用于微创外科的线驱动连续型手术机器人设计与仿真研究*
2020-04-24 01:26赵智远朱德勇
机电工程 2020年4期
赵 亮,赵智远,朱德勇,刘 闯,李 毅
(1.中国科学院长春光学精密机械与物理研究所 空间机器人工程中心,吉林 长春 130033;2.中国科学院大学 材料科学与光电技术学院,北京 100049)
0 引 言
微创手术是一种可以避免或者减小手术切口,减短伤口愈合时间、减轻患者疼痛以及降低手术感染风险的外科手术方法[1]。手术机器人可以克服一些传统手术的局限[2]。
按运动结构不同,机器人可分为3类:离散型机器人、蜿蜒型机器人和连续型机器人[3]。离散型机器人难以在复杂环境下连续运动。蜿蜒型机器人难以在狭小空间的手术环境下工作。连续型机器人具有很强的弯曲性能,结构可以很小,可以在非线性狭小空间的手术环境下灵活操作。
美国范德堡大学的SARLI N等[4]研发了一种微创连续型手术机器人系统Turbot,该连续型结构采用单孔三通道方式,内含激光器、内窥镜、执行器,机器人用Ti-Ni合金驱动,不同温度下可以有不同的曲率,但该手术机器人负载小、稳定性低;美国卡耐基梅隆大学的TAKEYOSHI O等[5]开发了Cardio arm连续型手术机器人,连续型结构由50个刚性圆柱体构成,具有105个自由度,但其直径偏大,难以从人体自然腔道进入病灶部位;美国哈佛医学院的DUPOURQUÉ L等[6]开发了一种用于肺经支气管检查的连续型机器人,由3段连续型关节构成,每个关节由一根方向导线和两根不锈钢驱动线组成;英国利兹大学的GARBIN N等[7]研制了一种用于上消化道检查的便携式连续型内窥镜,由形状记忆合金材料的连续型关节和塑质材料的波纹管执行器组成,并在人体模型中进行了实验;哈尔滨工业大学的杨文龙等[8]开展了单孔腔镜的连续型机器人研究,研制的单孔腔镜长度为245 mm,直径为10 mm,末端安装有微型夹持器,但该机器人直径大,难以进入人体鼻腔、耳道等自然腔道;上海交通大学的徐凯等人[9]开发了一种用于微创手术的连续型手术机器人,可以自由伸缩轴向长度,但同样用了Ti-Ni合金,负载较小。
