
基于四轴运动控制教学平台的多元实践体系改革
2020-06-18 04:06史莹晶
实验室研究与探索 2020年3期
史莹晶, 李 瑞, 梁 颖
(1.电子科技大学自动化工程学院,成都611731;2.中航工业成都飞机工业有限责任公司,成都610000)
0 引 言
自动化作为一个与工程实践紧密结合的专业学科,有着很强的实践性和应用性。但是,现今大多数高校在自动化专业的教学中还是“重理论、轻实践”,导致了理论与实践脱节的现象。部分高校虽然针对不同的课程安排了相应的实验环节,但是所设的实验多为验证性实验,不能够充分调动学生利用所学知识来解决实际问题的积极性。除此之外,自动化专业包含自动控制原理、微机原理、电力电子技术等众多专业基础课程,由于教学过程的分离,导致学生不能够从整体上将各门课程所学知识有机地结合起来,形成一个完整的知识体系[1-5]。
针对以上问题,设计了一款小型运动控制教学平台,该平台将实际工业场景中的运动控制分拣平台小型化,具体涉及运动控制、嵌入式、单片机、C语言以及传感器检测技术等课程相关知识[6-7]。不同于直接购买的运动控制教学设备,该运动控制教学平台一方面主要面向实际应用,另一方面底层软硬件开放,具备很大的开发改进空间。可使学生在具体的实践过程中了解实际的工程应用,为培养适应于社会的应用型人才、实现卓越工程师教育培养目标起到了重要作用。将该平台应用于自动化专业学生的教学中,在改善教学效果的基础上,进一步提高学生的创新能力和应用实践能力。
1 运动控制教学平台的硬件结构
为了与现今市场上的主流实现方案相一致[8-10],设计的运动控制教学平台是基于ARM和DSP双CPU结构实现的独立嵌入式运动控制平台,其中,ARM 以其运算速度快、外设设备丰富的优势作为主CPU,实现整体控制和对外扩展,DSP 则选用专用的运动控制芯片PCL6045B,实现核心的运动控制功能,具体包括:单轴速度及位置设定与调节、任两轴的直线插补、任两轴的圆弧插补、三轴直线插补、最高速度的自动修正、停止时震动抑制以及多种原点复归方式等。由于主控CPU采用现阶段应用最为广泛的STM32 系列芯片,故而能够在实践过程中帮助学生了解和熟悉行业内的主流应用。同时,还能够以该教学平台为例对微机原理或嵌入式等课程中相关的知识点进行讲解,加深学生对理论知识的理解。整个运动控制教学平台的结构如图1 所示。

图1 运动控制教学实践平台硬件体系结构
整个运动控制系统中的运动控制器部分发出3 路运动控制信号(分别对应于空间中的3 个轴),经由相应电动机驱动器驱动电动机以一定的速度转动一定的角度,进而带动相应的机械装置进行运动,实现相应的运动控制功能。该运动控制系统可实现速度以及位置的设定与调节、直线插补、圆弧插补以及限位和原点操作。
