
基于粒子群算法的CFB机组协调系统模型辨识
2020-10-09 02:55白建云
自动化与仪表 2020年9期
白建云,邵 茹
(山西大学 自动化与软件学院,太原030013)
随着新能源发电在电网占比的逐年增加,火力发电的地位因此面临着变化,由之前提供电能的主体性电源向提供可靠电力和辅助电网调峰调频的基础性电源转变。由于供给侧跟需求侧双侧均具有间歇性,电网日负荷高峰与低谷差增大,这就对火电机组提出了调峰调频的要求,以维持电网的稳定。机组在AGC/ACE 模式下,电网通过Kp 值对机组进行考核并作出相应的补偿,这就需要火电机组拥有快速的负荷响应速度和控制效果,从而获得更高的经济效益[1]。
机炉协调控制系统是机组AGC 模式下的核心,其通过锅炉主控跟汽轮机主控,使锅炉跟汽轮机的动态特性与负荷要求相匹配,锅炉确定相应的给煤量、给水量、一次风量、二次风量,汽轮机高压缸进汽调门开度产生相应的变化,共同满足电网对机组负荷的需求。对多输入多输出系统进行模型辨识的传统方法是系统在开环状态下,将阶跃扰动加在其中一个调节量上,通过观察每个被控量产生的变化从而得到该调节量到每个被控量通道的传递函数[2]。这种方法对现场条件有很高的要求,不易于实施。本文采用标准粒子群智能算法对某电厂超临界350 MW 循环流化床机组协调系统进行闭环辨识,并且证实了该算法建模的可行性。
1 协调控制系统介绍
1.1 被控对象介绍
在协调控制系统中,有功功率是机组的外部参数,对其要求是能够尽快与电网调度指令相一致。主蒸汽压力是机组的内部参数,衡量着锅炉侧产生合格的蒸汽量与进入汽轮机做功的蒸汽量之间是否平衡及机组的蓄热能力。对主蒸汽压力的要求是当机组负荷稳定时,主蒸汽压力也保持稳定;当机组负荷跟踪目标负荷时,主蒸汽压力在给定值附近允许的范围内波动[3]。
单元机组协调控制系统是很具有代表性的多变量系统。其中,总给煤量u1和汽轮机高调门开度u2分别是系统的两个输入,有功功率y1与主蒸汽压力y2分别是系统的两个输出。被控对象的系统结构如图1所示。

图1 协调控制系统结构Fig.1 Coordination control system structure
该系统可用式(1)所示的传递函数矩阵来表示:

