模块化自动升降式深海网箱设计与仿真
2020-11-25 03:53谭永明楼上游袁世鹏楚树坡王志勇谌志新
农业机械学报 2020年11期
谭永明 楼上游 袁世鹏 楚树坡 王志勇 谌志新
(1.机械科学研究总院机科发展科技股份有限公司, 北京 100044; 2.青岛海洋科学与技术试点国家实验室, 青岛 266237;3.中国水产科学研究院渔业机械仪器研究所, 上海 200092)
0 引言
从20世纪80年代起,海水网箱得到迅速发展。初期多采用结构简单、基于HDPE材料的圆形浮式网箱[1]。这种小型网箱造价低、制作简单、维护方便,但受材料性能和网箱结构限制,周长一般小于80 m,只能用于近海作业。这种普通型网箱不能实现升降、抗风暴能力差,在遭遇台风时往往受到毁灭性破坏,导致鱼类大量死亡或逃走,给养殖户造成不可弥补的损失。网箱养殖以散户个体养殖模式为主,由于养殖分散程度高、养殖方式粗放、附加值低和污染高等,导致养殖海域海水质量急剧下降,海域的自修复平衡受到破坏,造成近海的一些养殖海域短期内不再适合人工养殖。
随着国家海洋强国、走向深蓝战略的推进,海水养殖不断向经略海洋的大目标迈进,养殖方式也由以前的散户小规模走向大规模集中养殖、由浅海养殖走向深远海养殖、由简单化养殖走向科技含量更高的智能自动化养殖,网箱也向大型及超大型深水智能化方向发展[2-3]。为了适应集中化大型养殖业的发展,网箱自动化技术得到快速发展。网箱开始采用计算机远程控制的投料系统,实现了自动投饵及投饵量校正[4-8]。同时,远程海况、水温、水质监控和预警,以及自动网衣清洗、网箱自动升降起渔等配套新技术都得到研究和应用[9]。在大型深海网箱养殖方面,挪威一直处于世界领先水平。2018年采用挪威技术的半潜式超大型“深海智能渔场”建造完成,投入南海试用。该智能渔场由挪威和中船重工武船集团海工装备研究院设计建造,直径110 m、高75 m、养殖水体2.5×105m3,采用无人遥控养殖和鱼饲料存储与投放、活鱼捕捞、死鱼收集、网衣清洗、平台监控等多项自动化控制技术,还配备了自动发电装置,成为国内“深海养殖的航母”,极大地带动了大型和超大型深海升降网箱的发展。
近10年来,中国现代养殖中海产品产量占比都低于2%,海水养殖水平显著落后。全国普通网箱有100余万只,其中深水网箱仅有6 000余只。由于缺少研发资金投入和规模化的专业研发团队等,我国深海网箱研发仍停留在初级阶段。
按照工作水层,网箱可分为3类:浮式网箱、沉式网箱和升降式网箱[10]。目前主要使用HDPE柔性浮式网箱。这种网箱适用于水深15 m左右、流速小于1 m/s、海浪最高在5 m左右的半开放海区,但由于容量有限、强度差和抗风浪能力低等,阻碍其向大型化及深海方向发展。