为了进一步增强整个运动控制系统的智能性,拟合实际工业场景中的检测分拣装置,添加视觉反馈单元来实现对移动目标的检测追踪[11-12]。融合视觉检测的闭环运动控制系统能够实时检测移动目标,并根据移动目标的运动状态选择相应的运动模式来控制机械执行机构实现对移动目标的追踪抓取[13]。整个系统的最终实现如图2 所示,具体包括相应的运动控制器、驱动器、电动机、机械执行机构以及相应的反馈机构。

图2 运动控制教学平台的硬件
该运动控制系统能够很好地模拟实际工业场景中的分拣装置,让学生能够基于该运动控制教学平台对控制系统的组成有个整体认识,进而帮助学生将所学的基础课程融会贯通。
2 运动控制教学平台软件架构
为了便于学生在具体的实践过程中积极创新,将相关的运动控制功能进行应用程序编程接口(Application Programming Interface,API)封装,方便二次开发。另外,不同于直接购买的运动控制平台,该运动控制教学平台是基于ARM +PCL6045B 架构实现的,所以整个运动控制平台不但能够实现基本的运动控制功能,还将底层软硬件开放给有余力的学生,使得这部分学生能够充分发挥创造性,进一步对运动控制平台进行开发,增强运动控制教学平台的实用性。运动控制教学实践平台的软件架构如图3 所示。
由于整个运动控制器部分是基于ARM +PCL6045B 架构实现的,所以对基本运动控制功能进行封装是通过STM32 以一定的时序对PCL6045B里面相应的寄存机读写来实现的。通过这部分的实践,不但能够加深学生对微机原理以及嵌入式等课程的认识,还能够锻炼学生的C 语言编程能力,帮助他们通过所学的知识来解决实际的问题。
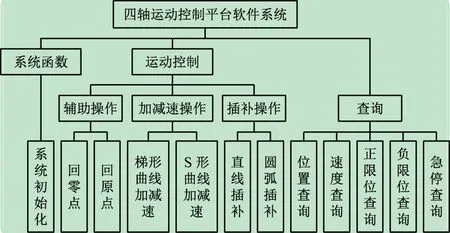
图3 运动控制教学实践平台的软件架构
3 基于运动控制教学平台的多元实践体系
作为自动化等相关专业的核心课程之一,运动控制结合众多相关专业课程,综合性和实践性强,很适用于高校相关专业学生的实践课程[14-15]。开发的运动控制教学平台基础功能丰富、系统开放性高,可同时用于运动控制常规实践和运动控制创新实践。运动控制常规实践即是对调速、定位以及直线\圆弧插补等运动控制功能的验证,运动控制创新实践则是在已实现运动控制系统的基础上,充分利用平台的开放性来对其进行扩展。
运动控制教学平台包含人机交互、运动控制器、驱动装置、电动机、机械执行机构以及相应的反馈机构,具体涉及嵌入式、电动机拖动、C 语言编程、传感器检测技术以及机器视觉等相关课程。前期的学习主要是通过课堂理论教学,相应的实践环节也是对相应知识点的验证,比较单一且不贴近实际,导致学生常常是为了实践而实践,并没有主动去思考。通过整套运动控制教学平台就可以将以上各相关课程所学的知识进行融汇,贯穿成一条线,用于解决实际问题,真正地做到学以致用。构建的运动控制实践教学平台的多元实践体系如图4 所示。

图4 基于运动控制实践教学平台的多元实践体系
3.1 运动控制常规实践
运动控制常规实践主要用于对相关理论的验证,并对某些难以理解的知识点进行实际演示,使学生能够从理论和实践两个层面同时对相关知识点有全面的认识。比如教授完数控相关课程后,就可以运用该教学平台实际演示一下相应的直线或圆弧插补;教授完传感器检测或视觉检测等相关课程后,就可以通过平台上的视觉反馈和限位检测来加深学生对相关理论知识的理解。