本研究将设计一种可以灵活进入狭小非线性空间的线驱动连续型手术机器人。
1 机械系统设计
1.1 UR机械臂选型
本文选择UR串联机械臂作为手术机器人系统的第一部分。该串联机械臂主要分为桌面机器人UR3、灵活型机器人UR5、大型机器人UR10。本文选择大型机器人UR10。
1.2 并联平台设计
在并联机器人的选择上,本文采用Gough-Stewart平台,上平台和下平台分别利用6个单腿促动器驱动,每个单腿促动器都由两边的十字铰链连接。
1.3 连续型末端执行器设计
连续型末端执行器由两个模块组成,并采用分布式弹簧结构,两个单元体用球关节进行连接,两个模块各自都有两个自由度,整体上采用钢丝线驱动。
连续型末端执行器机械结构如图1所示。
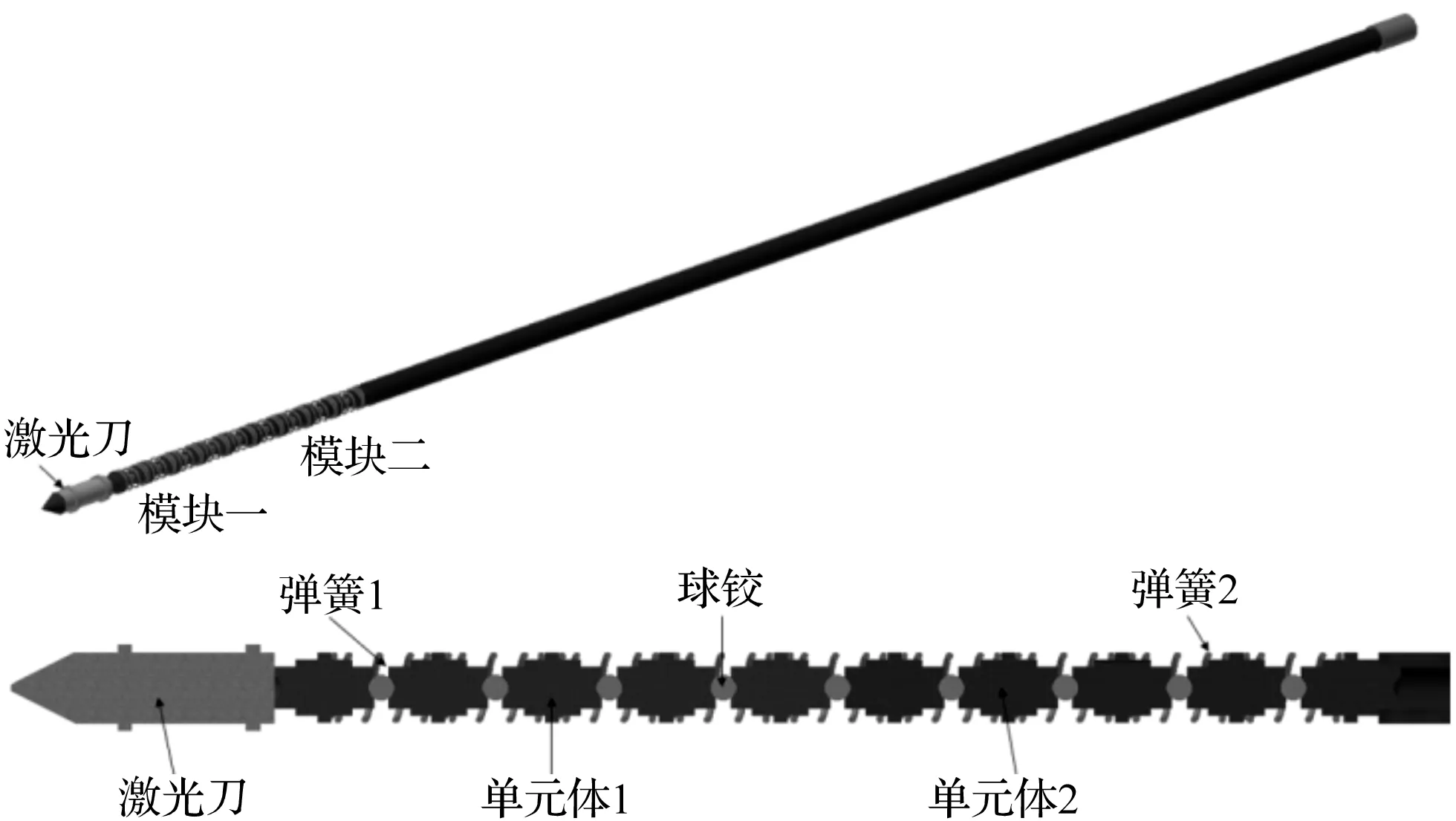
图1 连续型末端执行器机械结构
其中,模块1开有4个孔,4个孔中穿入驱动线来驱动模块1运动;模块2开有8个孔,其中4个孔用来穿过模块1的驱动线,另外4个孔用来穿过模块2的驱动线。整个连续型末端执行器具有4个自由度,最大外径4 mm,满足连续型末端执行器进入人体鼻腔、耳道等自然腔道的要求。
本文选择Maxon motor公司的EC40伺服电机作为动力源,Harmonicdrive公司的谐波减速器CSG-25-100-2A-GR作为减速装置,用来增加输出转矩;利用滚珠丝杠配合驱动线连接装置改变连续型末端执行器的驱动线长度,从而改变执行器的操作空间位姿。
1.4 力反馈主手选择
本文选择Sensable公司的Phantom作为手术机器人系统的触觉式力反馈手柄,主手装置中的一个连杆是底座,其他4根杆可以转动,一共具有6个自由度。医生操作Phantom装置的时候其末端关节会发生移动,前3个关节的每一个关节都安装了交流电机和编码器,具有记录角度的功能。
线驱动连续型手术机器人系统模型如图2所示。
