基于STM32的马克1号飞行器的研究与设计
2019-10-07 14:59郭恒吉赵亮黄余双杨乐虎
新一代 2019年13期
关键词:飞行器
郭恒吉 赵亮 黄余双 杨乐虎
摘 要:四旋翼飞行器的飞行技术长时间以来都是研究的重点方向,关于这方面的课题也越来越多,受到很多无人机爱好者的青睐和关注。飞行器体积很小,重量很轻,而且耗能也很低,可应用与各个方面,如洒农药、侦察、执行高空飞行任务以及搭载重物等等。本文简要介绍了本项目的研究对象“马克1号”的基本结构和本项目的主要研究内容,对马克1号四旋翼飞行器的发展意义做出了分析。
关键词:STM32;马克1号;飞行器
飞行器近几年发展得很火热,四旋翼飞行器也是很多飞行器爱好者的心头爱,越来越多的课题专注于飞机建模和模拟的有效性,以验证其控制策略是否有效可行。通过研究马克1号四旋翼飞行器可以了解飞行器的姿态调整、互补滤波、PI、PD控制并用马克1号实现航拍,对地面的监控等。
一、马克1号基本结构
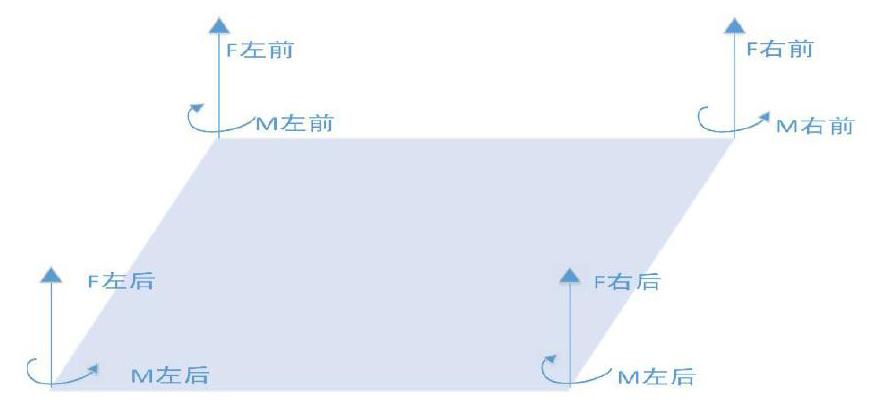
下图是我们制作的四轴飞行器的抽象图;
不难看出,将四个螺旋桨的转动速度改变就可以控制四轴飞行器的动作,将四个螺旋桨的力矩和力改变就可以控制四周飞行器的姿态。
下面我介绍下四轴飞行器的基本组成部分,四轴飞行器主要由以下几部分组成:
第一部分:机翼。机翼由电机和螺旋桨组成,电机和螺旋桨分别有四个,除了二者外还包含有些许固定器件。电机方面,分别有两种类型(有刷、无刷)。螺旋桨有两对,包括正螺旋桨和反螺旋桨。正螺旋桨与反螺旋桨的旋转方向不同,前者是顺时针,后者是逆时针。
第二部分,电机。四旋翼电机为空心杯,桨叶46mm,电池用的小型锂电池,对角电机轴距92mm*92mm。无刷直流电机是是四旋翼飞行器主要的、常用的电机类型。其优点有:第一,结构简单,可以方便安装与拆卸;第二,容易控制,更好的保障飞行器的安全。
第三部分,飞控板(飞行控制器)。飞控板不仅可以保持四轴飞行器的平衡,还可以改变左右两边的力量大小,调整四轴飞行器的飞行状态,假使失去飞控板,四轴飞行器就会失去平衡,冲撞翻滚。
第四部分,机架。机架的轴长短以保证四个螺旋桨的乱流不互相影响为准,同时还要考虑飞控板安装的位置。
除上面提到的这些外,还有遥控接收器、电子调速器等,都是四轴飞行器重要的组成部分。
二、马克1号项目研究内容
在硬件设计方面,包括以下几个结构:
第一部分,电源。电源供给包括三部分。第一部分为接收机提供供给,4.2V以上的电压是接收机对电源供給的要求;第二部分是为电调供电从而驱动电机,电调内部设有BEC模块,锂电池功率大,可以作为不错的选择;第三部分是为开发板供电,这一部分可以用稳压模块来供电,因为稳压模块更加的稳定。第二部分,惯性测量传感器。分为角速度传感器、加速度传感器和三轴地磁传感器。第三部分,遥控接收器。通过将信号编码再解码并处理完成工作。第四部分,电机驱动模块。
在软件设计方面,包括以下几个结构:
第一部分,上位机。上位机可以显示各种数据,如电量、姿态等,还可以校正传感器,是软件设计中很重要的组成部分。第二部分,下位机,决定飞行器的安全与稳定,是MCU里面的程序。
在项目中,第一步我们先要将四驱飞行器的动力学模型建立起来。PID是实用性很强、灵活性强、应用领域很广泛的一种控制器,基于PID算法,我们可以先设计出飞行器的控制系统,即PID控制,这样参数比较容易整定。其次,将Backstepping(反步法)应用于控制系统和自适应控制系统。最后进行对模块的仿真,可以知道哪种控制系统更加占优势。
三、项目研究意义
四旋翼飞行器在实际生活中有很多用处,生产生活的各个方面都对其有很大的需求,不仅能够大大降低作业成本,而且可以有力保障人员的安全。现在的飞行器在商业,农业,军事,消防,工业方面的前景是非常广阔的,在军事方面,飞行器可以执行侦察与营救任务,达到一系列军事目的,比如在四旋翼飞行器携带军事武器等等,飞行器的研究意义重大。在地质研究方面,飞行器可以起到收集科学的数据,对地质和林业进行勘探;影视制作方面,可以进行航拍,来更好的优化摄影效果;农业生产方面,可以用来进行高空洒农药,监控农作物生长速度,从而及时进行病虫害防治,进行田地的勘测,而装有太阳能电池板的四旋翼飞行器可以进行种子的播撒。
它的主要优点包括:很好的保证人员安全,同时,人员也很容易上手操作,操控性很强。旋翼式飞行器在固定翼飞行器的条件上取得了很大的进步。较固定翼飞行器相比,旋翼式飞行器在起飞和降落时,所占的空间小。同时不仅可以很好的灵活的躲避障碍物,而且旋翼式飞行器的能够很好地保持姿态能力。
四、结语
科技在不断地发展,新的控制理论不断出现,也在不断的完善。四旋翼飞行器的发展趋势也会越来越好,研究者也将不断扩大四旋翼飞行器的应用领域,向着智能化不断发展,小型高效的新能源也会应用其中,从而能够更好地造福社会。
参考文献:
[1]何瑜. 四轴飞行器控制系统设计及其姿态解算和控制算法研究[D].电子科技大学,2015.
[2]廖懿华,张铁民,廖贻泳. 基于模糊-比例积分偏差修正的多旋翼飞行器姿态测算系统[J]. 农业工程学报,2014,30(20):19-27.
[3]邱日鹏. 基于四旋翼飞行器的大气环境监测系统研究与设计[D].南昌航空大学,2018.
猜你喜欢
红领巾·成长(2022年6期)2022-07-23
凤凰动漫(军事大王)(2022年1期)2022-04-19
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
电子制作(2018年2期)2018-04-18
小朋友·快乐手工(2015年5期)2015-06-06