喷杆运动与喷雾沉积分布变异系数关系试验研究
2019-12-22 02:31崔龙飞薛新宇乐飞翔秦维彩周晴晴
农机化研究 2019年6期
崔龙飞,薛新宇,乐飞翔,秦维彩,周晴晴
(农业部南京农业机械化研究所,南京 210014)
0 引言
喷雾机被广泛用于作物病虫草害的防治,可使农作物产量增大[1-3]。当喷雾机在田间作业时,喷杆水平面和竖直面内的运动导致重喷或者漏喷[4]。喷雾机在起伏不平的田间行驶时,影响喷雾分布的有害运动主要包括喷杆的滚转、横摆和振荡,MahalingaIyer和 Wills等最早开始了喷雾机的喷杆晃动对喷雾分布形态的影响研究[5-10]。喷杆喷雾分布仿真模型揭示:喷杆水平运动导致喷雾分布变异系数在20%~600%之间变化,喷杆垂向振动导致喷雾分布变异系数在0%~1 000%之间变化[11-14]。
许多学者开始研究使用悬架来衰减由地面传递到喷杆上的振动,有两种悬架控制技术:被动悬架和主动悬架。被动悬架主要通过使用弹簧、阻尼来保持系统刚度,减小振动强度[15-17],能够较好地衰减来自路面不平整产生的高频振动,主动悬架能够使喷杆跟踪低频的地面起伏变化[18-19],因此许多学者开始在理论和试验两方面研究主动喷杆悬架系统[20-21]。迄今为止,虽然喷杆的不规律运动被认为较大地限制了喷雾均匀性,但悬架的应用仍然较少,传统主动控制方法仅在喷雾机低速工作时能满足性能要求[22]。悬架设计过程中需要考虑喷何种运动范围内的喷雾均匀性是满足病虫害防治要求的,因此开展喷杆运动对喷雾沉积分布的影响规律研究对喷杆悬架的设计具有重要的指导意义。
