用于测量长光程CO和CO2 浓度的TDLAS传感器系统室内试验
2020-06-08 04:35李永刚李洪刚
天津科技 2020年5期
李永刚,张 涛,李洪刚
(1.天津同阳科技发展有限公司 天津300384;2.天津市环境监测技术企业重点实验室 天津300384)
0 引言
近年来,以可调谐二极管激光吸收光谱技术为理论基础的气体传感器已广泛应用于控制工业燃烧过程,减少污染物和提高产品质量[1-3]。该类型的气体传感器时间分辨率高、灵敏度高、抗干扰性强,因此可用于恶劣环境下监控气体的浓度、温度等重要现场参数。而分布式反馈(Distributed Feedback,DFB)激光器凭借紧凑性、坚固性、兼容性高及操作简单等自身优点,已成为TDLAS(可调谐半导体激光吸收光谱)气体传感器中激光光源的重要选择之一[4,5]。
一氧化碳(CO)和二氧化碳(CO2)的浓度在燃烧诊断中意义重大,对于碳氢燃料系统,燃烧尾气中CO和CO2的浓度是燃烧效率的重要指标[6]。目前已有许多文献阐述了同时测量CO和CO2气体浓度,如:顾海涛等[7]选择测量CO和CO2中心频率分别为1577.64 nm 和1577.79 nm,光程长度50 cm 下测量CO和CO2的浓度下限分别为0.042%和0.022%;董凤忠等[8]根据TDLAS技术研制道边实时监测机动车尾气仪器用于测量CO和CO2,谱线的中心波长1579.737 nm 和1579.574 nm,并进行了实地检测,准确性较高。以上研究成果均对本文的长光程测量具有重要的参考意义。
考虑目前道路上机动车尾气CO与CO2长光程测量的精度要求,选用波段分别为2327 nm 和2004 nm 的DFB激光器,保证其吸收线强足够大且不受干扰,结合TDLAS技术的直接吸收测量方法,搭建了可用于CO和CO2同时检测的长光程对射式气体传感器模型,为实验室环境下机动车尾气CO和CO2的测量奠定基础。
1 基本原理
TDLAS技术通过气体分子对不同波段激光的“选择性吸收”进行气体浓度检测,其原理基于朗伯-比尔(Lambert-Beer)定律[9,10]。由朗伯-比尔定律可知,气体在光度为:

其中:Ii(ν)为入射光强,Io(ν)为穿过待测气体后的出射光强,S T )为吸收谱线的线强,P 为待测气体的压强,L为气体吸收的光程长度,φ(ν)为气体线型函数,χabs为待测气体的浓度。
为了便于计算,一般对线型函数进行归一化处理,即:

据此,对吸光度α(ν)求积分后得到光谱积分吸光度 A(ν):

由以上公式可知,当压强、光程长度和吸收线强度已知时,根据气体的积分吸光度即求得待测气体的浓度。积分吸光度根据气体的出射光强与入射光强计算。已知经气体吸收后的出射光强为 Io(ν),而气体的入射光强无法准确获得,为了便于计算,本系统选择根据出射光强进行基线拟合,并在合理范围内加宽激光器的扫描范围,使得基线的拟合更为准确。
为简化计算量,本激光传感器系统并未对线型函数进行拟合,而是根据气体吸收的线性,选择吸收峰的峰高反演气体浓度。此外,在实际测量过程中,由于光程长度较长(大于24 m),空气中CO和CO2对测量结果的影响已不能忽略,因此浓度反演算法中需实时扣除空气中CO和CO2的背景吸收。
2 试验系统
本系统采用DFB半导体激光器作为激光光源,可调谐特性强,输出激光功率高,动态单模性良好,且波长范围可有效覆盖近红外波段。根据Zhou等[11]提出的谱线选择要求,选择合适的吸收谱线。由图1可知,选择的CO和CO2吸收峰无气体间的交叉干扰,不受空气中H2O气体的干扰,也能避免NO和NO2等尾气气体的干扰。此外,根据HITRAN2012数据库[12]可知CO和CO2的吸收线强的数量级为e-21,满足测量要求。
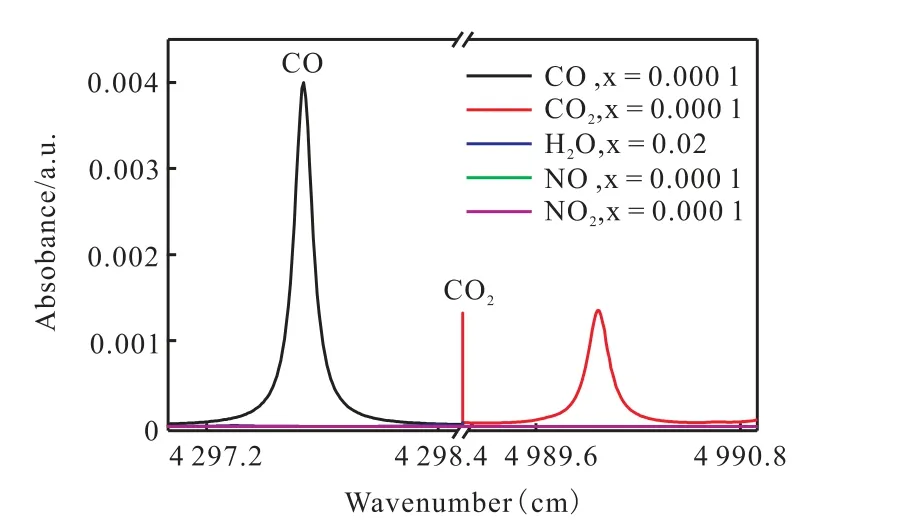
图1 CO、CO2、NO、NO2和H2O的吸收谱线图(HITRAN,T=300 K,P=1 atm,L=100 cm)Fig.1 Absorption spectrum of CO,CO2,NO,NO2 and H2O(HITRAN,T=300 K,P=1 atm,L=100 cm)
以此为基础搭建本激光传感器系统,模块包括:CO激光器(NP-DFB-2004-TO5,nanoplus)、CO2激光器(NP-DFB-2327-TO5,nanoplus),自制锁相放大模块,自制激光驱动模块,自制角锥棱镜模块,自制校准气室(L=20 cm),非球面镜(C036TME-D,ThorLabs),90°离轴抛物面镜(MPD229H-M01,ThorLabs),光电探测模块(PDA10D2,ThorLabs)。其中激光器、非球面镜、离轴抛物面镜、校准气室的连接方式及系统结构如图2所示。