升降式网箱智能化程度高,且成本高,但适应环境性强,操作灵活,能够最大程度地避免灾害带来的养殖损失,具有很大的市场发展潜力。对于养殖企业来说,网箱运输方便、安装灵活、维护简单快捷、抗风浪能力强、价格适宜、可靠性高、网衣变形小,而且多单元养殖降低了传染病风险,转箱和起渔也相对方便,升降可以避免台风对网箱和鱼群的破坏。但由于智能化升降网箱对使用环境要求更高,技术含量高,需求差别大,且多为非标准设计,目前没有一套合理的理论为设计提供技术路径和理论支撑,本文以模块化自动升降式深海网箱为例,阐述模块化自动升降式深海网箱设计的关键技术,为非标准网箱设计提供设计理论和方法。
1 深海网箱结构设计
模块化自动升降式深海网箱采用钢结构和气浮升降设计,从机械结构上提高网箱承载力。通过使用工程管材进行标准模块化设计,可最大程度地实现运输和拼接组装,降低网箱的材料成本、运输成本、安装费用和加工周期,通过拼接实现不同规模网箱的需求,适合深海规模化养殖[11]。另外,深海网箱因体积庞大、离岸较远,自身具备远程观测、智能报警及自动供电等智能化功能,并配备相应的自动投喂、自动洗网和起渔分级等辅助设备。
1.1 深海网箱结构组成
为了降低制作成本和方便加工,传统网箱多采用易于热熔的HDPE材料,多为环形和四边形,以减少结合部位,但限制了网箱的规模和智能升级。模块化自动升降式深海网箱由浮管框架组件、网衣、浮漂、系锚绳索、渔礁锚、拉紧绳索及配重组成,如图1所示。
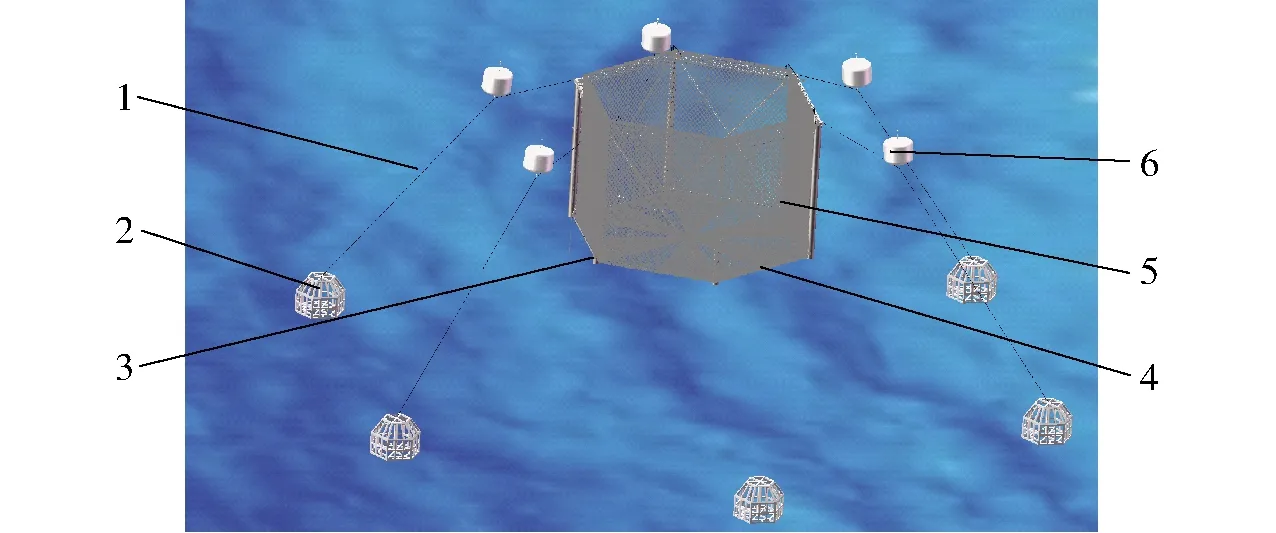
图1 模块化自动升降式深海网箱布置图Fig.1 Layout of modular automatic lifting deep-sea cages1.系锚绳索 2.渔礁锚 3.浮管框架组件 4.拉紧绳索及配重 5.网衣 6.浮漂
网箱的主要组成部件(浮管框架组件)采用统一长度的钢制封闭管材拼装而成,纵向立管根据体积选择多节封闭管拼接,横向浮管根据不同投影面积要求,拼接成不同等边多边形形状,如图2所示。标准设计容积公式为
(1)
式中Vv——网箱容积,m3
n1——纵向立管层数,层
h——立管长度,m
n2——多边形边数,条
a——多边形边长,m

图2 模块化自动升降式深海网箱不同拼接方案Fig.2 Modular automatic lifting deep-sea cage splicing scheme