本文在喷杆末梢安装超声波测距传感器和加速度传感器,测量喷杆的运动和垂向振动加速度。在田间布置水敏纸,测量沿着喷杆方向和行驶方向的雾滴分布均匀性变异系数。通过GPS辅助惯性测量系统获取喷雾机底盘的运动姿态,通过对试验数据分析,探明车体晃动、喷杆运动、喷雾分布变异系数之间的关系。
1 喷杆式喷雾机
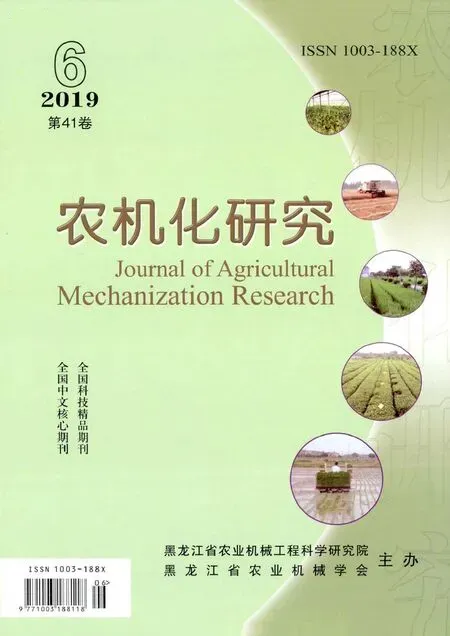
试验喷雾机为天鹅集团埃森SWAN3WP-500喷杆式喷雾机,如图1所示。喷杆臂展长9.5m,外侧喷头增加喷幅至12m;喷杆通过平行四边形机构与车架相连,无减振悬架,通过双作用油缸实现喷杆整体离地高度在0.46~1.39m调节;喷杆上等间距0.47m安装21个陶瓷锥形喷嘴,喷杆末梢装有侧喷嘴4个,药箱容量500L,发动力功率17.1kW,作业速度4km/h;喷杆上使用的喷嘴为ITALY MAODEN系列80°双联陶瓷锥形喷嘴,最大工作压力2MPa,试验时工作压力2MPa,喷嘴流量0.7L/min。
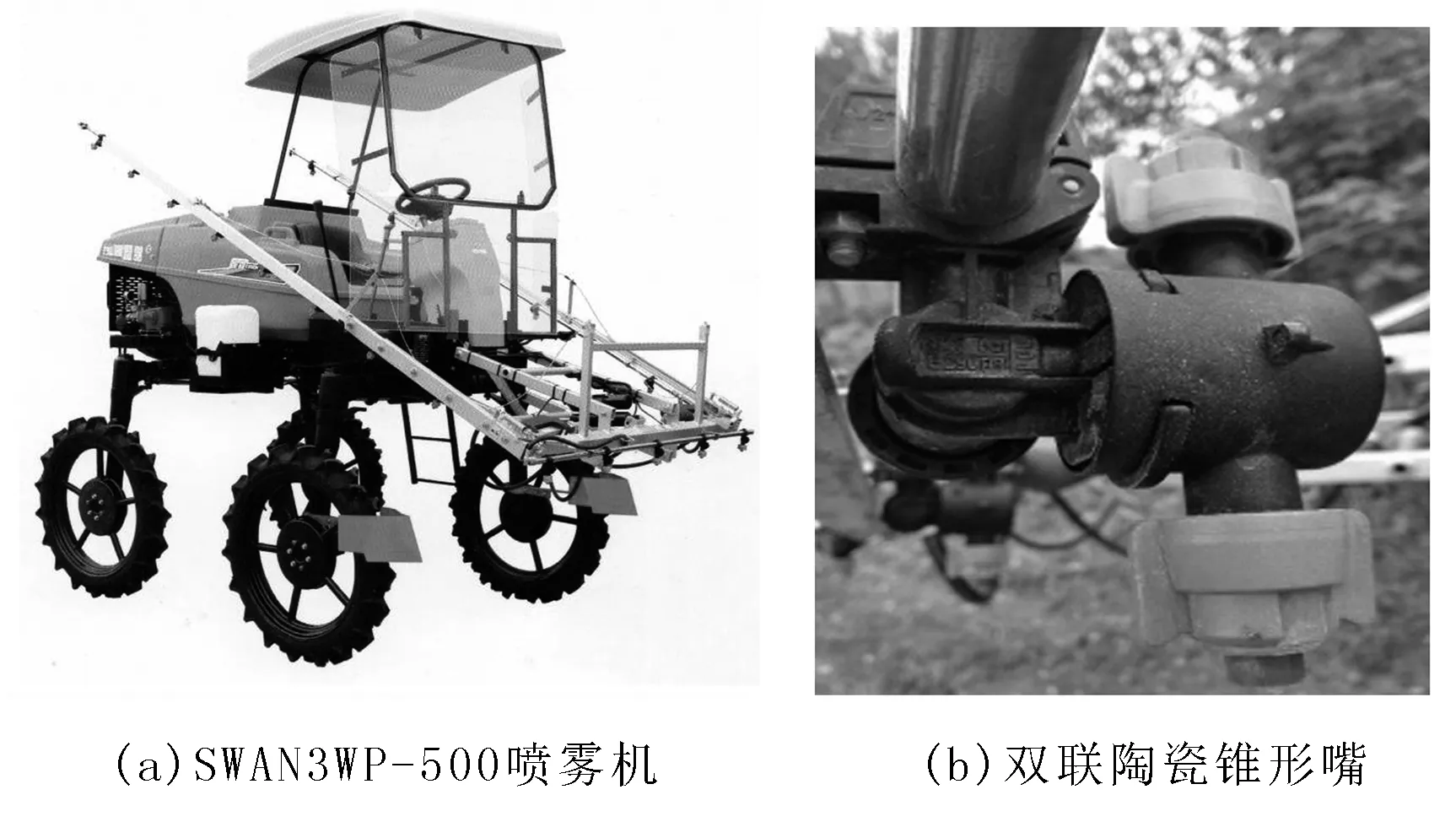
图1 试验喷雾机Fig.1 Test sprayer
2 材料与方法
2.1 喷杆运动测量
由于喷杆采用铝合金材质,在田间作业过程中,地面激励导致喷杆发生侧倾和弹性变形等无规律运动,因此喷杆的运动使用超声波距离传感器及加速度传感器共同测量。如图2(a)所示:喷臂上加速度传感器的安装在喷臂中间位置,该传感器为IEPE压电式加速度传感器(东华测试,型号105E,轴向灵敏度1 006mV/g,量程±5g,工作温度 -20℃~80℃)。