图2 同时测量CO和CO2的激光传感器系统示意Fig.2 Laser sensor system diagram for synchronous monitoring concentrations of CO and CO2
图2显示,锁相放大模块产生信号,传输至激光驱动模块将电压信号转换为电流信号,控制激光器将电流信号转化为光信号,光信号通过离轴抛物面镜的中心孔射出后被对路另一侧的角锥棱镜反射回来并汇聚在离轴抛物面镜的焦点上,由光电探测器检测到在光路上被气体吸收后的光信号,被锁相放大模块中的采集卡采集并进行处理,最终求得气体的浓度。
3 试验结果
根据Bartzis等[13]搭建的机动车尾气的扩散模型——三维计算流体动力学(CFD)模型,利用CFD模型计算出机动车在速度为60 km/h、风速为5 m/s驶过后CO的扩散速度,得到的结论为机动车尾气的扩散速度极快,在车辆驶过约0.5 s后CO的浓度衰减近10000 倍,1 s后与空气中的背景浓度持平。由此可知,利用TDLAS技术对机动车尾气浓度的测量须保证在车辆驶过后的几十毫秒内完成,对测量系统的时间灵敏度要求极高,因此设置锯齿波的扫描频率为100 Hz。
将系统在实验室环境下进行CO和CO2浓度的长光程检测实验,以确定测量气室中CO和CO2浓度的准确性。将气室与角锥棱镜的距离分别设置为12、13、14、15 m,在进行测量时,首先采集大气中的背景谱线并进行记录,随后在气室中充入不同浓度的CO和CO2,同构动态校准仪将浓度为99.9%的CO切割为2%、5%、8%、10%,将99.95%浓度CO2切割为3%、8%、13%、16%。得到CO、CO2浓度的测量结果分别如图3、图4所示。
由图3可知,在24~30 m 光程长度内,浓度为2%、5%、8%、10%的CO最大测量误差分别为-7.3%、0.5%、4.8%、4.4%;由图4可知,在24~30 m 光程长度内,浓度为3%、8%、13%、16%的CO2最大测量误差分别为5.34%、-5.2%、-7%、-7.03%。可以看出,CO2的测量结果误差略大于CO,分析认为,大气中的CO2浓度比CO高,波动范围大,对测量影响较大,导致测量结果的误差大于CO。
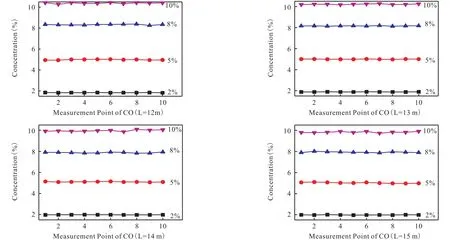
图3 CO的浓度测量结果Fig.3 Measurement result of CO concentration
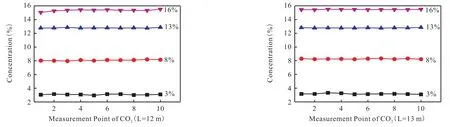
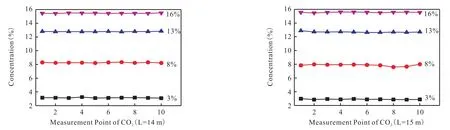
图4 CO2的浓度测量结果Fig.4 Measurement result of CO2 concentration
4 结论
利用TDLAS技术的分辨率高、响应速度快等优势,搭建了一套以直接吸收光谱技术为基础的用于仿真机动车尾气检测的实验室系统。选择利用气体吸收谱线的峰高获得气室内CO和CO2的浓度,并对气室内不同浓度、不同光程的2种气体进行浓度检测,最大测量误差不超过10%,对搭建机动车尾气中CO和CO2的浓度检测有一定的参考意义。针对测量过程中CO2浓度受空气中背景浓度影响的情况,需在之后进行技术上的改进。
猜你喜欢
中国科技财富(2022年8期)2022-12-18
物理学报(2022年10期)2022-06-04
天津诗人(2021年1期)2021-11-12
物理实验(2020年12期)2021-01-06
科学(2020年6期)2020-02-06
消费导刊(2018年10期)2018-08-20
电子制作(2018年9期)2018-08-04
电子制作(2016年1期)2016-11-07
汽车维护与修理(2015年1期)2015-02-28
高中生·职教与就业(2013年3期)2013-05-30