主要部件标准化可降低制作成本,也为运输和简化现场安装提供了方便,并利于后期维护。网衣可采用高密度强化塑料材质网衣或铜网衣两种,测试用塑料网衣网目边长取75 mm,网线直径为3 mm,拉紧锚采用混凝土渔礁锚,适用于海底为泥沙的海域。
升降深水网箱所有浮管均设有进、出口,通过充气、放气和排水、进水来增减浮力实现网箱升降,升降范围一般为海平面到海面下10~15 m,深海网箱通常在水深40~60 m海域使用。不同于普通网箱,升降网箱借助浮漂张紧,并限制网箱的活动范围。网箱常规状态是横向浮筒半浮于海面,只有海况恶劣时处于下沉状态。网箱受力不仅包括风压及海浪流对线状管材框架的作用力,还包括海流对面状网衣的作用力以及渔礁锚对网箱漂动范围的限制力。网箱在海水中漂浮时,根据受力平衡原理,主要受锚绳牵引力、波浪力、风压载荷力(下沉至指定位置时值为0)、自身重力及浮力[12-14]。在海面漂浮状态下,网箱整体受力(极限载荷计算需要增加活载荷和地震载荷)为
(2)
式中Ti——系锚绳索牵引力,N
Fw——波浪力,N
Wj——自身重力,N
n——系锚绳数量,个
m——重力单元数,个
Ff——浮力,N
WP——风压载荷,N
其中波浪力是网箱在海面上所承受的主要破坏力。刚性管材受力可分为水流冲击力和惯性力[15],网箱需要考虑网衣单独受力,计算公式为
Fw=Fg+Fω=Fxt+Frd+Fh+Fω
(3)
式中Fg——网箱框架受到的波浪力,N
Fω——网衣受到的波浪力,N
Frd——纵向立管受到的水流冲击力,N
Fxt——纵向立管受到的惯性力,N
Fh——横向浮管受到的水流冲击力,N
其中纵向立管受水流冲击力为
(4)
式中ρw——海水密度,取1.02×103kg/m3
CD——海水阻力系数
CM——惯性力系数
ux——管柱轴线处水质点的水平方向速度,m/s
D——管柱直径,m
u′x——垂直于单元中线的合成加速度,m/s2
横向浮管受水流冲击力为
(5)
式中S——垂直于横向浮管轴线上单位长度上的投影面积,m2
U——垂直于浮管轴线方向的水流速度,m/s
V——圆管单位长度的体积,m3
u——海水流速,m/s
将网衣所受波浪力换算为流体运动形成的面阻力,计算公式[16-17]为
(6)
式中Ad——网箱在水流方向的垂直投影面积,m2
其中风压载荷为在海平面以上的网箱所受空气负载,计算公式为
(7)
式中ρa——空气密度,取1.29 kg/m3
v——风速,m/s
Au——受力面积,m2
网箱所受浮力为
Ff=Fk+Fv=ρwgVe
(8)
式中Fk——网箱框架所受浮力,N
Fv——网衣所受浮力,N
g——重力加速度,m/s2
Ve——网箱入水总体积,m3
网箱组成部件重力和系锚绳索牵引力可以通过实测确定。