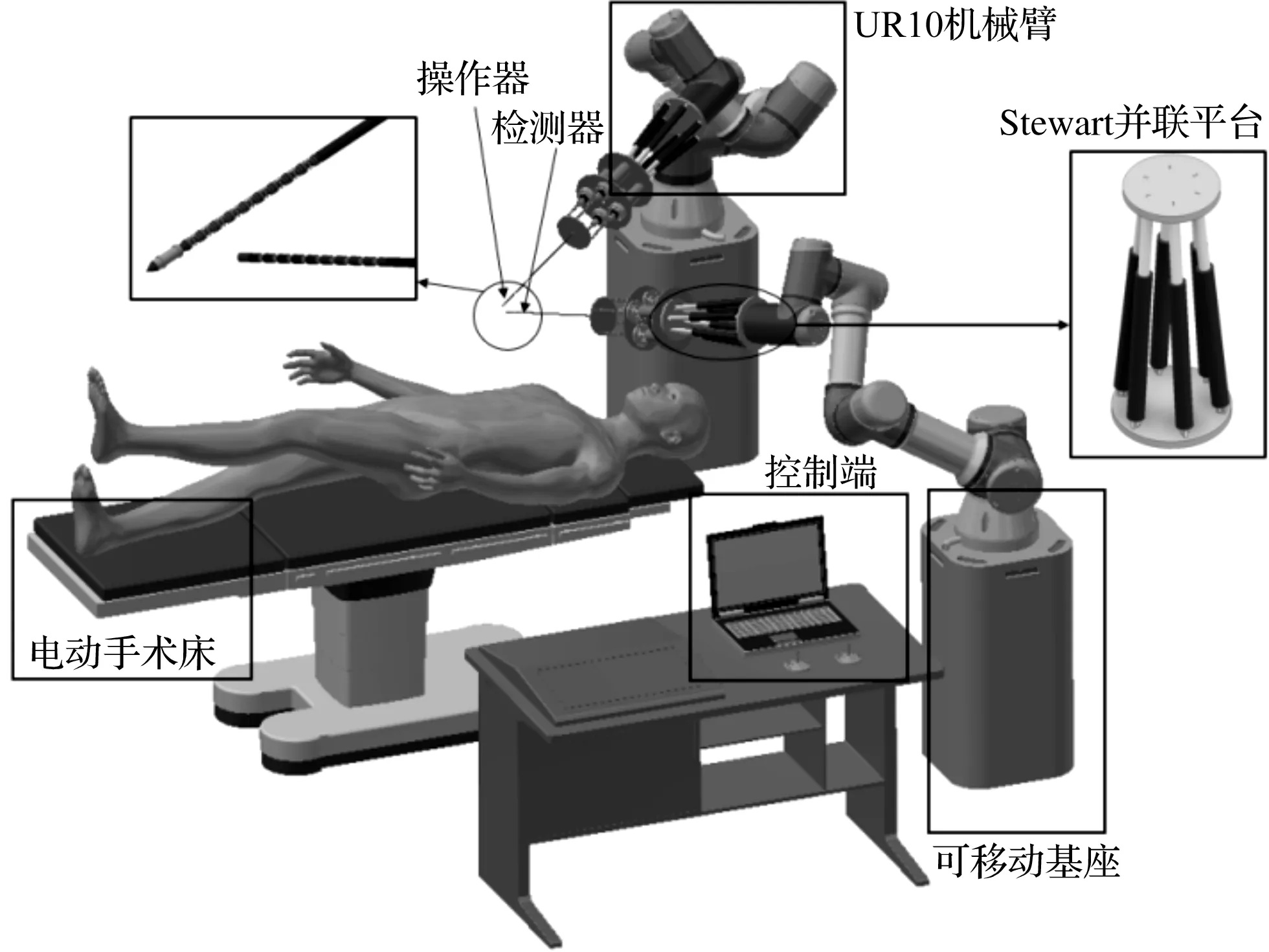
图2 线驱动连续型手术机器人系统模型
系统由UR10串联机械臂、Stewart并联平台、连续型末端执行器等组成。系统可以和5G技术相结合,实现远程手术。
2 运动学分析
2.1 串联机械臂运动学分析
本文利用D-H参数法建立UR机械臂的运动学模型,建立机械臂的连杆坐标系,求得连杆1对原始连杆的变换矩阵表达式为:
(1)
式中:l—连杆长度;φ—连杆转角;d—连杆偏距;θ—关节角。
则机械臂的末端坐标系相对于原始坐标系的齐次变换矩阵是:
(2)
2.2 连续型末端执行器运动学分析
为了得到连续型末端执行器的单个关节段的运动学模型[10-11],本文在其第一个关节段的基座圆盘中心点处建立基坐标系OXYZ,在其末端设立末端坐标系O1X1Y1Z1。
末端执行器单关节段运动学模型如图3所示。
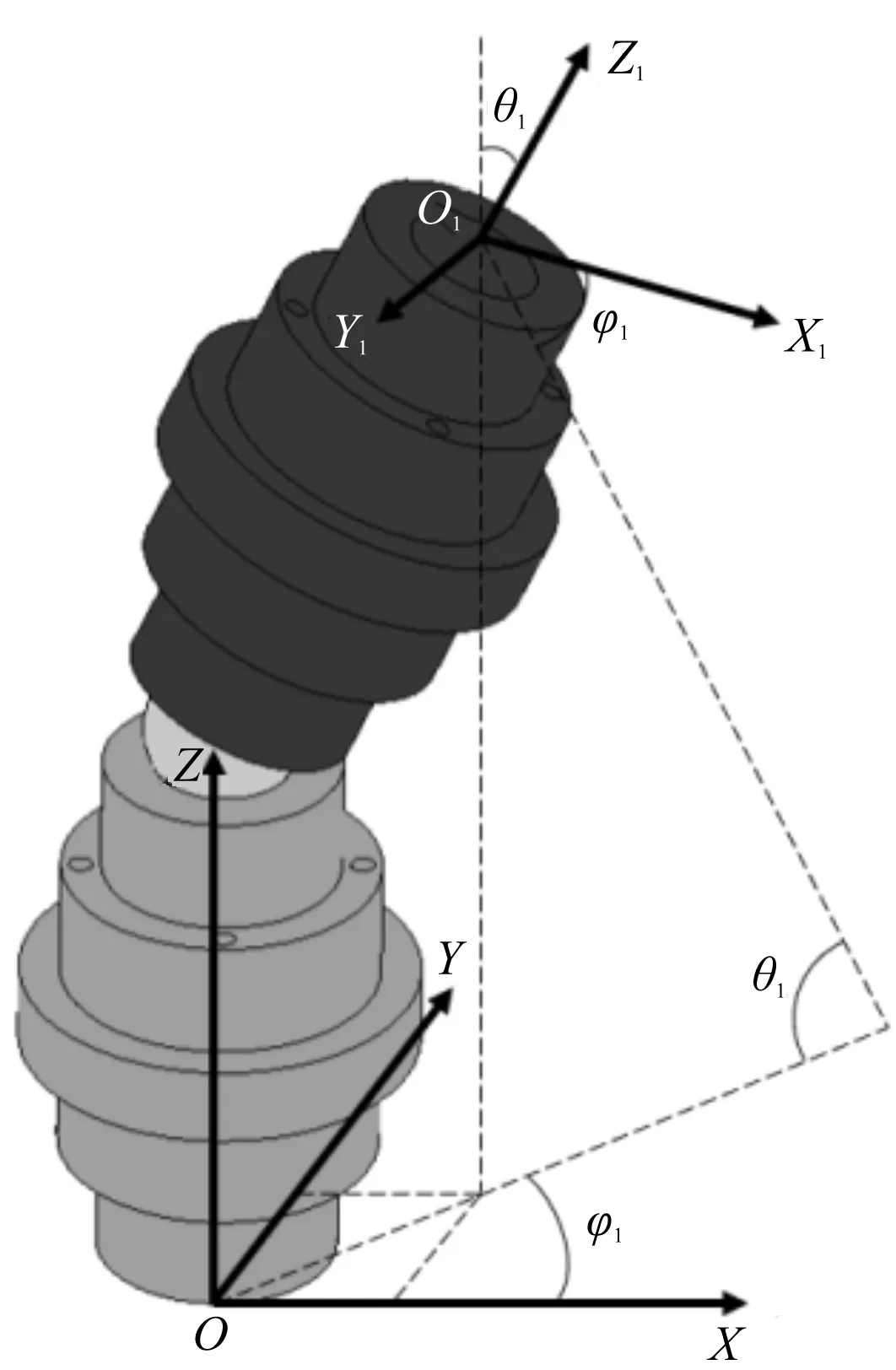
图3 单关节段运动学模型
首先原始坐标系OXYZ沿3个方向进行平移,其中,坐标系的O点移动到O1点,平移矩阵是:
(3)
再进行旋转变换,得到齐次变换矩阵的表达式是:
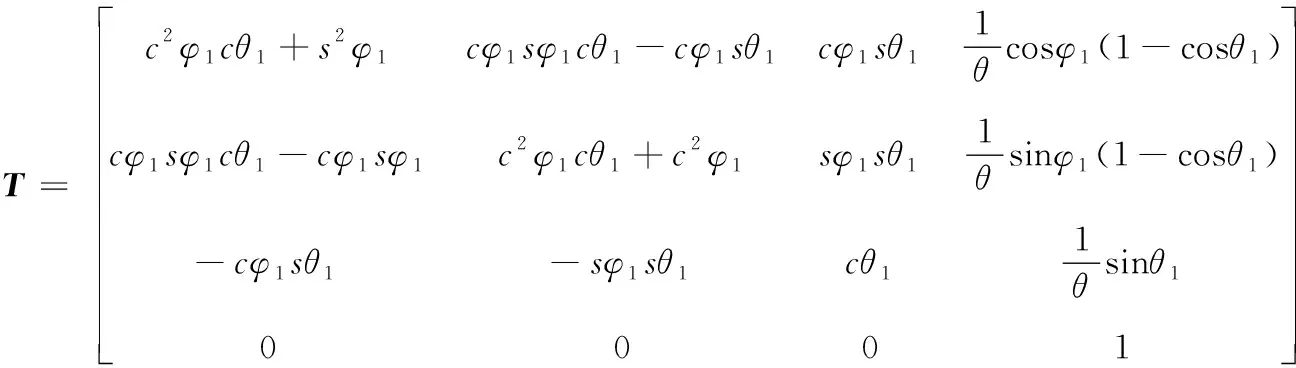
(4)
式中:φ1—坐标系绕Z轴旋转角度;θ1—坐标系绕Y轴旋转角度;-φ1—坐标系绕新的Z轴旋转角度;l—单关节段的长度。
逆运动学分析是根据执行器操作空间中的末端位姿计算关节空间中的关节变量。其矩阵表达式如下:
(5)
式中:R1—末端坐标系相对于原始坐标系的旋转矩阵;P1—末端坐标系在原始坐标系中的位置坐标;n,o,a—末端坐标系中3个坐标轴的单位矢量。
已知末端位姿,联立式(3,4),可求得对应的关节变量参数是:
θ1=arccos(az)
(6)
(7)
机器人弯曲时,单关节段驱动线模型如图4所示。
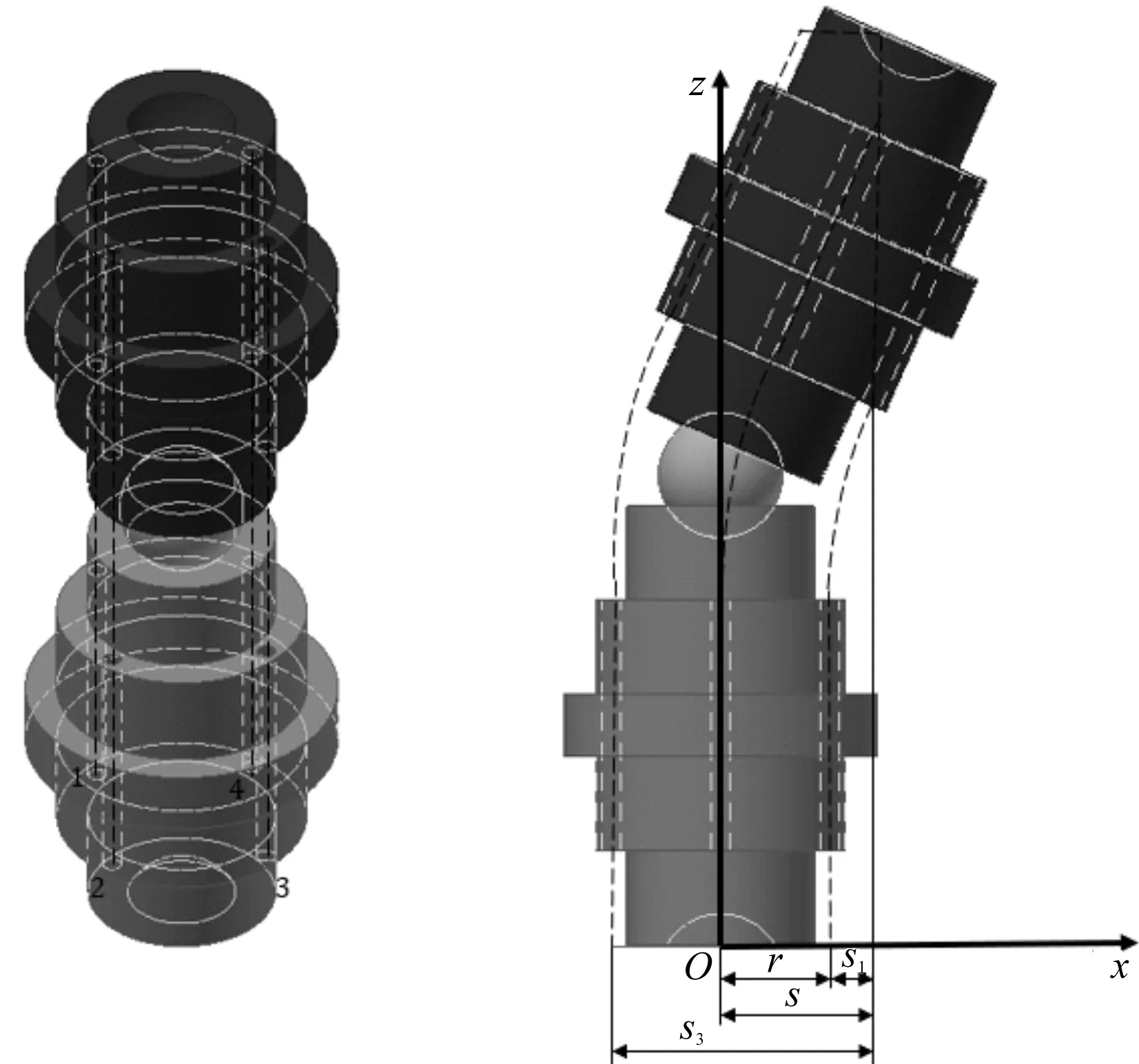