针对本平台,设计了一组常规运动实验,包括直线加减速控制、曲线加减速控制、直线插补运动控制、圆弧插补运动控制等实验。在实验开展过程中,将参与课程的学生分组,每组学生可以根据自己的兴趣参与一个或多个实验。受篇幅所限,本文仅就“两轴直线插补运动控制实验”给出介绍。
当选择基于最小偏差法的直线插补算法时,设计步骤如下:
(1)区分长短轴。在插补过程中,长轴一直做匀速运动,短轴则需要根据最小偏差值判断决定是否运动。
(2)计算偏差函数值。设系统当前所在点为p(xi,yi),终点坐标为(xe,ye)。当长轴方向上进给一个脉冲当量后,偏差函数为F(Δx),在长轴、短轴上均进给一个脉冲当量后,偏差函数为F(Δx,Δy),因而,需要判断Fi=|F(Δx,Δy)|- |F(Δx)|的符号。易知:Fi=F(x)+F(x,y)=2xeyi-2yexi-2ye+xe。
若Fi>0,则朝X 轴方向进给一个脉冲当量;若Fi≤0,则朝X、Y轴均进给一个脉冲当量。
(3)判断运动终止条件。设Xstep表示X轴方向的进给步数,每朝X轴进给1 步,则给出Xstep+1,当Xstep
等于xe时,说明已经运动到终点,否则继续进行插补运算。图5 为在Matlab 中实现的最小偏差法的直线插补仿真曲线。

图5 最小偏差法直线插补曲线仿真
在开展了基于Matlab 的插补算法分析基础上,将指导学生完成直线插补算法的现场可编程逻辑门阵列(Field-Programmable Gate Array,FPGA)实现。
在进行FPGA中实现时,首先设计乘法器,分别计算xeyi、yexi的值。直接使用FPGA 自带的IP 核(Intellectual Property,是一种预先设计好的具有某种确定功能的集成电路、器件或部件模块),可以完成乘法器设计。通用LPM_MULT(参数化的乘法器模块),很容易实现系统所需要的乘法运算。类似地,LPM 也有加减速模块LPM_ADD_SUB,调用此模块库,可实现加减法功能。因而,通过调用这些IP 核,可以实现Fi计算。在实现了Fi的计算之后,将利用最小偏差法的算法规则计算插补运算的运动控制,判断逻辑很简单,在FPGA 中易于实现。图6 为在Modelsim(FPGA/ASIC设计的首选仿真软件)中仿真的直线插补波形。

图6 Modelsim中仿真直线插补波形
经过常规实践的演示和验证,不但能够使学生对晦涩难懂的理论知识有一个直观的认识,还可通过将理论运用于实践,激发学生的学习热情。
除此之外,由于该运动控制教学平台是对实际工业场景中的分拣平台的模拟,故而能够很好地对相关工业场景进行再现,使学生对典型的运动控制场景有一个直观感性的认识,让他们了解自己所学的知识在实际工程中的应用,在激发学生兴趣的同时充分调动他们的学习热情。
3.2 运动控制创新实践