1.2 网箱升降过程受力计算
升降过程中网箱升降平衡是评价升降效果的一个重要指标,浮起和下降过程需要网箱各边保持平衡,当平衡失控时,会导致网箱倾斜甚至倾覆,箱内养殖鱼受到积压和碰撞会大量死亡。大型HDPE升降网箱因材质柔性大,在风浪中消波能力强,可以跟随波浪起浮[18-19],但在升降过程中更加难以保持平衡,相对于钢架网箱,HDPE网箱各浮筒排水不一致时,网箱倾斜现象更加明显,如图3所示。模块化自动升降式深海网箱使用自身的框架管替代普通网箱的浮筒,升降过程也会遇到此问题,通过进气阀、排气阀和智能气压控制阀来保持各管进气量和进气速度,实时调整保持网箱平衡升降[20-21]。

图3 HDPE网箱升降倾覆现场图Fig.3 Lift overturning scene of HDPE cages
网箱没入海面后的升降平衡方程为
(9)
(10)
式中T′t——重力方向的系锚绳索牵引力,N
F′f——网箱没入海面后的浮力,N
ρt——部件密度,kg/m3
V0——已有空气体积,m3
V′t——充气(或排气)速度,m/s
t——充气(或排气)所用时间,s
2 深海网箱仿真分析
通过以容积1.5×104m3六边拼接框架式升降深水网箱为例,测算在12级台风下不下降和下降至海平面下10 m时网箱的受力情况。
2.1 网箱遭遇风暴时升降状态的仿真分析
不升降时,网箱设计承载风速为35 m/s,最大浪高14 m,周期为7.4 s,海面流速1.92 m/s,网箱底部流速1.3 m/s,重力加速度为9.8 m/s2。在ANSYS中点线建模,框架选用pipe59单元,网线和绳索选用link180,采用等分线网格划分,上部六角点为浮漂绳索固定点,底部网衣为水平放置,对水流阻力影响有限,且仅提供内部拉应力,可以对模型进行简化、受力加载,以及计算节点变形位移、单元应力、应变、结构弯矩[22],如图4~7所示。

图4 网箱建模及受力加载Fig.4 Cage modeling and force

图5 网箱节点位移等值线云图Fig.5 Contour diagram of displacement of nodes
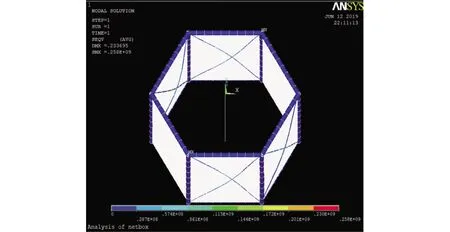
图6 单元应变等值线云图Fig.6 Contour diagram of element displacement

图7 单元应力等值线云图Fig.7 Contour diagram of element stress
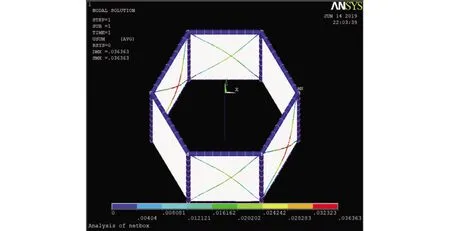