如图2(b)所示:超声波感器安装在末梢上,超声波距离传感器型号为U-GAGE U45Q( Banner,美国),响应时间可调节范围为 40~1 280ms,供电电压15~24V,输出模拟电压0~10V,量程0.25~3.0m。动态采集分析仪器型号东华测试DH5902,共8通道,每通道具有独立的16位 A/D, 独立的DSP,并行同步采样;所有通道连续同步采样,每通道10到100k(Hz)分档切换,喷雾机行驶速度4km/h,试验采样频率设置为1 000Hz。滤波的范围根据快速傅里叶变换(FFT)和功率谱曲线的能量分布,在采用分析软件设置带通滤波器的频率范围0.1~15Hz,数据采用方式为离线采集方式。

图2 传感器安装Fig.2 Installation position of sensors
使用双GPS辅助的惯性测量系统SBG Ellipse-D-G4A2B1(SBG System ,法国)进行喷雾机车身运动姿态信号采集,内置加速度计测量范围±8g,陀螺仪角速度测量范围±450°/s,零偏稳定性±0.2°/s,姿态测量误差横滚0.1°、俯仰0.1°、偏航角0.2°,输出频率设置为20Hz。惯性测量系统的数据通过DTK 2617C无线串口模块发送至远程接收模块,该数据传输模块使用ZigBee协议,波特率设为115 200MBPS,可以实现1.5km以内的数据无线传输。如图3所示:将其为安装于喷雾机底板上,在采集分析软件SbgCenter 中设置喷雾机中心到测量单元的相对位置及GPS天线到测量单元的相对位置。

