
基于ADAS 实验平台的自动泊车系统研究*
2019-09-11 03:01张春洲石晶
汽车实用技术 2019年16期
张春洲,石晶
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001)
前言
在当今高级辅助驾驶系统(ADAS)的多元化发展趋势下,对高级辅助驾驶的研究已经不仅限于各大汽车制造企业及汽车设计公司,各高校已经逐渐开始对高级辅助驾驶进行更为深入的研究并进行相关模拟或实车实验。自动泊车系统(APS)作为高级辅助系统下的一个重要分支,起着至关重要的作用。在驾驶员日常泊车时,由于泊车过程中驾驶员较大概率会产生紧张感,增大泊车难度,容易造成车辆碰撞,因此自动泊车系统可以给驾驶员提供很大便利。
1 ADAS 实验平台
ADAS 实验平台由中华V3 驾驶模拟系统、主控PC、RT系统、快速原型控制器及管理PC 组成。
图1 为ADAS 实验仿真平台实物图,左侧是驾驶模拟器,中间是NI 设备柜,右侧是主控PC 等操作平台。实验平台主要用于ADAS 控制策略研究、控制算法验证、雷达视觉信号分析及其数据融合等的研究。
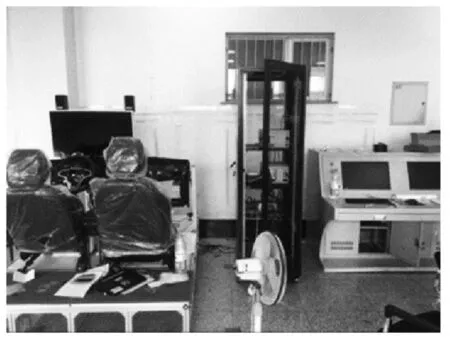
图1 ADAS 实验仿真平台实物
2 自动泊车系统
自动泊车是通过探测车辆周围环境信息来找到合适的泊车位,从而控制车辆的转向和速度,使得车辆能够自主驶入泊车位[1]。确保每一个驾驶员安全无碰撞地进行泊车,已日益成为当今汽车技术的一个热门研究方向[2]。自动垂直泊车是通过泊车过程中对方向盘转角的控制来控制车身姿态,使车身在泊车结束时与泊车开始时的车身近似呈90°。如图2所示,自动泊车主要分为三类,平行泊车、垂直泊车、斜线式泊车,现在对平行泊车和垂直泊车的研究居多。
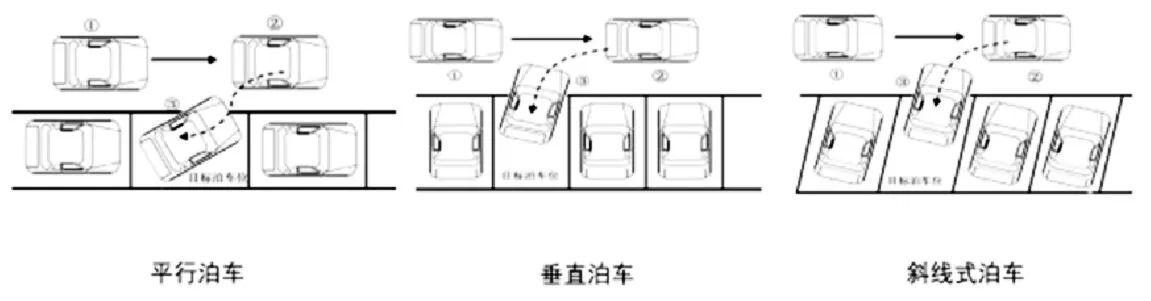
图2 自动泊车分类图
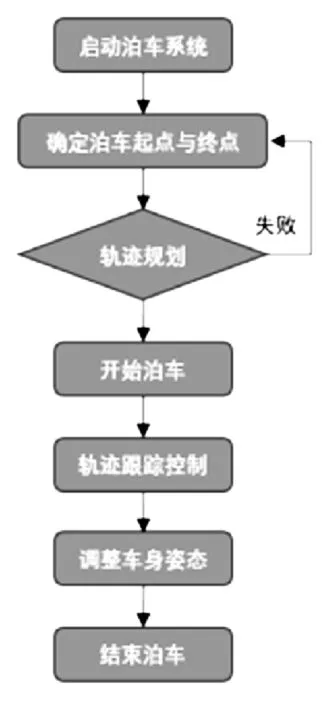
图3 自动泊车系统流程图
如图3 所示,自动泊车系统流程主要分为三步:探寻雷达寻找合适的车位;车位合适,开始泊车,倒入车位;停车入位,调整车身姿态。
3 软件联合仿真
ADAS 实验平台采用CarSim2018 软件和MATLAB/Simulink 的联合仿真。
CarSim 是一种专业的车辆动力学仿真软件,能准确模拟车辆对驾驶员操作行为、空气动力学以及路面激励的响应。在车辆操纵稳定性、平顺性、燃料经济性、动力性等领域有广泛应用[3]。
Simulink 是MATLAB 中的一种可视化仿真工具,是一种基于MATLAB 的框图设计环境,是实现动态系统建模、仿真和分析的一个软件包,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中[4]。
在Carsim 与Simulink 联合仿真时,首先需要定义Carsim与Simulink 的接口,Carsim 的输入接口控制自动垂直泊车车辆的驱动与转向,所以定义节气门开度、制动压力以及方向盘转角作为Carsim 的输入接口,自动垂直泊车需要从Carsim中获取车辆信息以及传感器探测的信息,那么Carsim 的输出接口有本车车速信息、从雷达传感器获取与两个目标车的相对距离信号。如图4 为自动泊车实验过程。

图4 自动泊车实验过程
4 在环仿真
将设计好的控制策略及路径算法加载到实时系统中,将执行机构的转向控制算法加载至快速原型控制器中。
在实时系统中,CarSim 设置相应的模拟场景和模拟仿真车辆的激光雷达。雷达实时监测车位情况,将车辆与车位的各项信息传递给快速原型控制器,快速原型控制器经过一系列的控制策略和控制算法传递给驾驶模拟器的执行机构,执行机构控制驾驶模拟器完成在环仿真。
5 结论
本文根据将自动泊车系统控制策略及算法通过Simulink建模并加载到ADAS 实验平台上,运用Carsim 作为汽车系统动力学软件,可实现平稳、顺滑的良好泊车,可以应用到不同泊车位、不同车型的自动泊车中,并提供了虚拟实车验证试验平台,为后续能够再实车实现 ADAS 的控制策略仿真打下基础。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
小猕猴智力画刊(2019年8期)2019-09-12
中国测试(2018年9期)2018-05-14
现代家长(2018年11期)2018-01-05
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
科技资讯(2012年28期)2012-07-09
