采摘机器人动态路径规划系统研究—基于人工势场法
2019-12-22 02:31吴东林张玉华
农机化研究 2019年6期
吴东林,张玉华
(漯河食品职业学院,河南 漯河 462300)
0 引言
随着自动化、计算机和电子技术的发展,人类已从刀耕火种过渡到机械化作业,各国都在引入各类农业机器人。我国水果种植面积大,人工采摘水果工作量巨大,研发出能实现自动控制的各类水果采摘机器人已是现代化农业的迫切需求。本文基于人工势场法设计了一套采摘机器人动态路径规划系统,对采摘机器人动态路径规划具有一定的参考意义。
1 采摘机器人作业环境及障碍物建模
1.1 采摘机器人作业环境建模
在采摘机器人作业环境建模过程中,合适的环境表示方法能够有效地建立路径规划和路径搜索算法,从而制定出时间短、路程短的最优路径。对已知的作业环境建立模型时,采用比较多的方法是栅格建模法。该方法是采用栅格的极坐标和直角坐标的变换关系,将作业环境区域分割成单位大小的栅格。只要栅格内存在障碍物或其他物体,则标记该区域为障碍物栅格。该方法可以表达多种不规则障碍物,具有实现过程简单及计算时间短等优点。
本文采用栅格法建立采摘机器人作业环境模型,具体流程为:①建立如图1所示的直角坐标系,无需划分栅格,而是以障碍物顶点(见图2)确定障碍物的位置;②在采摘机器人移动过程中,实时判断是否会从各个障碍物的顶点间经过,若存在这样的现象,则判定机器人将和障碍物发生碰撞行为;③为了更好地实现路径规划过程,本文将每个障碍物的顶尖之间连线,路径规划时不允许采摘机器人规划出的路径穿过连线,从而保证采摘机器人和障碍物不会发生碰撞行为。

图1 建立作业环境模型Fig.1 Setting up a working environment model

图2 障碍物简易位置图Fig.2 The simple position diagram of obstacles
采用该方法表示障碍物,会加大采摘机器人路径规划所需的时间,也加大了其运算工作量,对硬件要求较高。因此,本文采用一圆形区域表示各种不规则的障碍物,方便采摘机器人进行处理。环境模型中障碍物表示如图3所示。
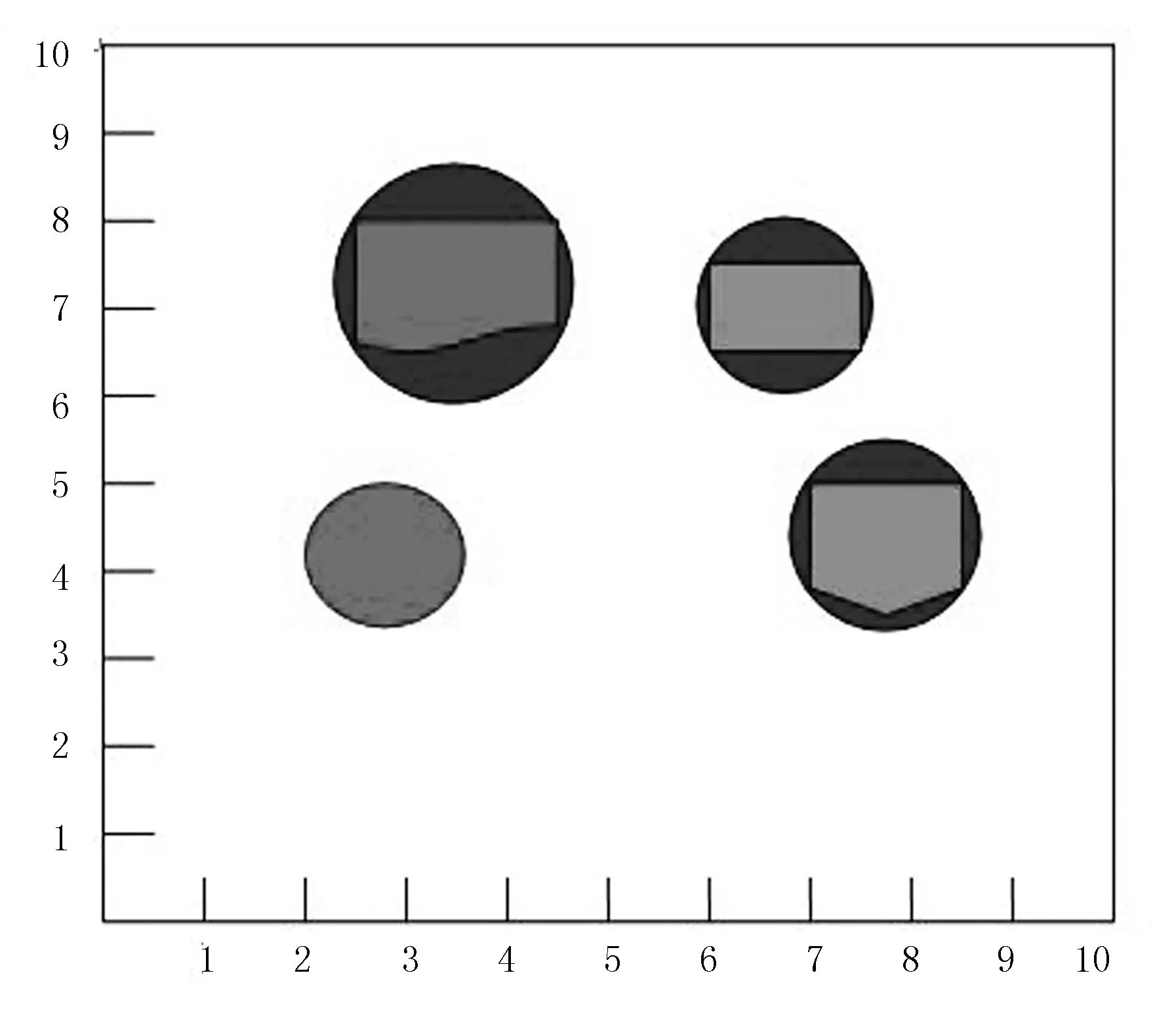
图3 环境模型障碍物示意图Fig.3 The schematic diagram of environmental model obstacle
1.2 采摘机器人障碍物建模
在采摘机器人作业中,会存在两类障碍物:一类是静止不动的;另一类是会以一定的速度运动的。本节将对运动的障碍物进行建模。