图3 GPS辅助的惯性测量系统Fig.3 GPS assisted inertial measurement system
试验过程中,由于试验人员跟随喷雾机进行数据采样存在人身安全问题,DH5902数据采集器与上位机通过点对点无线网络通讯,SBG Ellipse-D惯性测试单元与上位机通过DTK2617C无线串口模块通讯,将笔记本电脑连接的无线模块设置为网络主节点,与SBG Ellipse-D惯性测试单元连接的无线模块设置为从节点,并在软件SBG Center中实时显示并记录喷雾机的运动姿态等参数。
2.2 喷雾沉积量的测量
喷雾的沉积分布通过水敏纸来测量,水敏纸通过杆子和夹子布置在田间小麦的上层,进行A、B、C这3组重复试验。如图4所示:每组布置7片水敏纸,水敏纸编号1~7,水敏纸1~5沿喷杆方向从左到右布置,用于测量横向的喷雾均匀性,水敏纸4、6、7位于前进方向,用于测量沿着行驶方向的喷雾均匀性。匀速通过试验区,每次喷雾试验后,等水敏纸上的雾滴晾干后,用镊子或带防水手套收取,并做好标记,放入自封袋,带回实验室进行分析。
3 试验与结果分析
本研究于2017年4月27日上午10点在江苏省宿迁市泗洪县洪泽湖农场进行小麦试验,株高90~100cm。为了降低叶面积指数对雾滴覆盖率的影响,在试验之前,选取株高和长势相对均匀、面积约为45m×100m的地块作为试验处理区。