
一种清洁机器人清洁效率测试方法的研究*
2020-05-30 01:02刘念源潘锦萍
机电工程技术 2020年4期
褥 铜,刘念源,潘锦萍
(1.顺德出入境检验检疫局综合技术服务中心,广东顺德 528303;2.重庆海关技术中心,重庆 400025)
0 引言
清洁机器人在欧美韩日普及度高,其技术检测标准也比较细化,而我国清洁机器人的发展迅速,各种品牌的性能参差不齐[1]。而目前专门针对家用智能清洁机器人性能检测的技术平台较少,对智能清洁机器人清洁能力的测试与评估的指标相对单一,特别是对于清洁效率相关的路径规划检测的指标不足。
1 测试需求分析
1.1 标准需求
国际电工委员会与欧盟于2014年出台了《IEC 62929:2014家用清洁机器人干燥清洁:测量性能的方法》[2]、《EN 62929:2014家用清洁机器人干燥清洁:测量性能的方法》[3],而我国则于2015年出台了《QB/T 4833-2015家用和类似用途清洁机器人》[4]。从标准的内容看,我国标准部分参照了IEC和EN标准的内容,测试内容包括覆盖率、硬地板除尘能力、边角除尘能力、防跌落能力、越障能力、自动充电功能、预约清扫功能、遥控功能、噪声、工作寿命。IEC和EN标准则更细化和具体,设计的试验场景更加复杂,除了硬地清洁之外,还包括了地毯清洁方面的内容,主要测试内容包括空间除尘能力、直线除尘能力、自动导航/覆盖能力、机器人平均速度。无论是国标还是IEC和EN标准,体现清洁效率与能力的主要测试为覆盖率(自动导航/覆盖能力)、硬地板除尘能力(空间除尘能力、直线除尘能力、边角除尘能力)的测试,另外,IEC和EN标准中的平均速度的测试也有效体现出清洁机器人的整体清洁效率。
1.2 企业需求
智能清洁机器人技术上最复杂的就属路径规划,国内清洁机器人的清扫路径规划智能化不足,市场上90%的清洁机器人清扫路径是随机性的,或者只有4种路径,智能感不强[5]。对于路径规划技术需求的痛点,研发企业需要通过轨迹跟踪测试,挖掘清洁机器人对于复杂环境的路线规划水平,进行不断的优化和迭代。
1.3 设计目标
本文通过图像识别的方式,实现轨迹跟踪的测试,该轨迹跟踪可适用于覆盖率测试(Coverage test)、直线测试(Straight line test)、平均速度测试(Average speed test),其设计目标参数:位置分辨率(Position resolution)小于或等于1 cm;位置精度(Position accuracy)小于或等于1 cm;采样频率(Samplingrate)大于或等于30 Hz。
另外,该系统也可适用于一般的静态图像的清洁范围的计算,通过实验灰清扫区域与未清扫区域的图像区域比值计算,实现硬地板除尘能力、边角除尘能力等静态图像的测试。
2 视觉追踪系统设计
视觉追踪系统是测试清洁效率的关键,需要识别出清洁机器人的实时位置,生成平面移动的轨迹,并根据清洁机器人的有效清洁区域,模拟出动态的覆盖率。
2.1 移动物体(清洁机器人)追踪识别
目标物体识别是计算机视觉领域中最早研究的内容[6],基于特征的图像配准方法因其计算量较低,对位置变化较敏感,同时降低了噪声、遮挡、光照和图像变形的影响,成为当前主流的配准方法[7]。本文选用应用比较广泛的SIFT算法进行移动物体的识别,SIFT算法在图像平移、旋转、缩放、视角变换和光照变化等因素下具有很好的效果[8]。
对摄像头输入的二维图像I(x,y)与二维高斯核函数G(x,y,σ)进行卷积滤波,得出L(x,y,σ),公式表示如下:

建立图像的DOG金字塔尺度空间,扫描DOG空间的像素点,与邻域像素点(26个)进行比对,该像素点为邻域中的最大值,则可以判定该点为极值特征点,2个相邻尺度空间的差值用D(x,y,σ)表示:

通过差值算法极值特征点进行优化,选取关键特征点,以关键点特征点与邻域像素的梯度计算比对,得出关键特征点的方向θ(x,y),公式表示如下:

为得到更多可靠的SIFT特征匹配对,并提高配准精度与速度,本文采用降维的方法降低运算,采用24维特征描述符代替原有的128维特征描述进行特征向量计算[9]。
清洁机器人作为移动物体,在三维空间中主要是以平面和与平面相垂直侧面的形态出现。因此,在动态输入上的图像上,通过动态的前一帧与后一帧图像作为待比对图像,识别出移动的物体图像,计算出运动的轨迹。清洁机器人有效的清洁区域位于下表面(非可视表面),根据可视的上表面图形特征提取清洁区域结合轨迹坐标计算,模拟输出实际清洁轨迹区域,整个轨迹识别输出流程如图1所示。
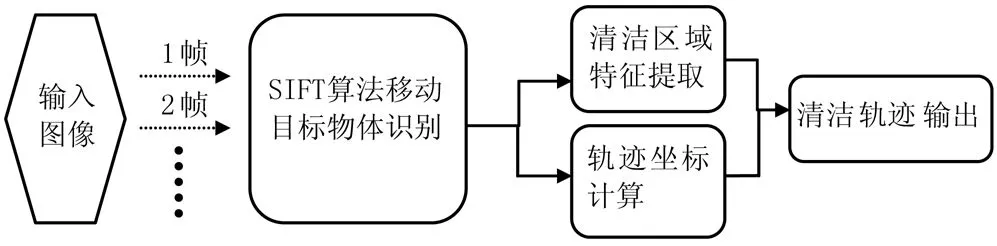
图l 轨迹识别输出流程
2.2 精度测试
识别轨迹的位置精度可以通过实际测量位置进行与放置测量轨迹对象(清洁机器人)的示值进行比对,对轨迹跟踪系统进行精度测量。轨迹跟踪系统采用200万像素的Logitech C920摄像头作为图像输入装置,采样频率30 Hz,满足实验采样频率大于或等于30 Hz。图像分辨率为1920pixel×1080pixel,测试图像实际试验区域最大边长小于或等于500 cm,满足分辨率小于或等于1 cm的参数要求。
本文以试验台的边缘距离作为测量基准,对位于X,Y方向的6个位置与试验台边缘的实际距离进行测量,如图2所示,使用轨迹跟踪系统对其进行识别并标出实时的中心坐标位置,通过与实际空间的标定距离与跟踪系统的实时坐标距离来进行对比,测试出位置精度是否满足系统设计的要求。根据表1位置精度的测试值,测试的位置精度偏差小于1 cm,满足位置精度的要求。

