一级倒立摆控制方法比较研究
2020-09-15 16:30马朝阳华云松周磊
计算机时代 2020年8期
关键词:模糊PID
马朝阳 华云松 周磊
摘要:为了对倒立擺进行准确快速的控制,根据牛顿力学原理建立一级倒立摆的数学模型,并运用MATLAB对该系统的性能进行分析。运用模糊控制理论设计基于融合函数的模糊控制器、串联模糊控制器和模糊PID控制器,并在MATLAB上建立SIMULINK仿真模型进行模拟仿真,最后对设计的三种控制器的控制效果进行分析比较。仿真结果表明:对于一级倒立摆,基于融合函数的模糊控制器和串联模糊控制器分别能在2.5秒和2秒内使倒立摆稳定,而模糊PID的控制方法会使倒立摆在1秒内实现稳定,明显优于其他两种方法。
关键词:一级倒立摆;融合函数;模糊控制器;模糊PID
中图分类号:TP13 文献标识码:A 文章编号:1006-8228(2020)08-01 -05
0引言
倒立摆系统成本低,结构简单,并且能够反映被控系统的镇定性等性能参数,因此倒立摆系统的研究在控制领域方面着发挥着十分重要的意义[1-2]。
研究设计三种模糊控制器,建立仿真模型,通过调节参数,对倒立摆进行仿真控制,然后分析比较这几种控制器的控制效果。
1 数学建模与性能分析
1.1 建立数学模型
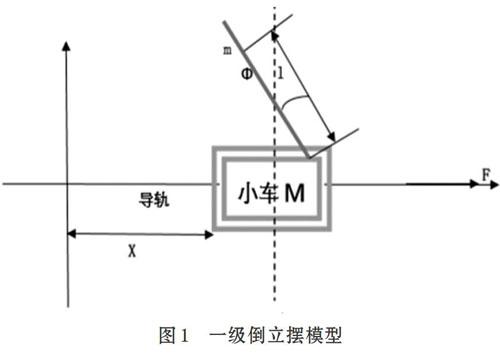
一级倒立摆忽略空气阻力和各种摩擦后,可抽象成小车和匀质杆组成的系统[3],如图l所示。
图1中M为小车质量,m为摆杆质量,l为摆杆转动轴心到杆质心的长度,F为加在小车上的力,x为小车位置,φ为摆杆与垂直向上方向的夹角,图2中6为小车摩擦系数,图3中I为摆杆惯量,θ表示摆杆与垂直向下方夹角(摆杆初始位置向下)。其中,N和P为小车与摆杆相互作用力的水平方向和垂直方向的分量。
对小车水平方向所受合力进行分析得到:
对摆杆水平方向的受力进行分析可以得到:
把式(2)代入式(l),就得到第一个运动方程:
对摆杆垂直方向上的合力进行分析可以得到:
设θ=π+φ(φ是摆杆与垂直向上方向之间夹角),假设φ与1(单位是弧度)相比很小,即φ<<1,则可以进行近似地处理为:cos θ=-1,sinθ=○,θ=0。
用a来代表被控对象的输入力F,线性化后,两个运动方程如下:
由文献[4]知小车质量M=l.096Kg,摆杆质量m=0.109Kg,小车摩擦系数b=0.1N/m/sec,摆杆转动轴心到杆质心的长度1=0.25m.摆杆惯量I=0.0034kg*m*m,将参数代入式(9),可得以小车加速度作为输入的系统状态方程:
1.2 系统稳定性、能控性分析
稳定性就是指偏离平衡状态的受扰运动能否只依靠系统内部的结构因素而返回到平衡状态,或限制在它的一个有限邻域内[5]。
利用MATLAB调用函数eig(A),来求解系统的极点,结果如图4所示,可知此系统不稳定。
通过MATLAB命令ctrb(A,B)可以得到可控性矩阵,结果如图5所示,能控性矩阵满秩,所以一级倒立摆系统是完全能控的。
2 控制器设计
2.1 基于融合函数的模糊控制器
将融合技术与模糊控制相结合,分别把状态变量位移x和角度φ,速度x和角速度φ通过融合函数融合成偏差E和偏差变化率EC,然后通过调节比例因子和量化因子,实现倒立摆的稳定。模糊控制器结构图如图6所示。