试验用Kestrel4500便携式气象站(美国Nielsen-Kellerman公司)测量并记录试验过程中的温度、湿度和风速,温度最高值为32.8℃,最低值为20.5℃,平均为27.56℃;湿度最高值为83.2%,最低值为47.6%,平均为65.2%;风速最高值为3.2m/s,最低值为0 m/s,平均为0.77 m/s。试验现场如图5所示,经纬度如图6所示。

图4 试验区内水敏纸的布置方案Fig.4 Layout of water sensitive papers in the test area

图5 试验现场Fig.5 Test site
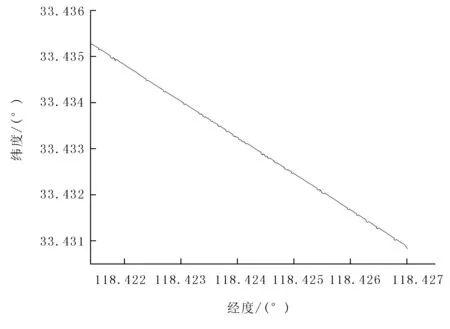
图6 喷雾机行驶轨迹Fig.6 Driving trajectory of the sprayer
田间试验结束后,将采集雾滴分布的水敏纸带回实验室扫描处理,A组试验沿喷杆方向布置的5张水敏纸沿喷雾机行驶方向布置的3张水敏纸,如图7所示。
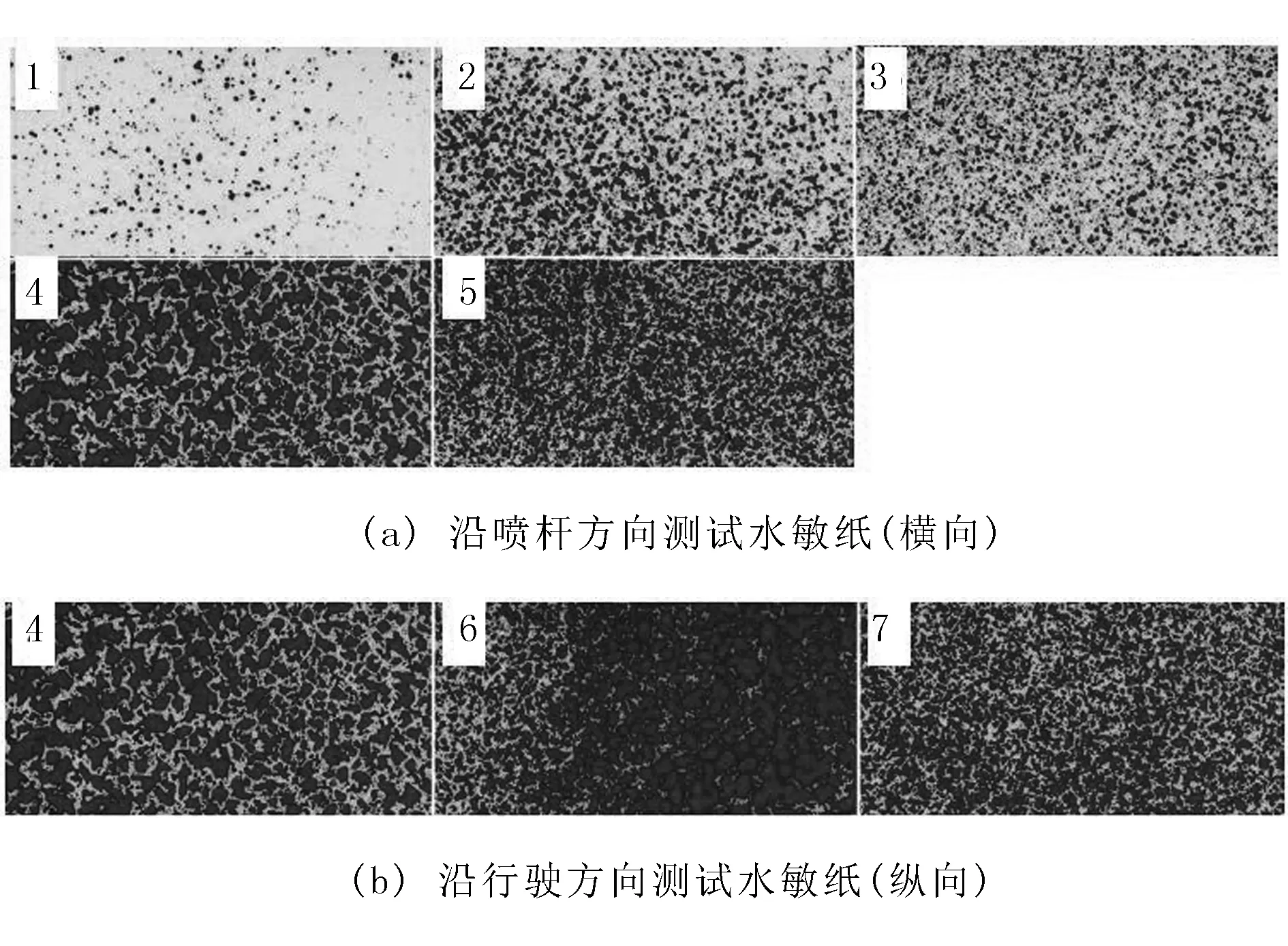
图7 雾滴覆盖率测试Fig.7 Test of droplets coverage
雾滴覆盖率可以通过图像中分析区域雾滴的像素个数的分析区域之比求得,其计算公式为
(1)
其中,M、N分别为分析区域的宽度和高度;f(i,j)为图像分析区域中像素相对坐标为(i,j)处的像素灰度值标志。若像素为黑色,则f(i,j)=1;否则,f(i,j)=0。