(1)
可以得到障碍物运动时的模型为
p(t+Δt)=p(t)+v(t)×Δt
(2)
式(2)可以转换为

(3)
继续化简为

(4)
式(4)就是所求的障碍物运动模型。
2 人工势场法概述
人工势场法的基本思路是建立一个人工势场,使得采摘机器人与障碍物之间存在斥力,与目标地点存在引力,然后根据势函数的下降方向规划最优路径。传统的引力势场计算公式为
(5)

Fat(P)=-
(6)
负梯度值随着采摘机器人和目标距离的减小而减小,直至0。
采用自制调查表,对患儿家属对治疗的满意度进行调查,量表总分0~100分,≥80为满意,60~79分为一般满意,<60分为不满意。
本文研究的内容是采摘机器人动态路径规划,其目标并非单一静止的,而是在时刻运动变化的。人工势场的势场引力示意如图4所示。

图4 人工势场的势场引力Fig.4 Potential field gravitation of artificial potential field
因此,传统的人工势场需要进行适当改进,定义为
Uat(P,V)=
ξp‖Pgoal(t)-P(t)‖m+lv‖Vtar(t)-V(t)‖n
(7)
其中,Vtar(t)和V(t)分别为目标和采摘机器人在t时间点的移动速度;ξp、lv为正参数;m、n为人工势场系数。由该引力势场生成的负梯度为
Fat(p,v)=-Uat(p,v)=-pUat(p,v)-
(8)
(9)
(10)
将式(7)带入式(8)可得
Fat(p,v)=Fat1(p)+Fat2(v)
(11)
Fat1(p)=kξp‖Ptar(t)-p(t)‖mNprt
(12)
Fat2(v)=flv‖Vtar(t)-V(t)‖nNvrt
(13)
其中,Nprt为采摘机器人指向目标终点的单位矢量;Nvrt为采摘机器人与目标终点相对速度的单位矢量。
3 采摘机器人动态路径规划
人工势场是将采摘机器人作业区域进行一种抽象的描述,在解决采摘机器人动态路径规划问题中,障碍物作为斥力产生目标,其具有一定的运动性。采摘机器人作为抽象势场主动方,其负梯度方向表示采摘机器人受到抽象力的方向。在这种力的作用下,采摘机器人避开障碍物,朝目标终点移动。
本文研究中采用人工势场法,采摘机器人动态路径规划程序框图如图5所示。
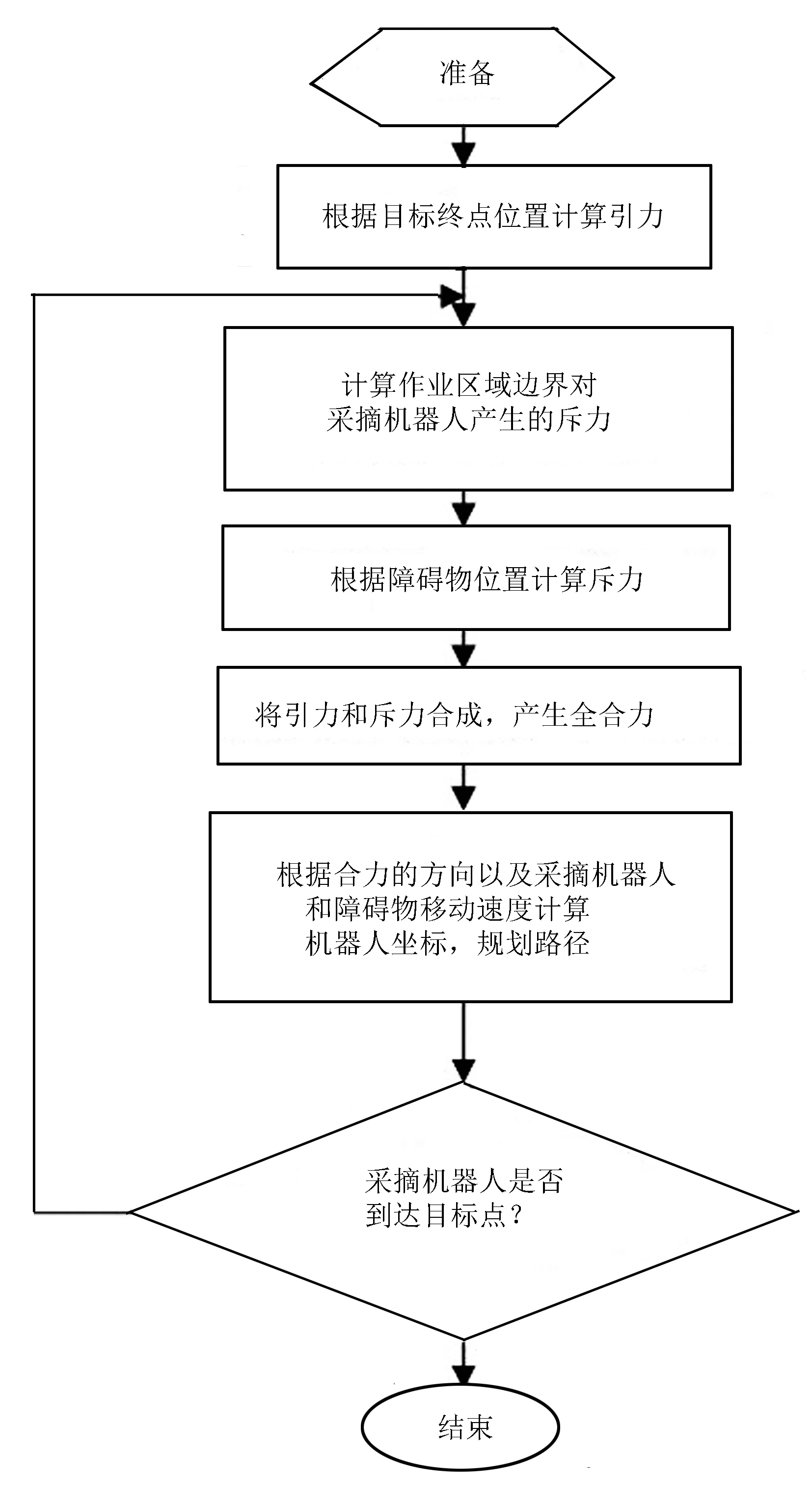
图5 采摘机器人动态路径规划程序框图Fig.5 The block diagram of dynamic path planning program for picking robot