图4 单关节段驱动线模型
根据几何关系,可以得到连续型末端执行器单关节段驱动线的长度是:
(8)
式中:s1(i=1,…,4)—连续型末端执行器单关节段弯曲角度为θ1时的各个驱动线的弯曲曲率半径;s—连续型末端执行器单关节段轴线中心的弯曲曲率半径;r—圆盘基座上的孔和轴中心线之间的距离。
按照几何关系,所得的连续型末端执行器单关节段中的驱动线长度的变化量为:
(9)
为了验证相关运动学计算的正确与否,本文利用Matlab对运动学进行仿真,在驱动空间中输入4组不同驱动线长度变化量的数值,其变化量如表1所示。

表1 驱动线长度变化量
连续型末端执行器弯曲运动仿真如图5所示。
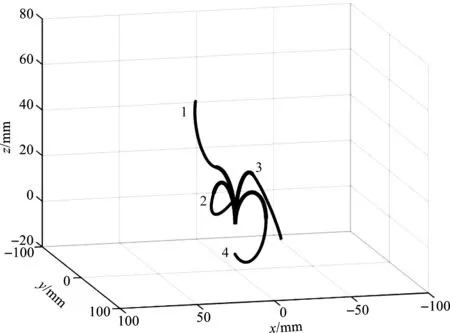
图5 连续型末端执行器弯曲运动仿真图
从图5可以看出:通过改变驱动线长度,就可以实现连续型末端执行器的灵活运动。该结果验证了本文运动学模型的正确性。
3 末端执行器工作空间分析
机器人的可达工作空间[12]是由机器人的几何形状和关节运动的限位决定的。机器人的工作空间是评价机器人工作能力的重要指标[13]。
一般机器人工作空间求解方法有:几何法、解析法和数值法[14]。本文采用数值法中的蒙特卡罗法计算连续型末端执行器工作空间[15]。首先笔者利用蒙特卡罗法取得连续型末端执行器关节组合,然后把机器人关节组合引入正向运动学计算中,得到机器人末端执行器在空间坐标系中的空间位置矢量,最后把位置矢量可视化,得到机器人工作空间[16]。具体步骤如下:
(1)利用数值随机函数来产生机器人空间关节变量的伪随机数;
(2)把取得的机器人空间关节变量值带入机器人正向运动学方程中,计算机器人末端的空间位置矢量;
(3)利用Matlab软件把第二步计算的机器人末端空间位置矢量可视化,所得就是机器人工作空间。
对于连续型末端执行器的正向运动学分析,首先利用蒙特卡罗法计算单关节段末端执行器的工作空间,再利用蒙特卡罗法对两关节段的末端执行器可达工作空间进行仿真;将计算的单关节段和两关节段工作空间放在同一个三维坐标系中,沿平面截开,可得到执行器可达工作空间,如图6所示。