运动控制创新实践是在运动控制常规实践基础上的拓展与递进,主要分为相关的课程设计和学生的毕业设计。由于该教学平台是基于ARM +PCL6045B 架构实现的,现阶段已实现的皆为基本功能,所以还有很大的开发改进空间。除此之外,不同于直接购买的教学平台,该运动控制教学平台还将相关的底层软硬件开放,保留了相关的扩展接口,很适合在基本架构的基础上进行进一步的开发。
3.2.1 课程设计类创新实践
一般来说,前期理论学习主要看重的是学生对知识理解的深度,不太注重相关课程之间的联系,进而导致学生学到了知识却不知道这些零碎的知识之间有何联系,更不知道如何在一个完整的体系中将这些知识有机地结合在一起。有些动手能力较强的学生也苦于条件有限,不能将创新性的想法付诸实践。为此,可将该运动控制教学平台用于课程设计类创新实践,帮助学生在学习了理论知识的基础上,充分地发挥自己的创造性,将所学知识有机地结合起来。这不但能够帮助学生建立完整的知识体系,还能够帮助学生将理论与实践相结合,真正做到学以致用。课程设计类创新实践是对常规实践的进一步提升和拓展。对于课程设计类创新实验,主要用于所有相关课程结束后,学生充分锻炼自己的实践能力、创新能力以及综合能力,学生可针对自己感兴趣的模块,对整个运动控制系统进行创新性的拓展,使其结构更加完整,功能更加丰富。
在具体的实践中,针对综合课程设计课程,设计了一套融合视觉检测的运动控制系统。该系统通过视觉检测算法实现对移动目标的实时检测,并根据相关的检测结果,设计对应的运动控制策略,针对移动目标的不同运动情况,分别调用单轴控制、直线差补控制以及圆弧插补控制实现对移动目标的追踪,并在追踪到移动目标的同时实现对移动目标的抓取。整个系统的结构如图7 所示。
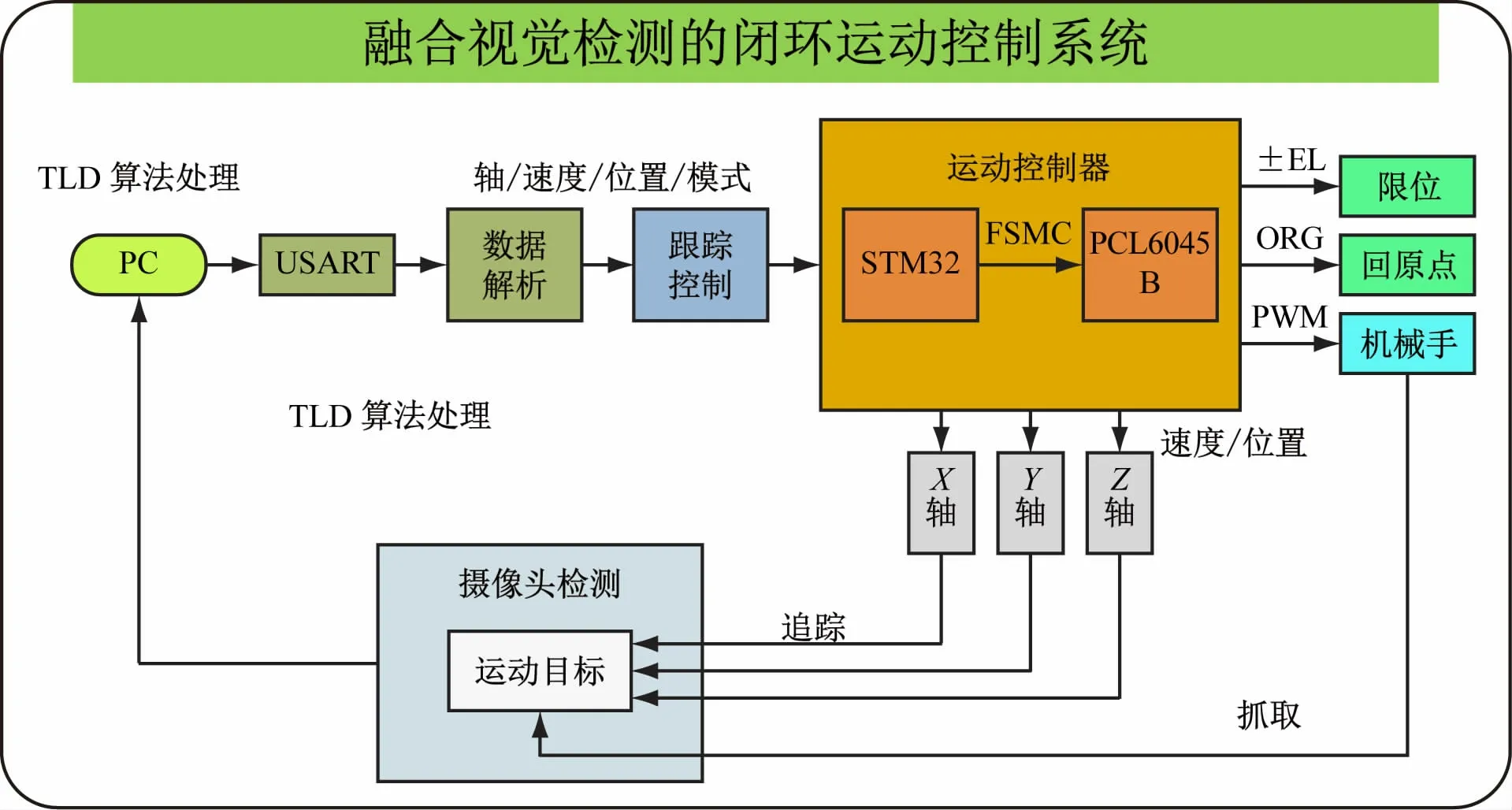
图7 融合视觉检测的运动控制系统的结构
具体来说,针对该系统设计了4 种任务,包括对静止目标的定位和抓取、普通场景下对移动目标的跟踪抓取、有其他运动物体干扰时对移动目标的追踪抓取、有障碍物遮挡情况下对移动目标的追踪抓取。4 组同学参与了此次教学实践任务,每组2 名同学。在1 名硕士研究生的带领下,4 组同学顺利完成了预设的任务。这里仅针对有障碍物遮挡的情形,给出简单介绍。图8 所示即为发生内部遮挡情况下,整个运动控制系统实现对移动目标的追踪抓取,该运动控制系统可以有效应对发生外部遮挡以及内部遮挡的情况,实现对不同外部特征的移动目标的追踪抓取。图8(a)中是视觉反馈检测到的移动目标的完整运动轨迹;图8(b)是移动目标发生内部遮挡重新出现后,运动控制平台对其进行准确地追踪抓取的结果。从图中的结果可见,移动目标运动到障碍物下方时会出现遮挡,但当移动目标继续运动,重新出现在视觉检测范围内时,整个运动控制系统会重新检测出移动目标,并控制各轴重新对移动目标进行追踪,不会丢失对移动目标的检测追踪。

图8 融合视觉检测运动控制系统发生内部遮挡情景下的结果
