
2 系统实现
用户登录系统需要注册填写用户名、设备码,以实现系统和无人机的绑定。登录成功后,在用户认证界面上传用户的身份证、无人机驾驶证等有效证件,实现了系统和用户身份的绑定。两次身份验证,确保具有无人机驾驶资质的人员才可操控无人机,保证了在发生非法飞行事件时能够快速、有效地确认涉事无人机及责任人。
系统将无人机飞行中的实时数据上传到云数据中心,Web端获取云数据中心的数据,实现实时位置显示、轨迹回放等功能。系统开发环境如表1所示。

表1 系统开发环境
2.1 实时动态轨迹显示
Web端通过百度地图API,加载嵌入的地图界面。通过调用相应的API接口来实现地图控件、覆盖物、滚动缩放以及地图类型转换等功能。前端界面不断接收后端服务器实时传送的经纬度数据信息,将覆盖物绘制在地图上。通过数据实时更新,实现无人机实时动态轨迹显示。绘制流程如图3所示。

图3 无人机实时动态轨迹实现流图
2.2 历史记录及轨迹回放
无人机飞行的实时姿态信息和位置信息都保存在云数据中心,通过Socket创建与移动端和无人机端的的数据连接,通过蜂窝移动网将数据实时传输至云端,并将数据保存至云端数据库和飞行日志中,同时通过Ajax和Websocket将无人机的飞行记录信息推送至前端页面显示。在历史记录界面中,管理员用户拥有查看平台下所有无人机飞行记录的权限,普通用户可查看本人名下在录无人机飞行的历史记录。云端保存飞行历史数据,有助于后台的统一监管和后续处理,实现了对无人机的有效监管,在发生事故时有据可考。图4为历史记录及轨迹回放的数据流图。
2.3 飞行计划申请
为了进行无人机的批量监管,我们提供了飞行计划申请服务。普通用户能够进行飞行计划申请和查询,前端通过Layui框架设计实现了飞行计划申请的表单信息输入与提交,通过前后端双重验证用户提交的表单,将用户申请的飞行计划信息存储到云数据中心,云数据中心对数据进行预判别。对于包含禁飞区的飞行计划申请,后台直接审批不通过,其他飞行计划申请,由管理员统一审批是否通过。审批结果,由后台推送至普通用户的飞行计划查询界面,可供用户查看。飞行计划申请、审批流程如图5所示。

图5 飞行计划申请、审批流程
3 预警算法
3.1 禁飞区预警算法
禁飞区预警算法是基于无人机飞行轨迹的曲线拟合和禁飞区域的位置关系判定实现的[8]。云数据中心实时接收无人机的状态信息,在云端先将无人机的地理坐标转换成高斯平面直角坐标,然后通过岭回归分析方法对无人机实时飞行轨迹的离散坐标点进行曲线拟合,判断该拟合轨迹曲线的切线延长线是否会与禁飞区域相交,根据实时位置信息判断其与禁飞区的最近距离是否超过标准距离来判定无人机是否有进入禁飞区的风险。一旦判定无人机的飞行轨迹存在进入禁飞区的风险,中心将使用短信推送服务实时向无人机操作人员发送短信预警信息。禁飞区预警算法流程如图6所示。