1.2 被控对象动态特性
锅炉燃料量μB、汽轮机高调门开度μT阶跃扰动下协调控制系统被控对象的动态特性如图2所示。
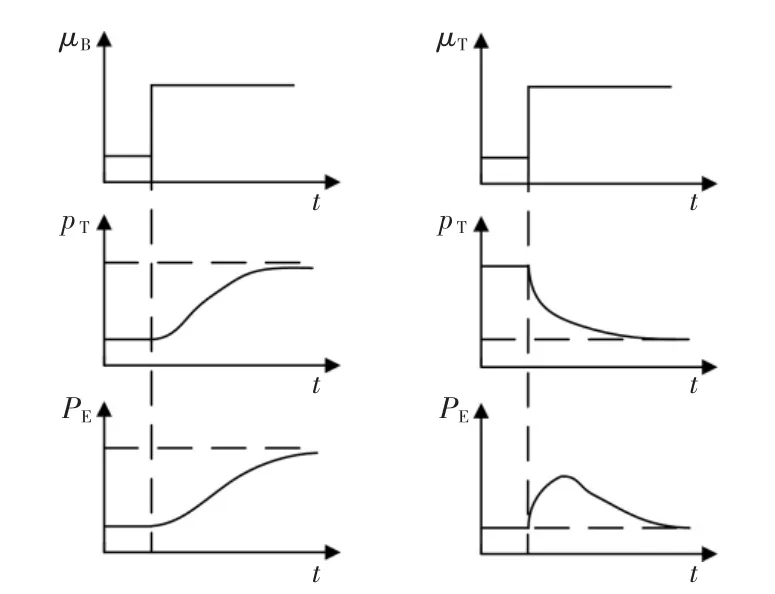
图2 协调控制系统被控对象的动态特性Fig.2 Dynamic characteristics of controlled object of coordinated control system
1.2.1 锅炉燃料量阶跃扰动下的动态特性
当给煤量阶跃增加时,布置在炉膛与尾部烟道的受热面吸收的热量增加,主蒸汽压力经过一定时间的迟延之后逐渐升高[4-6]。由于汽轮机高压缸进汽调门开度保持不变,蒸汽流量因此增加,带来有功功率增加的同时限制主蒸汽压力的继续提高。当蒸汽流量与给煤量达到动态平衡时,主蒸汽压力与机组实发功率稳定在较高水平。
1.2.2 汽轮机高调门开度扰动下的动态特性
当汽轮机高调门开度阶跃增加时,蒸汽流量立刻增加,从而带来机组出力的增加,与此同时主蒸汽压力立刻下降。由于燃料量并未增加,因而蒸发量保持不变,机组出力增加的原因是释放出来的一部分锅炉蓄热。最终,主蒸汽压力将稳定在一个较低水平,实发功率也会恢复到汽轮机进汽调门开度扰动之前的数值。
根据对系统被控对象动态特性的分析,可以看出从燃料量改变到主蒸汽压力和机组实发功率变化的过程响应时间均很慢;但是当汽轮机高调门开度变化时,主蒸汽压力跟机组实发功率的变化是很快的。因此,当机组负荷跟随AGC 指令变化时,如果仅仅依靠锅炉侧通过调节给煤量来调节有功功率的话,就不能获得快速的负荷响应速度。相反,如果仅仅依靠汽轮机侧通过调节高调门开度来调节有功功率的话,虽然负荷响应速度很快,但是由于锅炉侧燃料量的增加不能及时带来蒸发量的变化,会造成主蒸汽压力产生较大程度的波动。因此,在负荷变化时,可以通过适当的调节汽轮机高调门开度,提高负荷响应速度。同时,锅炉侧通过改变给煤量满足负荷的变化,使锅炉侧跟汽轮机侧能量供需相匹配。当锅炉侧控制器入口检测到主蒸汽压力偏差过大,就会向汽轮机侧控制器发出指令,限制高调门的进一步开大,保证机组安全运行。这就是机组协调控制的根本原则。
2 机炉协调控制系统模型辨识
2.1 粒子群算法原理介绍
基本粒子群算法中粒子速度更新公式为

式中:i=1,2,…,m;j=1,2,…,N;t 为当前位置时刻;t+Δt 为下一时刻;r1(r2)=rand(0,1);c1,c2为粒子向自身最优值与全局最优值靠近的权值。
标准粒子群算法中粒子速度更新公式是在式(2)的基础上引入惯性权重ω,即:

惯性权重ω 代表着粒子当前时刻的速度在下一时刻所占的比例[7]。ω 值较大,代表着全局搜索能力较强;ω 值较小,代表着局部搜索能力较强。因此,一般采用惯性权重递减的策略,起初选取较大的ω值,以增强搜索速度,后期起初选取较小的ω 值,有利于算法的收敛[8]。
惯性权重递减公式为

式中:ωmin,ωmax是惯性权重的最小与最大值;Tmax为迭代次数;t 为当前已走过的步数。
标准PSO 算法流程如图3所示。
2.2 系统辨识原理
对MIMO 系统进行辨识跟SISO 系统辨识的实质相同,辨识方法都是依据电厂运行过程中系统的输入输出数据,寻找目标函数达到最小值时所对应的数学模型,此时数学模型与系统特性等价[9-10]。
对于图4 有r 个输入q 个输出的MIMO 系统,就需要建立r×q 个传递函数表达r 个输入与q 个输出之间的对应关系[11-12]。对机组协调系统进行模型辨识的关键在于辨识出两输入两输出系统的W11(s)、W12(s)、W21(s)和W22(s)这4 个传递函数。