取误差E和误差变化率EC的论域分别是X=[-6,6],Y=[-6,6],输出论域为2=[-6,6]。取模糊子集为NB,NM,NS,ZE,PS,PM,PB。输入输出模糊子集相同。根据输入输出论域上的模糊语言变量划分,可以设计模糊规则表见表l。
在MATLAB里建立仿真模型,如图7所示。
2.2 串联模糊控制器
将小车位置和速度作为位置模糊控制器的输入,将输出乘以一个广义角与小车角度一起作为角度和角速度当作角度模糊控制器的输入,系统控制力作为输出量,以此构成一个串联模糊控制器来控制倒立摆[6-8]。
首先建立位置模糊控制器规则,把小车位置和位置变化率即速度划分为7个等级级即NB,NM,NS,ZE,PS,PM,PB,并取模糊论域为[-6,6]。位置模糊控制器规则见表2。
建立角度模糊控制器,把小车角度和角度变化率即角速度也划分为同样的7个等级即NB,NM,NS,ZE,PS,PM,PB,并取模糊论域[-6,6]。角度模糊控制器规则见表3。
在MATLAB里建立仿真模型,如图8所示。
2.3 模糊PID控制器
以传统PID控制器作为基础,把偏差作为PID控制部分的输入[9],把偏差和偏差变化率当作模糊控制部分的输入,然后将模糊控制部分的三个输出AKp、AKi、△Kd相对应与PID控制部分的输出进行相加后,利用综合结果对被控对象进行控制。模糊PID控制器的结构图如图9所示。
为了控制PID控制器的三个参数,要设计三个模糊控制器输出对PID参数调整[10]。由于偏差较大时,适合选取较大的Kp和较小的Kd,可使系统响应加快,为防止超调较大可限制积分作用;偏差较小时,适合选用较大的Kp和Ki,可改善系统稳态性能[11];偏差介于这两者之间时应用较小的Kd,减小系统超调。由此得到模糊规则,见表4、表5、表6。
3 仿真实验
为了比较设计的三种控制的控制效果,此部分对控制器进行仿真实验。
3.1 基于融合函数的模糊控制器实验
设初始状态为[0.0l;0;0;0],状态方程设置为A=[O1 0 0;0 0 0 0;0 0 0 1;0 0 29.4 0],B=[0;l;0;3],C=[1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1],D=[0;0;0;0]。设置好以上参数后,对两化因子Ke、Kec和比例因子Ku进行调整。
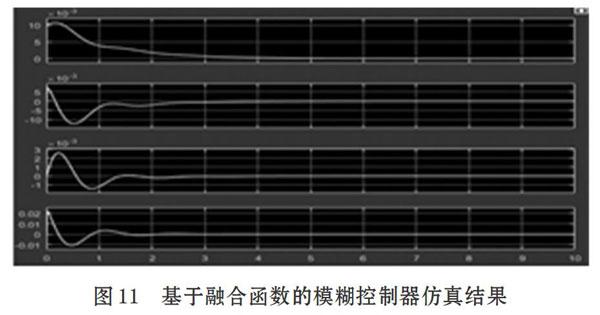
经过实验验证,确定当Ke=15,Kec=20,Ku=5时,基于融合函数的模糊控制器控制效果最好,能在2.5秒内使倒立摆稳定,如图ll所示。
3.2 串联模糊控制器实验
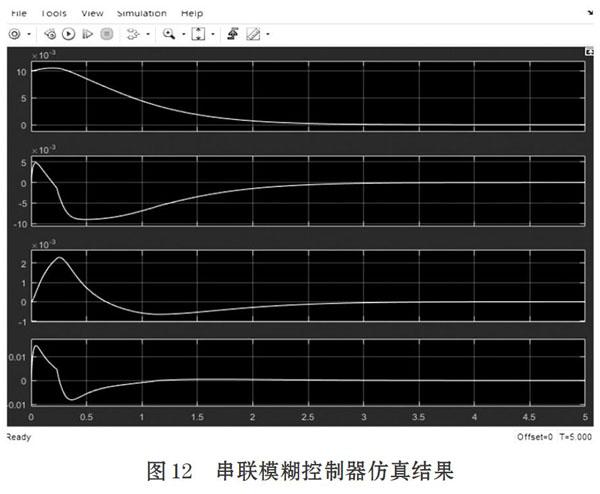
设初始状态为[0.01;0;0;0]。经过实验测试确定当取KEl=6, KECl=6, KUl=0.03, KE2=20, KEC2=3,KU2=5,串联模糊控制器仿真效果最好,会在2秒内使系统稳定,如图12所示。
3.3 模糊PID控制器实验
设系统初始状态为[0;0;0.01;0],PID控制器的初始值Kp=300,Ki=600,Kd=40,初始值Ke=0.075,Kec=0.6,△Kp、△Ki、△Kd的初始值为0.067、0.01、0.5。