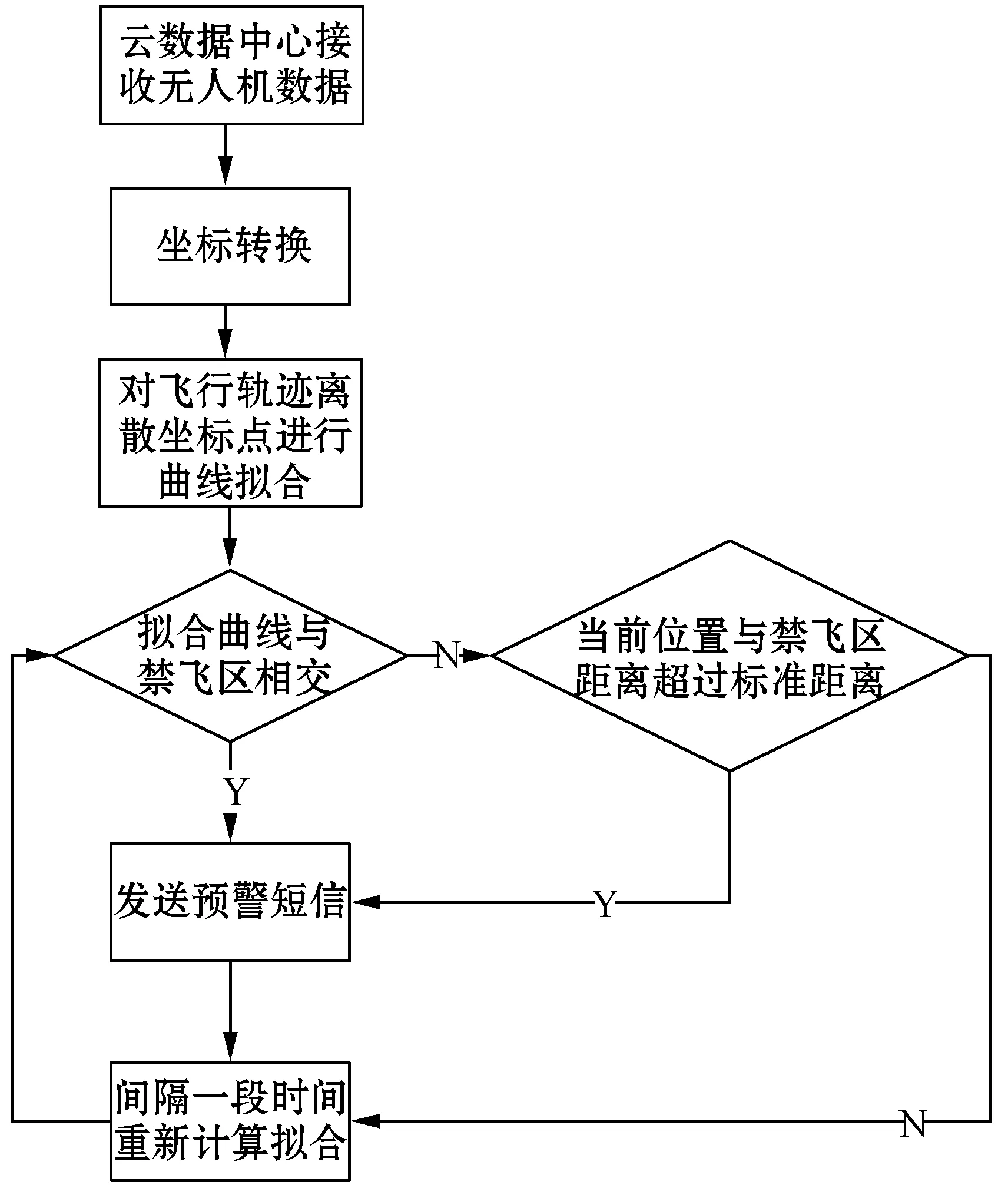
图6 禁飞区预警算法流程
由于无人机飞行轨迹既可以是线性的,也可以是非线性的,且无人机状态信息参数较多,多项式回归能够一定程度上拟合无人机一段时间内的飞行轨迹曲线[9]。但是在多项式回归的最高项次数较大时,模型容易出现过拟合,故采用正则化的方法,使用岭回归来防止过拟合的产生,更好地拟合无人机的飞行轨迹曲线。
岭回归是在多项式回归的代价函数的基础上添加对所有拟合参数的约束项,又称正则化项,是所有参数(不包括θ0)的平方和,即2范数,其相关定义如下:
无人机飞行轨迹拟合方程如下:
hθ(x)=θ0+θ1x+θ2x2+…+θnxn
(1)
代价函数如下:
(2)
由于岭回归代价函数仍为一个凸函数,可利用梯度下降法求得全局最优解,其正规方程为:
θ=(XTX+λI)-1(XTy)
(3)
与一般线性回归的正规方程相比,式(3)多了一项λI,其中I是单位矩阵,若XTX不可逆,则添加这一项后可保证该项可逆。使用梯度下降法求全局最优解的过程如下:
(4)
式中:λ为正则化项的参数,ω为不包括θ0的长度为n的θ向量,为计算方便添加θ0=0到ω,在梯度下降过程中,参数更新可以表示为:
θ=θ-α·∂θJ(θ)
(5)
式中:α为学习率。
根据云端实时接收的无人机的6个主要状态信息,调整设置无人机飞行轨迹的拟合方程,通过系统测试验证,当拟合方程为6阶时,能够较好地拟合无人机的飞行轨迹曲线。飞行轨迹曲线和禁飞区的位置关系判定示意如图7所示。
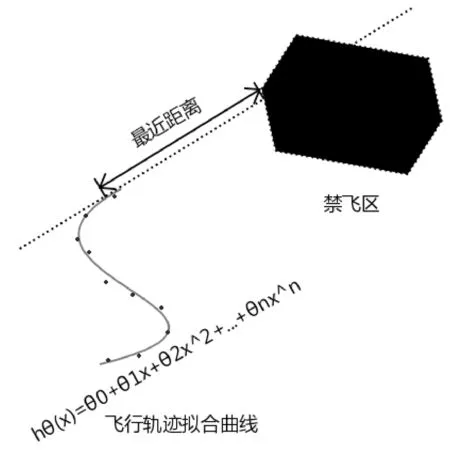
图7 飞行轨迹曲线和禁飞区的位置关系判定示意图
3.2 碰撞风险预警算法
碰撞风险预警算法是基于无人机的速度、航向、高度、经纬度等状态信息,通过云端实时计算预测两架无人机可能发生碰撞时的相对速度和相对运动的最短距离来判定实现的。关于无人机的安全飞行间隔,我国现行的《飞行间隔规定》[10]对飞行器的安全间隔有明确规定,为简化分析,该碰撞风险预警算法模型基于无人机为质点的球心构成的半径大小为R的三维球体构建。
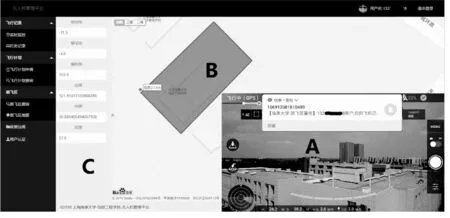
现有的解决防撞问题的典型几何方法是最小接近点法[11]和碰撞锥法[12]。考虑到系统实现,本文的碰撞风险预警算法主要基于最小接近点法实现。根据云端实时接收的无人机状态信息计算两架无人机到达相对运动的最短距离的瞬时速度Δv和两机的最短距离向量Δr,当系统检测到Δv>0且||Δr|| 图8 碰撞风险判定示意图 该算法具体实现如下: 以V1和V2表示两架无人机,两架无人机当前的位置为p1和p2、速度v1和v2,Δp为两机相对位置,Δv为两机相对速度,判断当Δv>0时,‖Δr‖ (6) 系统通过中国网建SMS短信平台提供的API接口实现短信推送服务,使用106短信通知网关,短信到达时间可通过后台管理员设置。 