图3 标准PSO 算法流程Fig.3 Flow chart of standard PSO algorithm

图4 r 个输入q 个输出的MIMO 系统Fig.4 MIMO system with r inputs and q outputs
对MIMO 系统进行模型辨识时,选取目标函数为

式中:q 为输出变量个数;m 为采样点数;Ts为采样周期;γl为各个输出在目标函数中所占的比例,它是为了平衡每个输出在目标函数中所占的比例。
然而,大多数情况下,各输出的幅值相差较大,并不在同一个数量级上,很难确定合适的γl[13]。这时就需要对每个输出分别进行辨识,此时选取目标函数为

系统辨识的方法是根据采集到的输入输出数据,运用辨识方法对参数进行寻优,确定一种跟实际系统特性一致的模型[14]。首先根据系统的动态特性,选择适合的估计模型,接下来将输入分别施加到待辨识系统跟估计模型上,计算得到两个输出的差值,优化算法根据差值对估计模型参数进行优化,待辨识系统跟估计模型的输出差达到最小时,表明估计模型能最好地接近实际过程的输出,此时的估计模型就是辨识出来的系统模型。这一过程可用图5 来表示。

图5 系统辨识结构图Fig.5 System identification structure
2.3 辨识数据筛选
从山西某电厂350 M W 循环流化床机组采集2020年3月1日至3月2日机炉协调系统的历史数据,采样周期为10 s,共计8641 个数据点,机炉协调系统历史数据为图6所示。

图6 机炉协调系统历史数据Fig.6 Historical data of boiler turbine coordination system
用于模型辨识的数据应采用从一个稳定工况开始终止于另一稳定状态,通过对历史数据的分析,选择57000 s~72000 s 时间段的数据共计1500个数据作为辨识数据,并对数据进行零初始值处理。图7 为零初始值处理后的模型辨识所用数据曲线。
2.4 估计模型的选择
模型结构的选择需要以对被辨识系统的认识为基础,使模型可以准确地反应控制系统的特性。估计模型的选择是模型辨识过程中至关重要的一步,它直接决定着辨识结果的可用性与准确性。数学模型与系统之间并不是一一对应的关系,因此,在选择模型结构时,只需要选择适合的即可[15-16]。根据文章前半部分对系统被控对象动态特性的分析,四个通道传递函数均选择为带有纯迟延的高阶惯性环节。

图7 零初始值处理后的辨识数据曲线Fig.7 Identification data curve after zero initial value processing

2.5 系统辨识
观察图7,发现有功功率与主蒸汽压力两个输出的幅值相差很大,不在同一个数量级上,因此选择式(6)作为目标函数,对两个输出分别进行辨识。
根据图6 历史数据曲线中输入与输出幅值的比较以及对350 MW 循环流化床机组协调系统特性的了解,选取一组较大的初始参数区间进行辨识。当得到一组辨识参数之后,观察实测数据与辨识结果曲线是否达到了可接受的误差范围之内。一般情况下,第一次辨识的结果达不到所希望的要求,此时,对已经到达区间边界的参数区间进行扩大、调整,再次进行辨识,直到得到一组令人可以接受的参数。在多次辨识之后,辨识参数区间选择如下:
K(1~4)∈[0.1 0.1 0 -1]~[2 2 1 -0.01]
T(1~4)∈[100 500 100 10]~[300 1500 500 100]
n(1~4)∈[2 2 2 2]~[4 4 4 4]
τ(1~4)∈[50 50 10 10]~[200 200 100 200]
采用标准PSO 算法对模型参数进行寻优,粒子个数M=60,进化代数S=80,遗忘因子ω∈[0.8 1.2],学习因子c=[1.2 1.2]。利用标准PSO 算法进行寻优时,由于粒子速度更新公式与初始化种群位置都是不确定的,因而每运行一次程序结果都不会完全一致,经过多次运行程序,选取一组较好的运行结果。该系统的辨识结果如图8所示,各通道的传递函数见表1。