图6 连续型末端执行器可达工作空间对比图
图6中,小的椭圆体是单关节段工作空间,大的椭圆体是双关节段工作空间。
4 结束语
面对狭小非线性手术环境的需求,本文设计了一种用于微创外科的线驱动连续型手术机器人系统。首先在Inventor软件中建立了连续型手术机器人系统的三维模型,然后对手术机器人进行了正向运动学和逆向运动学分析,并在Matlab中进行了仿真,最后利用蒙特卡罗法进行连续型末端执行器工作空间的计算。
仿真结果表明:连续型末端执行器可以灵活地弯曲,可达工作空间范围[-40,80],最远距离120 mm,符合狭小非线性手术要求。
参考文献(References):
[1] 王建辰.变刚度单孔手术机器人系统设计方法及主从控制策略研究[D].天津:天津大学机械工程学院,2017.
[2] 郑先锋.单通道蛇形手机机器人的开发及研究[D].西安:西安电子科技大学机电工程学院,2015.
[3] ROBINSON G, DAVIES J B C. Continuum robots-a state of the art[C]. IEEE International Conference on Robotics and Automation,Michigan: IEEE,1999.
[4] SARLI N, SIMAAN N. Minimal visual occlusion redundancy resolution of continuum robots in confined spaces[C].IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver: IEEE, 2017.
[5] TAKEYOSHI O, HOWIE C. A highly articulated robotic surgical system for minimally invasive surgery[J]. The Society of Thoracic Surgeons, 2009,87(4):1253-1256.