采摘机器人动态路径规划具体流程为:
1)准备。采摘机器人动态路径规划的准备内容为设定各种参数:①人工势场引力系数Ka;②斥力系数为Kr;③采摘机器人与障碍物之间的安全距离为ρ0;④斥力作用距离为ρm;⑤设定采摘机器人最终应该到达的目标点。
2)计算引力。根据准备过程中设定的参数值,利用式(12)计算采摘机器人与应该到达位置之间的引力Fat1。
3)计算斥力。本系统要求采摘机器人在行驶过程中,不会和作业边界及障碍物发生碰撞行为。因此,采摘机器人会收到边界和障碍物两方面的斥力。
(1)边界的斥力。倘若采摘机器人和作业区域边界之间的距离小于斥力作用距离ρm时,其会受到该方面的斥力。那么,在计算斥力过程中,要考虑边界的斥力。
(2)障碍物的斥力。采摘机器人在移动过程中,会通过图像传感器、超声波传感器及红外传感器采集作业环境信息,确定障碍物的位置,并根据障碍物的位置计算与采摘机器人之间的斥力。
4)斥力和引力的合成。将采摘机器人受到边界和障碍物两个斥力利用式(8)合成,计算采摘机器人在人工势场受到的合力。
5)计算采摘机器人新坐标及规划路径。根据流程(4)合成的力及采摘机器人的移动速度,计算出采摘机器人当前位置,并根据势场力及障碍物位置信息,规划采摘机器人动态路径。
6)判断采摘机器人是否到达目标点。计算出采摘机器人新坐标后,首先判断其是否已经到达目标位置。如果是,则其完成当前任务;若不是,则应该重复3)、4)、5)流程步骤,直至达到目标位置。
4 仿真试验与结果分析
本文采用栅格法建立一个采摘机器人作业环境模型,以一个栅格大小为最小单位,模型中每个栅格都是采摘机器人的移动点。采摘机器人在移动过程中,只能向以自己为中心的周边5个落脚点移动,分为上下左右和其自身所处的位置。Actionselect=[0,1;0,-1;-1,0;1,0;0,0],采摘机器人移动方向只能是这5个中的1个。在环境模型中,障碍物采用红色表示。采摘机器人在移动过程中,根据周边5个方向的势力值,进行路径搜索。为了避免采摘机器人停留在上一位置时间过长,设定采摘机器人当前位置和周边栅格点势场值都为1 000。
为了验证基于人工势场法的采摘机器人动态路径规划系统是否能够满足设计要求,能够使采摘机器人在路径最优情况下到达目标位置,利用MatLab仿真软件设计了3组仿真试验。图6(a)设置比较简单的环境,图6(b)设置有死角的U型环境,图6(c)设置为动态的复杂环境。