针对A、B、C这3组试验的水敏纸,通过图像分析法计算雾滴覆盖率,沿喷杆方向的雾滴分布覆盖率及覆盖率的变异系数如表1所示。沿喷雾机行驶方向的雾滴分布覆盖率及覆盖率变异系数如表2所示。从表1和表2可以看出:沿喷杆方向的雾滴覆盖率变异系数大于行驶方向的雾滴覆盖率变异系数。这说明,喷杆倾斜导致的喷嘴距离作物高度变化,对喷雾均匀性的影响更大。

表1 沿喷杆方向的雾滴覆盖率及变异系数Table 1 Droplet coverage and coefficient of variation along the direction of the boom

表2 沿喷雾机行驶方向的雾滴覆盖率及变异系数Table 2 Droplet coverage and coefficient of variation along the driving direction of the sprayer
试验过程中,惯性测量系统Ellipse-D测得喷雾机前进方向的前进方向加速度均方根值1.002m/s2,最大值为3.25m/s2,如图8(a)所示;垂直方向加速度均方根值2.36m/s2,最大值为11.29m/s2,如图8(b)所示。垂向振动导致喷杆发生垂直面内的往复震荡,影响的是沿喷杆方向的喷雾分布变异系数;前进方向的速度变化导致喷杆水平面内的往复震荡,影响的是喷雾机前进方向的喷雾分布变异系数。由加速度曲线可以看出:喷雾机垂向振动加速度比前进方向的加速度大,导致喷杆垂直面内的振动较大,是沿喷杆方向的雾滴覆盖率变异系数较大的原因之一。
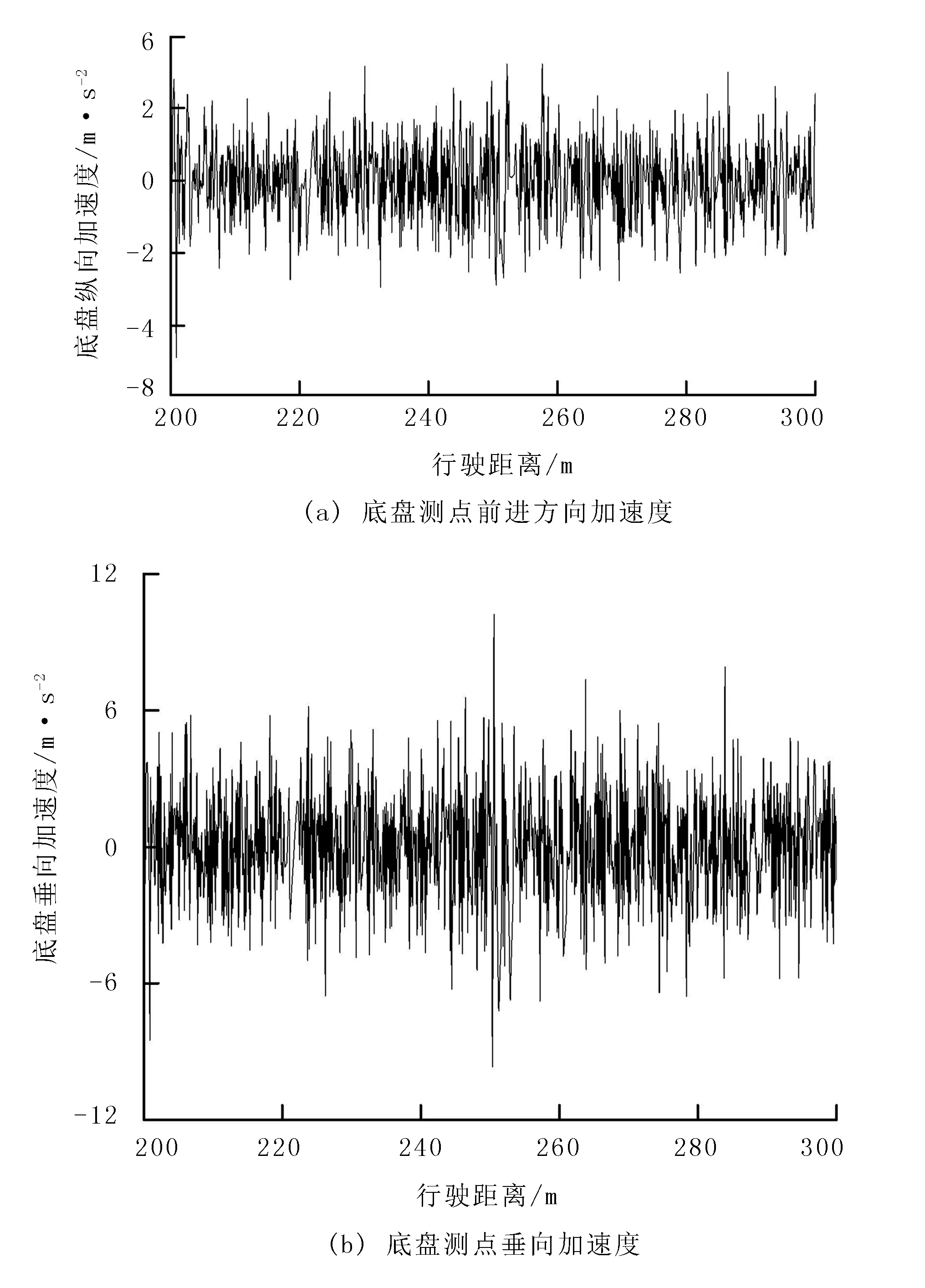
图8 底盘振动加速度Fig.8 Vibration acceleration of chassis