图8 下降10 m时网箱节点位移等值线云图Fig.8 Contour diagram of displacement of nodes
遭遇风暴时网箱上表面下降到海面以下10 m处躲避风载荷和海浪冲击,只承载水流阻力。网箱上部海水流速1.62 m/s,网箱底部海水流速0.96 m/s,网箱节点变形位移和单元应力如图8、9所示。
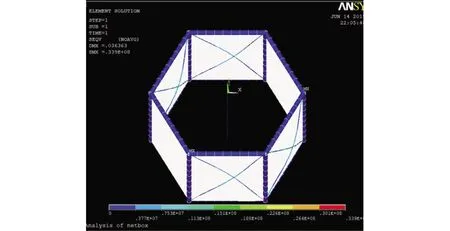
图9 下降10 m时单元应力等值线云图Fig.9 Contour diagram of element stress
对比网箱遭遇12级台风时不升降和降至海面以下10 m处受力及变形,可看出风浪对网箱影响很大,这也是多数浮式网箱不适用于深海养殖的主要原因。不升降的网箱应力极值为2.58×108N/m2,大于Q235的2.35×108N/m2的屈服强度,所以会出现管件应力超出极限,发生断裂造成养殖损失。下降后网箱应力极值为3.39×107N/m2、变形0.036 m,应力为不升降的13%,安全系数核定值为6.9。由于离海面越深的地方海流越趋于平稳,网箱下降后仅存的海流冲击力对网箱影响非常有限。升降式大型网箱比较适合于环境恶劣、台风经常出现的深海海域,如海南马袅湾。框架式深海网箱采用网衣与网箱框架多边固定,网衣在受多重载荷作用下随框架变形,其变形远小于柔性网箱,可为养殖鱼类提供更好的生活空间。
2.2 系锚绳索仿真分析
网箱通过浮漂、系锚绳索和渔礁锚固定,假设系锚端锚绳与水平方向相切,如图10所示,图中ΔSL为锚绳上任一点的渔礁锚与浮漂的水平距离微元尺寸,ΔH为锚绳上任一点的水深微元尺寸。其中单根锚绳的受力[23-24]为
(11)
式中Wf——浮漂重力,N
FL——浮漂浮力,N
Tti——系锚绳索的牵引力,N
WL——锚绳索重力,N
Tm——渔礁锚受力,N
β——锚绳扯拽在水平方向的初始角,(°)
θ——锚绳上任一点的切线与水平方向的夹角,(°)
L——锚绳长度,m
H——海域水深,m
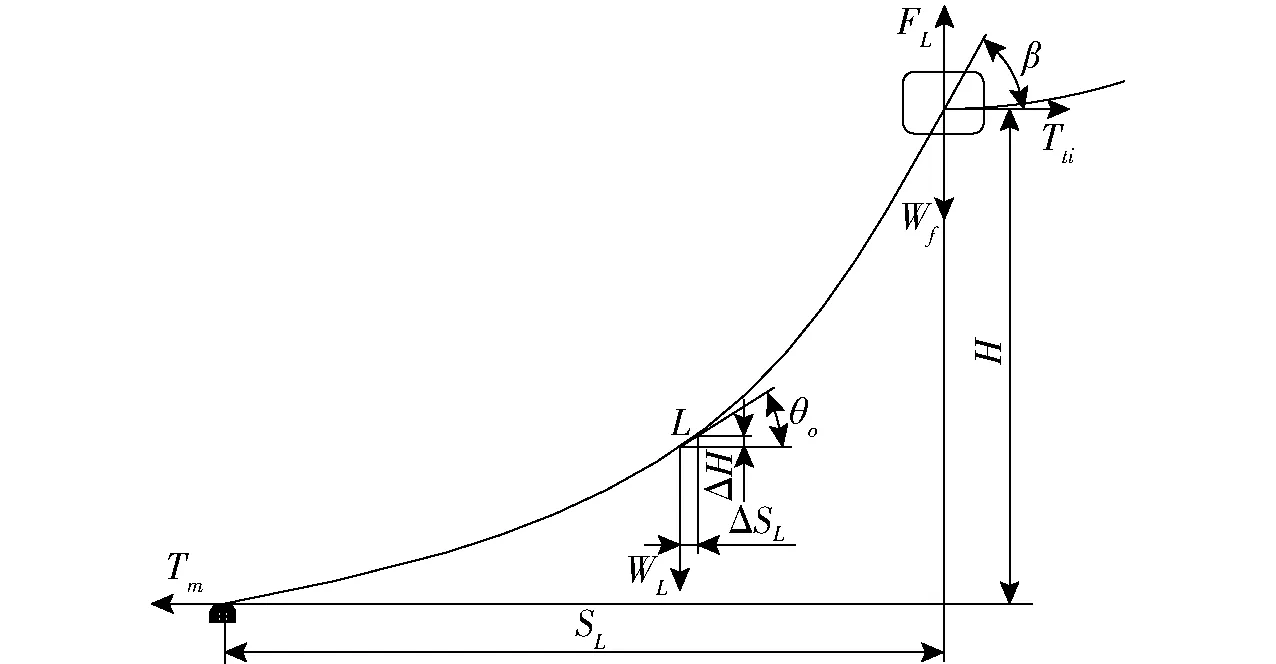
图10 系锚绳索受力分析Fig.10 Stress analysis of anchor rope
锚绳为PP材质,其弹性模量为8.96×108N/m2,泊松比为0.41,安全系数取1.4,抗拉极限强度为1.86×109N/m2,直径为40 mm,浮漂用于保持网箱平衡张紧限位,是连接锚绳和网箱的关键部件,确定后的浮力和重力为定值,锚绳在预应力及设计海况作用下仿真变形分析如图11所示,能够预估最大承载小于安全设计,并且在设计水深网箱综合受力条件下水平单向运动范围在5.4 m左右。