[6] DUPOURQUÉ L, MASAKI F, COLSON L Y, et al. Transbronchial biopsy catheter enhanced by a multi-section continuum robot with follow-the-leader motion[J]. International Journal of Computer Assisted Radiology and Surgery, 2019(9):1-9.
[7] GARBIN N, WANG L, CHANDLER H J, et al. Dual continuum design approach for intuitive and low cost upper gastrointestinal endoscopy[J]. IEEE Transactions on Biomedical Engineering, 2019,66(7):1963-1973.
[8] 杨文龙.面向单孔腔镜手术的连续型机械臂及其运动建模的研究[D].哈尔滨:哈尔滨工业大学机电工程学院,2016.
[9] SHUAN Z, QI L, XU K, et al. Configuration transition control of a continuum surgical manipulator for improved kinematic performance[J]. IEEE Robotics and Automation Letters, 2019,4(4):3750-3757.
[10] CRAIG J. Introduction to robotics: mechanics and control[M]. 3th ed. New York: Person Education, 2005.
[11] 陈光明,黄 旋.基于高压水射流的船体清洗机器人关键技术分析[J].流体机械,2019,47(9):56-62.
[12] 刘海涛,杨乐平,朱彦伟,等.空间机器人工作空间研究[J].组合机床与自动化加工技术,2011(8):26-29.
[13] 李保丰,孙汉旭,贾庆轩,等.基于蒙特卡洛法的空间机器人工作空间计算[J].航天器工程,2011,20(4):79-85.
[14] BOHIGAS O,MANUBENS M,ROS L. Complete method for workspace boundary determination[J]. IEEE Transaction on Robotics, 2012,28(5):993-1006.
[15] CAO Y, LU K, LI X. Accurate numerical methods for computing 2D and 3D robot workspace[J]. International Journal of Advanced Robotic Systems, 2011,8(6):1-13.
[16] 田海波,马宏伟,魏 娟,等.串联机器人机械臂工作空间与结构参数研究[J].农业机械学报.2013,44(4):196-201.
猜你喜欢
课程教育研究(2021年27期)2021-04-13
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2019年8期)2019-09-03
重型机械(2019年3期)2019-08-27
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年9期)2017-11-27
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
海军航空大学学报(2015年1期)2015-11-11