喷雾机沿着前进方向的滚转角变化曲线如图9所示。其中,滚转角均方根1.146°,加速度最大绝对值4.51°。由于喷杆与车架之间采用的刚性连接,车体的滚转运动直接传递到喷杆上,且地势不是绝对水平,测得的车体侧倾角存在趋势项。图10为左右喷臂的振动加速度曲线,其左侧喷臂振动加速度均方根3.586m/s2,右侧喷臂振动加速度均方根2.89m/s2。

图9 底盘滚转角时间历程曲线
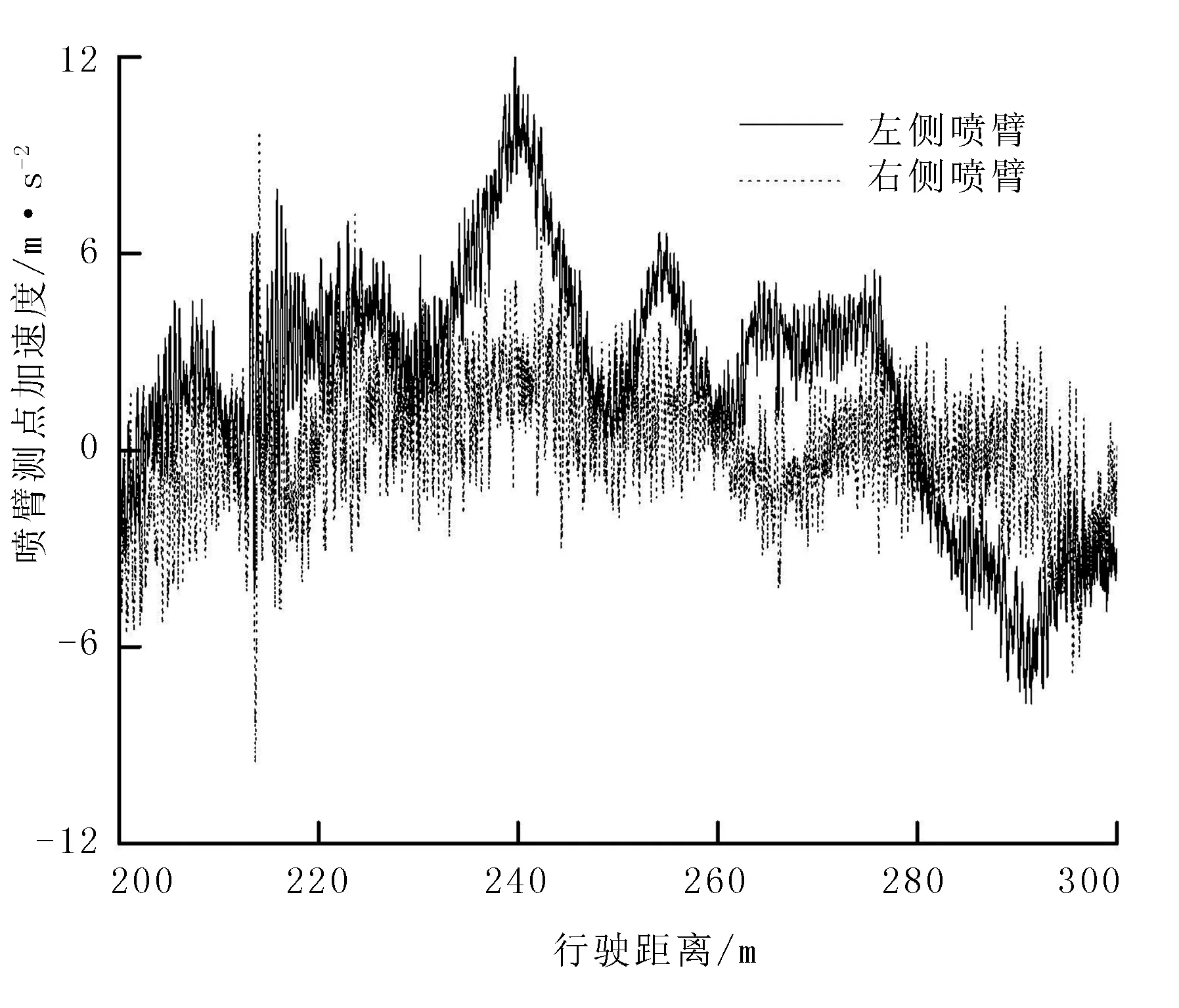
图10 喷臂测点垂向振动加速度Fig.10 Vertical vibration acceleration of the measuring point of the boom arm
测试系统得到的喷杆末梢距离作物高度数据经过低通滤波和平滑处理,如图11所示。喷杆两侧高度差最大值为421.713 0mm,A、B、C这3组水敏纸布置在220m、240m、260m位置附近。由图11可以看出:220m位置处喷杆高度差374mm,对应的横向喷雾分布变异系数为80.38%;240m位置处喷杆高度差118mm,对应的横向喷雾分布变异系数为65.48%。由此可知:喷杆倾斜导致的喷嘴高度不一,对喷雾分布影响较大,喷臂两侧高度差越大,雾滴分布的变异系数越大。
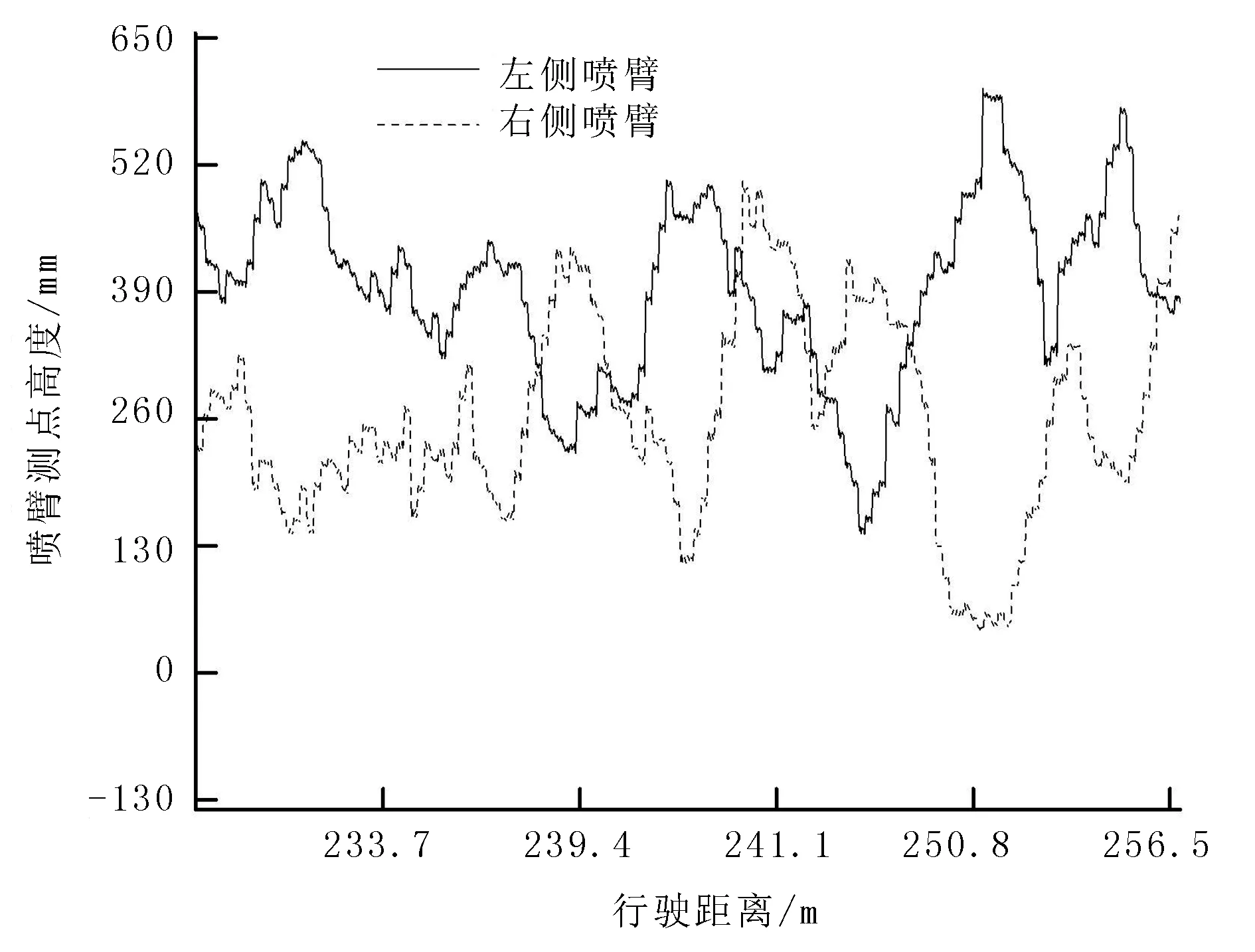
图11 喷杆末梢距离作物高度变化曲线Fig.11 The height of the end of the boom from the crop
4 结论