本系统实现了普通用户和管理员用户的权限分离,提供了如下服务: 1) 普通用户:提供用户认证、实时飞行监管、飞行历史记录、飞行计划申请、飞行计划查询、禁飞区查看、政策法规服务; 2) 管理员:提供系统所有在线无人机的实时监管、飞行计划查询、飞行计划审批、禁飞区查询、禁飞区报备服务; 3) 对外通信接口:提供政府监管接口 、空中管制接口、监管平台接入接口。 对本系统功能逐一进行测试。登录系统,操作无人机,在前端实时监管画面上查看无人机的状态信息。 在上海海事大学进行30架次无人机飞行测试,设置无人机理论触发预警的空间距离为10 m,通过实际飞行测试统计得出,在无人机相对速度几乎保持不变的情况下,无人机与禁飞区、无人机与无人机间的实际预警距离保持在9.2~10.4 m之间,误差波动范围小于1 m,在可接受范围内,图9是系统的实时预警性能测试结果。 图9 实时预警性能测试 对平台下无人机的实时定位精度测试得到,定位误差小于0.5 m;短信预警的接收响应时间在1 s上下波动0.5 s以内;云端处理的实时数据通信响应时间均在毫秒级(200 ms以内),具备良好的实时性;多架次接入系统进行飞行测试,系统工作稳定,性能良好。 以智能预警功能为例,图10中的A区域为APP上显示的以无人机为第一视角的实时拍摄画面; B区域是事先划定的禁飞区,系统通过预警算法监测到无人机即将进入禁飞区,云数据中心通过短信服务模块向无人机使用者实时发送预警短信,预警短信如A区域上方所示;C区域显示无人机的实时状态信息包括:无人机的位置、高度、经纬度、横滚角、俯仰角等信息。 图10 智能预警界面显示 测试结果表明,系统目标功能均已实现,并且具有较强的鲁棒性,系统人机交互良好,定位信息准确,通信稳定,有良好的实时性和可扩展性。 基于蜂窝移动网的无人机监管系统,实现了对线上无人机事前可预警、事后可追踪的设计目标,提供了飞行实时监管、历史轨迹回看、飞行计划申请、实时预 警等服务,利用无处不在的移动通信网络处理无处不在的无人机,实现全方位的监管。测试结果表明,系统功能基本实现,人机交互友好且稳定性良好,为我国实现对民用无人机的监管提供了一种可实施的方案。
4 系统测试

5 结 语
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25电子乐园·下旬刊(2022年5期)2022-05-13建材发展导向(2021年7期)2021-07-16读友·少年文学(清雅版)(2020年4期)2020-08-24读友·少年文学(清雅版)(2020年3期)2020-07-24航空模型(2017年7期)2017-08-15中国计算机报(2017年25期)2017-07-15