表1 传递函数模型表Tab.1 Transfer function model
从辨识结果来看,辨识的结果较好,要对协调系统进行控制还需要对所辨识的模型进一步验证,验证辨识结果是否与系统特性相一致。
2.6 模型验证
选取其他时间段的900 组采样数据作为模型验证数据,证实利用标准PSO 算法对多变量系统建模的准确性。从图9 中可以看出,模型输出与系统实际输出的曲线拟合的结果较好,达到了令人接受的程度,证实了利用标准PSO 算法对多变量系统建模的准确性与可靠性。
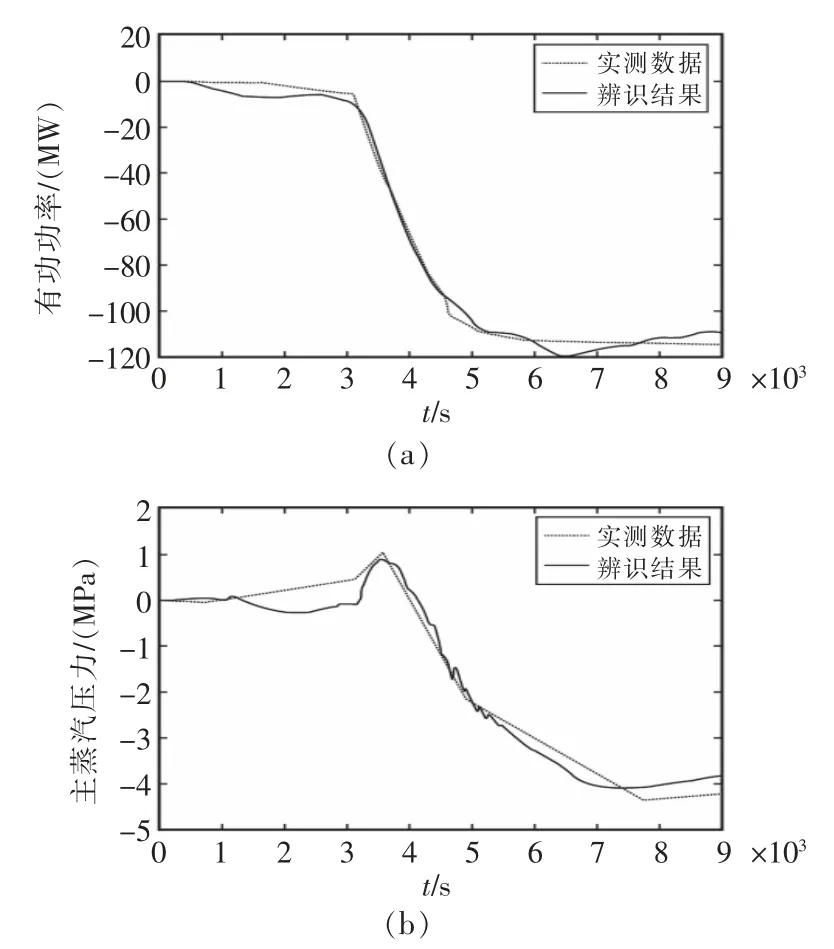
图9 模型验证结果Fig.9 Model validation results
3 结语
为了更好地消纳风光等新能源,火电机组在运行时必须进行深度调峰,这就要求机组在保证安全的前提下具有较好的负荷响应能力。对多变量系统进行模型的建立是对其进行控制的前提。本文利用标准PSO 智能算法对山西某电厂350 MW 循环流化床机组机炉协调系统进行模型辨识,得到总给煤量-有功功率、高调门开度-有功功率、总给煤量-主蒸汽压力、高调门开度-主蒸汽压力四个通道的传递函数。对辨识结果进行验证之后,证实了利用标准PSO 算法对多变量系统建模的准确性。本文所建立的协调系统模型对之后进行机炉协调控制方案的设计及改进提供了模型基础。
猜你喜欢
能源工程(2021年6期)2022-01-06
能源工程(2021年3期)2021-08-05
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
发电技术(2020年3期)2020-06-29
人民交通(2020年2期)2020-04-16
电子制作(2019年22期)2020-01-14
戏剧之家(2018年21期)2018-10-19
中国核电(2017年1期)2017-05-17
军事文摘·科学少年(2017年1期)2017-04-26