图2 测试位置
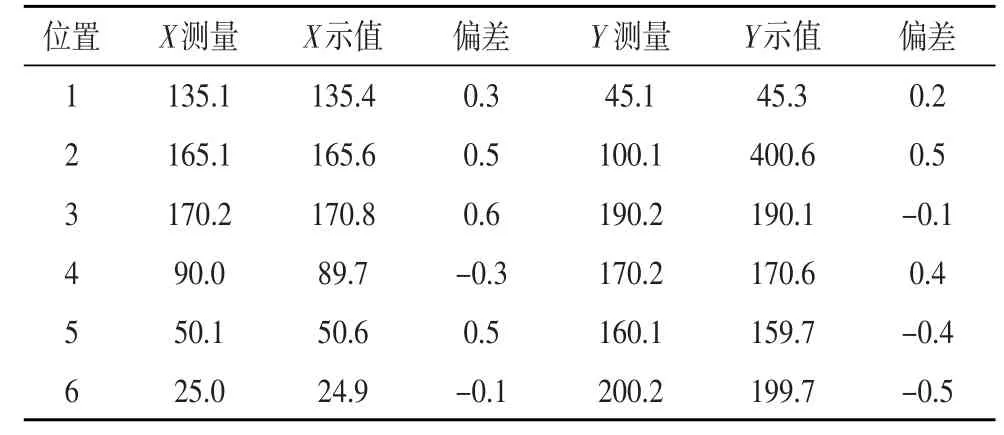
表1 位置精度测试值cm
2.3 覆盖率(清洁率)测试
通过图像特征的识别,描绘出运动的轨迹,按照清洁机器人清洁头宽度(机器人清扫面积),生成覆盖的轨迹图形,并根据覆盖率的计算公式C(t)={A(t)/A}×100%,计算覆图形的面积进行覆盖率(清洁率)测试。式中:A(t)为实时覆盖率(清洁率),不包括重复覆盖区域;A为实验区间面积(测试面积);t为测试时间(清扫时间)。测试如图3所示。
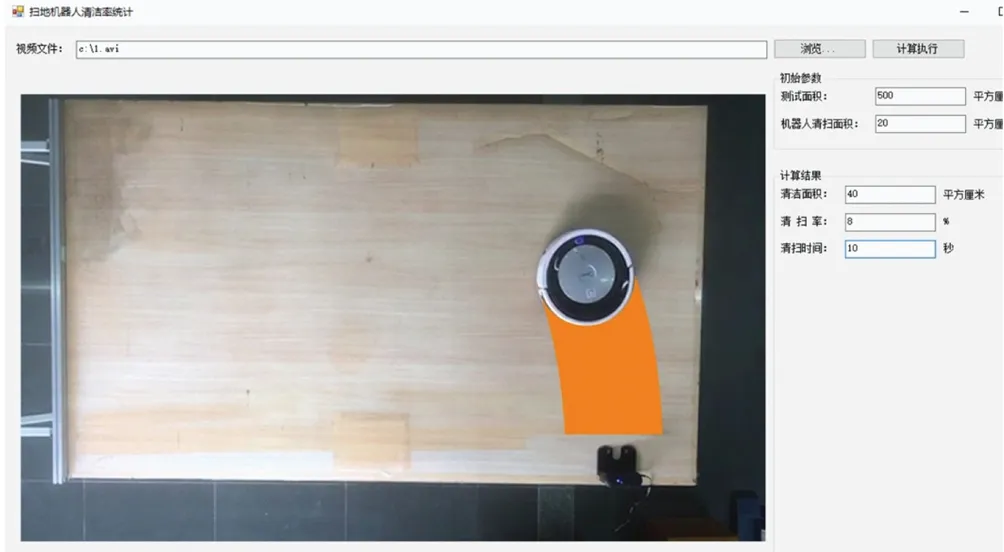
图3 覆盖率(清洁率)测试
3 结束语
本文通过分析清洁机器人国内外标准的测试要求与企业研发的需求,明确清洁机器人清洁效率测试的关键指标。通过采用SIFT算法结合清洁区域特征,实现移动物体(清洁机器人)的追踪识别,为清洁机器人清洁效率测试开发了原型系统。该原型系统有效满足测试精度的要求,应用于相关的覆盖率测试、直线测试、平均速度等,为相关企业做技术研发提供标准化与个性化的测试服务,对提高我国智能家用清洁机器人生产研发企业的技术水平有积极意义。
猜你喜欢
今日农业(2022年15期)2022-09-20
今日农业(2021年21期)2021-11-26
石材(2020年10期)2021-01-08
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
山东冶金(2019年1期)2019-03-30
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
西南交通大学学报(2016年6期)2016-05-04
林业与生态(2016年2期)2016-02-27