图11 系锚绳索变形分析Fig.11 Anchor rope deformation analysis
2.3 渔礁锚设计与仿真
渔礁锚是在普通石锚基础上增加了渔礁功能,是自动升降深海网箱的重要部件,石锚自身质量为25 t,一方面可固定网箱,另一方面可作渔礁,为野生海洋生物提供10 m3的栖息地。其所受外力为水流静压力、锚绳索牵引力、泥沙阻力和渔礁锚在水中的自身重力[25-26],泥沙阻力根据实际海底沉积情况测定,经测定养殖区的海底层水流流速均值为0.52 m/s,局部水流静压力及流经渔礁的水流速度如图12、13所示。水流在渔礁锚内部和经过渔礁锚后的周边区域的水流静压力和流速(常值为0.257 m/s)减少一半左右,渔礁锚起到很好的阻流作用,有利于野生鱼的生存和繁衍。

图12 渔礁锚水流静压力Fig.12 Hydrostatic pressure of anchor

图13 渔礁锚附近水流速度Fig.13 Water velocity near anchor
2.4 网箱平衡升降系统设计
网箱升降采用从动放气进水(自然进水)方式,反应速度慢,也不利于升降平衡的控制,所以标准化升降网箱采用主动进水将空气顶出的方式。通过横向浮管和纵向立管组成的浮管框架气水交换来完成网箱的升降。控制设备如果放在海水中,很容易受到海水长期腐蚀,也经常伴随海生物的附着破坏,导致网箱需要经常在水下检查及维修,操作困难。 升降网箱时将升降需要的通气装置、通水装置及平衡升降系统尽量多地设置在横向浮管上部,离开水面便于密封及维护。每层纵向立管底部设有水管,上端安装气管,水管和气管管道与水面附近的阀门连接,按照纵向立管层数和所处分网箱角度部位集中放置,并同分级控制装置组成管路系统,如图14所示。
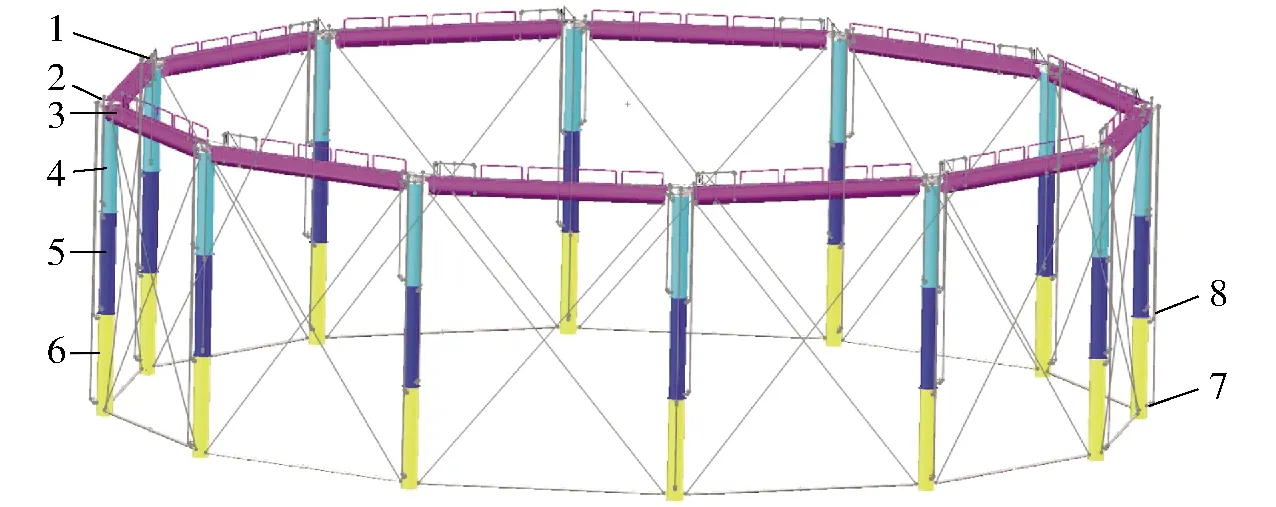
图14 网箱分层控制布置图Fig.14 Cage hierarchical control layout1.管路接口 2.倾角感应器 3.横向浮管 4.第3层纵向立管 5.第2层纵向立管 6.第1层纵向立管 7.第1层水管 8.第1层气管
网箱的平衡升降系统由气泵、水泵、倾角传感器、PLC控制器、执行控制装置和管路系统组成。升降网箱采用多层多节控制,下降时依次从第1层开始注水放气,完成后再进行更高层注水放气,浮力减少,重心逐渐下移,更能保证网箱的平稳下降;网箱上升时次序相反,第1层最后进行排水充气。网箱的平衡升降系统通过不同方向的多个倾角传感器对网箱的平衡状态实时监控,将采集数据提供给PLC控制器,控制器将数据和预设值进行比对,对网箱升降调整提供信息,再由执行控制装置对气泵、水泵和各区域及不同管层的控制阀门发出指令,实现水气的有序交换。平衡升降控制流程如图15所示。