经实验测试当取Kp=-300,Ki=-100,Kd=-50时模糊PID控制效果最好,可以在1秒内使倒立摆的稳定,如图13所示。
4 结束语
本研究对设计的三种控制器进行仿真测试,仿真结果表明,这三种方法都能使倒立摆稳定,但是基于融合函数的模糊控制器的控制效果最差,能在2.5秒内使倒立摆稳定;串联模糊控制器次之,能在2秒内使倒立摆稳定;模糊PID控制器的控制效果明顯比其他两种控制器优秀,能在1秒内使倒立摆稳定。
对于倒立摆的稳定控制研究,可以将其应用到机器人行走中。由于本研究中的参数都需要手动测试调节,所以后面进一步研究参数自适应,使其能够适应于更多场合。
参考文献(References):
[1]XIU-LING ZHNAG, HONG-MIN FAN, JIA-YIN ZANGet aI.Nonlinear control of triple inverted pendulumbasedonGA-PIDNN[J]. NolinerDyn, 2015.79: 1185-1194
[2]邹忱忱.基于粒子群算法的LQR直线二级倒立摆的控制研究[D].西安科技大学,2017:5-13
[3]魏胜男.一级直线倒立摆的模糊控制方法[D].太原科技大学,2012:4-9
[4]李琳.一级倒立摆的双回路PID控制[J].科技创新导报,2012.32:75
[5]宋丽蓉,邢灿华.现代控制理论[M].中国电力出版社,2015.
[6]安新雨,张涛.一级直线倒立摆串联模糊控制方法研究[J].科技信息,2015.2(6):48-51
[7]陈华.单级倒立摆智能控制器设计[J].重庆工学院学报(自然科学),2009.23(1):98-101
[8] GELU-OVIDIU TIRIAN, OCTAVIAN PROSTEAM, IOANFILIP.Inverted pendulum controlled through fuzzy logic[C].Romania,2015.34:85-90
[9]黎君,阎世良.一级倒立摆模糊PID控制器设计[J].研究与开发,2012.31(4):50-52
[10]武彬,张奕英.模糊自整定PID控制在主汽温控制中的应用[J].计算机仿真,2015.2: 395-396
[11]楚清河,李卫华.基于模糊自适应PID技术的历次控制器研究[J].机械制造与自动化.2013.12(2):160-162
作者简介:马朝阳(1995-),男,江苏徐州市人,硕士研究生,主要研究方向:机器视觉、机器人控制。
通讯作者:华云松(197卜),男,上海人,副教授,主要研究方向:自动测量与检测技术。
猜你喜欢
山东工业技术(2017年19期)2017-09-27
大陆桥视野·下(2017年7期)2017-09-05
科技创新与应用(2017年16期)2017-06-10
科技创新与应用(2017年16期)2017-06-10
电脑知识与技术(2016年29期)2017-04-27
中国新通信(2017年3期)2017-03-11
科技视界(2016年23期)2016-11-04
科技视界(2016年5期)2016-02-22
现代电子技术(2015年11期)2015-07-28
现代电子技术(2015年8期)2015-07-09