基于陀螺仪的智能骑行挂饰
2019-09-10 22:55刘世栋孙越葛杨郭嘉仪
科学导报·学术 2019年37期
刘世栋 孙越 葛杨 郭嘉仪

摘 要:在共享时代,单车出行成为主流。随之而来,非机动车安全问题也在不断增多。特别是在照明弱、雾霾天气等能见度低的条件下,单车事故更加频发。在这种背景下这款基于zigbee无线传输技术的智能骑行配件应运而生。它通过mpu6050做传感器来感知骑行转向,通过zigbee无线传输技术将数据传给控制器做处理,点亮led灯提醒后方车辆。具有结构简单,易于生产,价格便宜等特点。有指明单车转向,车距提醒,事故报警等功能。
一、背景
无论是在"国际范儿"和北上广或西方国家的道路,有在现场的非机动车道。然而,自行车和电动自行车的迅速发展一直伴随着难于管理,事故频发等问题。因此,非机动车的安全问题成为用户的关注越来越多关注的焦点。天津交管部门数据公布显示:在全市交通事故死亡人数,行人和非机动车使用更多的人员,占死亡,负责在事故总数的48.4%,占5.6%。另外一个易发生事故的重要原因是道路照明较差,灯光昏暗,缺乏車身反光设备。当视力不良条件下的非机动车出行的原因,很容易侧击车辆和非机动车发生事故的背后。此外,雾霾可能会让可见度降低,对道路上的行人、机动车辆和非机动车辆都有很大的安全隐患,十分危险。在夜间或严重雾霾天气昏暗,如果因为避障夏普车把弯曲的前车,车是很难理解汽车前进队伍的前面,最有可能是由于时间冲突与车辆在没有制动前面,造成交通事故。并且,除了以上路况不明的情况,日常骑行过程中也经常会出现非机动车辆由于某种原因突然转向而引发的交通事故,由此可见非机动车辆使用转向提示以及其他智能安全设备功能的重要性。
目前市场上已经出现的相关智能骑行配件,比如Varia智能骑行车灯,骑车人背背佳挂件智能遥控方向安全指示灯等产品,往往存在过于强调科技元素的使用,"形式重于实质",定价过高或者功能过于片面,技术含量不够的问题,缺乏实用性,无法普及开来,使群众受益。本着安全智能的理念,为了解决非机动车辆出行转向无法明示易导致交通事故等安全方面的问题,本产品应运而生。
二、主要功能
本产品采用ZigBee无线传输模块实现无线通信,在平常可以当做一个美观的背包挂饰。本产品在结构上可以分成两部分:识别模块和控制模块。识别模块由龙头方盒、MPU6050六轴传感器、ZigBee模块、前照探测灯四部分组成。用户可轻击从车把安装和拆卸的非机动立方体,处理操作是非常容易的,通过六轴传感器模块的ZigBee角信息提供给控制模块。ZigBee模块的控制模块,LED屏幕,蜂鸣器,最小系统板,GPS模块,GSM模块一体化,OV7670相机模块。ZigBee模块是一款非常成熟的近距离数据传输传感器,它将收集到的数据传给最小系统板,由系统板进行姿态解算,并控制LED显示灯以及语音播报模块进行相关的提示。
三、主要技术
ZigBee无线传输模块ZigBee是一种无线连接,具有低功耗、成本低、时延短等特点。
mpu6050感测方向MPU-6000(6050)是一个集成的6轴运动处理部件,相对于多组分实施例中,不使用陀螺仪和加速度计轴线的组合差的问题,降低了包装空间。数字矩阵输出轴旋转轴线或 四元数(四元),欧拉角格式(EulerAngleforma)的数据融合算法。产品通过求解在6050,滚动角和俯仰角获得的算法计算偏航角来解决。
我们知道,欧拉角表达被旋转的最简单的方法,形成一个三维向量,表示所述对象物的旋转角度大约三个坐标轴(X,Y,欧拉角表达被旋转的最简单的方法,形成一个三维向量,表示所述对象物的旋转角度大约三个坐标轴(X,Y,Z轴)的值。以x,y,z轴表示偏航、横滚和俯仰非常简单。因此我们需要编程将6050得到的四元数矩阵转化成欧拉角矩阵。可以指固定的三轴世界坐标系轴,旋转轴也可以指物体坐标系。旋转的三个轴的顺序不同,会导致不同的结果。
四元数旋转欧拉角如下:
为了验证该算法,使用六个度通过在MATLAB仿真模型提供的一个封装好的模拟器,可以给定的扭矩和力输出的三个欧洲拉三轴角度和角加速度,这样可以非常好的模拟传感器的状态。为使达到准确的模拟结果,该模型通过调整初始输入条件设定为固定步模式中,0.0S,即,50赫兹的模拟取样频率,的步骤中,欧拉角的变化可以在整个可实现角度范围,不会出现非常短的时间,并且根据一个大的跳跃。比较的实际情况和便利性,输出调整六个自由度模型的一个标准的域的欧拉角制成。
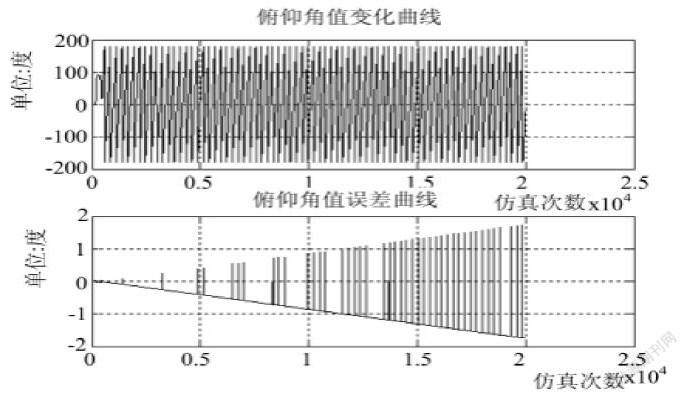
因为修正了定义域,某些点出现了强烈的变化(这些点实际上是连续的,比如说航向角低于零的点使用定义域修正后变为大于360的值,而大于360的值变成接近零的值即可),这样就可以模拟大机动飞行条件下的飞行姿态。通过四元数微分方程更新求解过程,采用三阶泰勒展开法这样精确度较高,得到三轴欧拉角的误差曲线如图。三轴欧拉角的误差在仿真过程中的最大偏差值为:[0.1422,0.6948,0.7037].为了进一步验证算法对于计算的稳定性以及俯仰角变化的跟踪敏感性,设计了滚转角和偏航角均为0度,只在俯仰角大范围连续变化下的算法仿真,下图为400秒(20000次)下计算值与理论值之间的误差曲线以及俯仰角值的变化曲线。可以看出,一些连续的急剧变化时,误差值始终是一个很小的范围内,有良好的跟踪性能之内。
猜你喜欢
小雪花·成长指南(2020年2期)2020-10-12
阅读与作文(英语初中版)(2019年8期)2019-08-27
小猕猴智力画刊(2019年3期)2019-04-19
环球时报(2017-12-13)2017-12-13
小猕猴智力画刊(2017年6期)2017-07-03
中学生数理化·高一版(2017年1期)2017-04-25
中学生数理化·高一版(2017年1期)2017-04-25
中学生数理化·高一版(2017年1期)2017-04-25
汽车之友(2016年14期)2016-07-14
中国经济信息(2015年21期)2015-11-12