图15 平衡升降控制流程Fig.15 Control process for balanced lifting

图16 模块化自动升降式深海网箱运输和安装现场图Fig.16 Modular automatic lifting deep-sea cage transportation and installation scene
根据设计方案与仿真结果,制作自动升降式深海网箱样机,样机安装现场如图16所示。
3 结论
(1)深海网箱趋向于大型化,其运输、安装及维护是决定网箱市场化程度的关键因素。本文设计了一种智能化、模块化、自动升降式深海网箱,通过对网箱浮管框架组件的标准化设计和采用多边形组合式实现了网箱的标准化和模块化,使网箱的设计、加工、组装及后期维护更加简单实用。
(2)复杂海况和超强风暴是深海网箱使用所面临的最大难题。由于条件限制无法通过仪器进行实际测试验证,本文通过理论计算和仿真分析,得出升降式网箱对深海恶劣环境的适应性远高于普通固定式网箱。在12级台风下,不升降的网箱受力超出材料屈服极限,而下降到海平面10 m以下的网箱受到的最大应力为3.39×107N/m2,安全系数控制在6.9,远大于工程设计要求的安全系数1.4,最大变形仅为0.036 m,网箱移动范围可控制在5.4 m。升降网箱可以大幅度提高抵抗风暴的能力,解决了大型浮式柔性网箱承载能力差、受力变形导致容积变小、容易被台风刮走等问题。渔礁锚作为固定网箱的部件具有很好的阻流作用,同时可为生物提供宜居场所。
(3)设计的主动水气交换的多层多节智能控制平衡升降系统为网箱稳定、可靠、快速、平衡升降提供了支撑,以多个倾角传感器检测实现网箱升降过程中的平衡控制,采用逐层改变网箱重心的方式确保网箱重心维持在低点,实现网箱平稳升降。
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
新农村(浙江)(2022年5期)2022-05-19
渔业现代化(2022年1期)2022-03-10
湖南农业(2021年11期)2022-01-09
建材发展导向(2019年11期)2019-08-24
电子制作(2018年14期)2018-08-21
学苑创造·A版(2017年4期)2017-05-13
学苑创造·A版(2017年5期)2017-05-09
电子制作(2017年24期)2017-02-02
Beijing Review(2015年43期)2015-11-25