喷雾机在起伏不平的田间行驶时,地面起伏会导致喷杆的发生不规律运动,通过在喷杆末梢安装超声波测距传感器和加速度传感器,测量喷杆的滚转运动及垂向振动加速度。同时,在田间布置水敏纸,测量沿着喷杆方向和行驶方向的雾滴分布均匀性变异系数。使用双GPS辅助的惯性测量系统获取喷雾机底盘的运动姿态和运动轨迹,将测得的喷杆运动与水敏纸测得的沉积分布量对应起来,通过试验数据可知:喷雾机垂向振动加速度比前进方向的加速度大,喷杆垂直面内的振动较大,是沿喷杆方向的雾滴覆盖率变异系数较大的原因之一。进一步分析可知:A组喷雾覆盖率均匀性采样位置处喷杆高度差较大,对应的横向喷雾分布变异系数为80.38%;B组位置处喷杆高度差较小,对应的横向喷雾分布变异系数为65.48%;喷臂两侧高度差越大,雾滴分布的变异系数越大。喷杆方向的雾滴覆盖率变异系数大于行驶方向的雾滴覆盖率变异系数,说明喷杆倾斜导致的喷嘴距离作物高度变化,对喷雾均匀性的影响更大。
猜你喜欢
农业开发与装备(2022年7期)2023-01-05
农业装备与车辆工程(2022年5期)2022-10-31
今日农业(2022年15期)2022-09-20
中国农机化学报(2022年8期)2022-08-12
农业机械学报(2022年2期)2022-03-14
今日农业(2021年21期)2021-11-26
林业机械与木工设备(2021年2期)2021-03-11
落叶果树(2020年5期)2020-10-22
农机使用与维修(2018年3期)2018-03-23
价值工程(2018年3期)2018-01-23