图6 MATLAB仿真结果Fig.6 Simulation result of Matlab
图6(a)环境相对简单,采摘机器人经过简单调整就能避开障碍物到达了终点位置;(图6b)中模拟环境为一个U型死角,采摘机器人容易陷入局部最小值,但从最后采摘机器人路径可以看出,其在凹形环境下也能避开障碍物,到达终点位置;(图6c)中有3个静止的障碍物和3个运动的障碍物,但采摘机器人依然实现了最优的路径优化,顺利避障所有障碍物,到达了目的地。从路径长度和转弯次数可以看出:该系统优化效果明显,具有很好的避障和路径规划能力,验证了系统的有效性和实时性。
5 结论
针对果园环境不确定性因素大及采摘机器人作业特性,利用环境建模和自主定位方法,设计和研究了一套基于人工势场法的采摘机器人动态路径规划系统,并基于MatLab仿真软件进行了一系列的仿真实验。实验结果表明:该系统优化效果明显,具有很好的避障和路径规划能力,验证了系统的有效性和实时性,对采摘机器人动态路径规划具有重要现实意义。
猜你喜欢
重庆理工大学学报(自然科学)(2022年1期)2022-02-18
北京航空航天大学学报(2021年4期)2021-11-24
科技创新与应用(2021年31期)2021-11-09
指挥控制与仿真(2021年3期)2021-06-15
汽车工程(2021年12期)2021-03-08
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
北京汽车(2019年4期)2019-09-17
好孩子画报(2019年10期)2019-01-10
导弹与航天运载技术(2017年6期)2018-01-29