此外,仿照此系统,有余力的学生可以根据自己感兴趣的方向对基本的运动控制平台进行进一步的设计和改进,在充分锻炼自己各方面能力的同时做到真正的学以致用。比如,现阶段平台的已控轴为空间垂直的3 个轴向,可在此基础上进一步增加旋转轴,来实现更加丰富、更加灵活、更加贴近实际应用的功能。
在扭矩限制器装配完成后,要求将联轴器装在标定设备上进行标定,如果标定过程中发现实际打滑扭矩与要求值偏差超出允许范围,需要重新调整螺栓的上紧扭矩。
课程设计类创新实验适宜安排在大三下学期或大四上学期,此时学生已经学完了相关的专业课程,对各门课程相关知识都有了一个较为全面的了解,可针对自己感兴趣的方向,对平台进行拓展,充分锻炼自身各方面的能力。整个运动控制课程设计以小组为单位,不同成员负责不同任务,并在此基础上彼此协作,共同完成整个课程设计。这不但有利于学生理论结合实践、学以致用,锻炼团队合作意识,还能够帮助他们在进一步深造或就业过程中赢得先机。
3.2.2 毕业设计类创新实践
除了课程设计外,进一步还可以通过学生的毕业设计来进行创新性实践。相对于课程设计类创新实践,毕业设计类创新实践对学生各方面的能力有更高的要求。毕业设计类的创新实践一般要求学生从系统的角度出发,对整个运动控制平台有一个完整的认识,而不是仅针对某个模块进行设计或拓展。学生需要在了解整个系统架构的基础上,进一步对整个系统的各个模块进行拓展,实现一个完整的系统设计。
考虑到此类实践的复杂性,可在进行过程中,以学生为主体,并在此基础上安排研究生对其进行指导,即在充分调动学生积极性的基础上适当给予一定的指导,使其能够在锻炼自身解决复杂问题能力、应用实践能力的同时将所学知识充分地融会贯通。针对此类创新实践,2016 年12 月~2017 年6 月,利用此平台指导1 名本科毕业生完成了题为基于四轴运动控制平台的目标检测与跟踪的论文。该论文以ARM 为主控制器,配合专用运动控制芯片PCL6045B,实现直线和圆弧插补运动控制;在HSV 颜色空间下,采用基于颜色的方法建立静止目标检测的数学模型,在VS2015 加OpenCV的开发环境下实现检测算法,并进行相机标定。最后在四轴运动控制平台上结合两者实现目标的跟踪。
通过多元化的实践教学体系,将各个实践教学环节紧密结合、自然衔接,在理论知识的基础上,进行实践操作,进一步通过实践来对学生的综合能力进行提升。
4 结 语
猜你喜欢
少儿美术(2019年1期)2019-12-14
幼儿100(2019年26期)2019-09-10
小学生导刊(2018年13期)2018-11-30
小学生导刊(低年级)(2017年2期)2017-06-10
中小学电教(2016年3期)2016-03-01
新高考·高二数学(2014年7期)2014-09-18
终身教育研究(2014年1期)2014-02-28
中学英语之友·上(2008年2期)2008-04-01
中学英语之友·上(2008年2期)2008-04-01
中学英语之友·上(2008年1期)2008-03-20
