
基于单片机的无线遥控智能小车的设计与制作
2021-01-20 08:43李建成王功喆刘春瑞
科学技术创新 2021年1期
李建成 王功喆 刘春瑞
(潍坊科技学院,山东 潍坊262700)
无线遥控小车的研发虽然起始于上世纪,但是其发展应用速度极快,已经在反恐、防爆、防核及防污染等技术上得到应用,其显著的特点为体积小、成本低,同时具有一定的应对恶劣环境的能力。本文设计与制作的智能小车是基于单片机原理的无线遥控智能小车,设计体现的主要为其智能性,可在1.5km 范围内通过无线遥控器指挥其前进和后退,主要应用在火灾现场勘探、交通事故勘测以及危险气体现场检测上。
1 无线遥控智能小车系统组成
本文设计的无线智能遥控小车组成系统分为两部分,即手持设备与车体。手持部分主要是遥控装置,包含了单片机模块、供电电路、显示模块、晶振电路、复位电路等,其系统的工作流程如下图1 所示:

图1 手持设备设计流程图
车体部分主要由无线管理模块、整体信息显示模块、测距管制模块、直流电动驱动模块以及小车障碍物检测模块组成,系统的工作流程如下图2 所示:

图2 车体设备设计流程图
2 基于单片机的智能小车系统架构原理
2.1 智能系统采用无线管理模式
无线智能模式是提高智能小车运动性的前提,在设计与制作中,优化了各个疏导节点,比如采用了双工交流模式与APC220 模块对智能系统进行了优化,从而让指令与协调坐标的制作更加灵活和简单。利用智能无线管理的模式,可以实现在固定波特率空间内对小车发送的无线数据进行传输,而且过渡交接的质量比较稳固,小车整个运动过程耗电量水平较低。很多无线管理系统内部存在数据积累严重的弊端,为了可以解决该类问题,可以在终端设置疏通流程中对小车进行100 字节的间隔调试,为了保证小车运动的灵活性,频率不得低于360ms。当小车系统需要发送数据的时候,直接将数据传输给SNUF 寄存器,无线模块APC220 引脚P30 位置则接收数据,实现APC 的自动发送,接收端同样的将接受到的数据从引脚P31位置输入给单片机,程序通过SBUF 寄存器读取相应的数据。
2.2 整体信息显示模块
设置整体信息显示模块,可以避免数据源产生偏差,实现整机运行的高效性。在模块设计中,可以将小车中的液晶显示接口与驱动媒介进行协调,对现场的各种管制数据进行近端和远端的直接测量。为了保证单片机的工作效率,可以将设备引脚位置与单片机实现精密连接,在电平脉冲搭配上,单片机也可以与另一复位模式引脚进行配合,这样就能保证小车运行整体信息的显示。在整体的复位操控过程中,要按照设置的模组进行10ms 的电平灌输,并对模组的功能进行重组,保证小车现场串行接口输入质量的效力,减少数据源的偏差。本设计利用MzLH03-12864 的串行接口搭配媒介资源,小车机理运行的最高时频效率整体维持在了4.4MHz 范围之下,整体性能较高。该模块的外围电路原理图如下图3 所示。
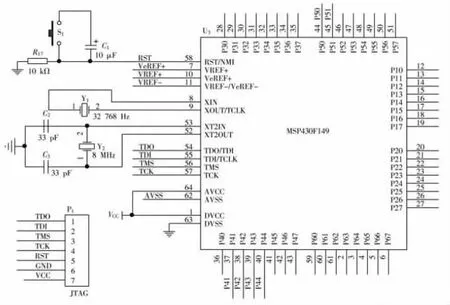
图3 整体信息显示模块外围电路图
2.3 利用超声格式设置测距管制单位
小车实际物理距离计算是智能系统的设计主要内容,本设计主要采用的模块系统是DYP-ME007 模块,可以实现小车运动过程中对各个障碍点的距离测试和计算,而测量的物理手段是采用超声波的形式,对目标声源的空间进行全部覆盖测量。
2.4 直流电动驱动模块
直流电动驱动是本设计智能小车的驱动系统。在具体的操控中,技术人员可执行特定的电机管制任务,将小车内的主控芯片与思路输出节点进行匹配,为了保证运行的畅通性,可以联合8 个二极管对小车进行续流渠道的保护。在该种驱动模块下,任何形式的二进制编码过程可让电机处在不同的工作状态下,结合滤波处理相关技术可实现空间的调停,有助于完善现场工序搭接的稳定性。该模块的外围电路原理图如图4 所示。
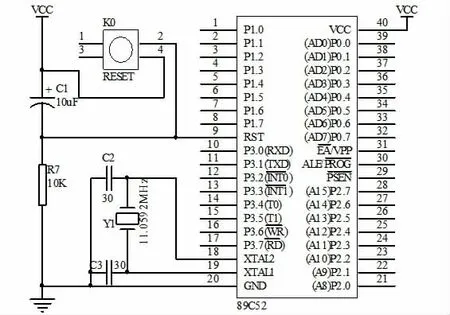
图4 直流电动驱动模块外围电路图
2.5 电子指南针模块
在设置后坐标自动让小车运行时,可以每隔一定的时间让指南针去修正超声波传感器的位置,这样就能用超声波传感器测量定位小车的位置,及时将数据回传给单片机。电子指南针模块采用的是GY-26,属于低成本平面数字罗盘,其优势是输入电压低、功效较小。工作原理为:利用磁传感器中的两个相互垂直轴同时感应地球磁场的磁分量,从而得出方位的具体角度,该指南针模块采用RS 协议和IIC 协议与其它设备实现通信。将该电子指南针模块用于小车主体中,不仅具有标定位置的功能,而且能够在任何位置找到合适的方位角,输出的波特率为9600bps,可以连续输出,也可以询问输出,同时也具备了磁偏角补偿功能,可以满足小车不同的工作环境。
2.6 小车障碍物检测模块
本模块主要是利用反射式光耦对现场空间进行改造。检测模块采用了LM324 电压比较设备,在疏导的过程中,当三脚位置电平超过二脚位置的电平数量时,那么单片机就会自动在二脚位置输出高电平,相反则是输出稳固的低电平。在设置电平的取值范围时,要结合LM324 两脚电平数值对单片机设置的数据进行科学的检定,为了保证检定的准确性,可将电位器与后续节点的两脚电压统一设置为3V。在避障电路的设置中,主要集中在小车前部左右的两端,这样做可以将小车四周的障碍物进行全面的检测。该模块具体的工作原理为:运行中未出现障碍物时,不激发红外线反射功能,光敏三极管也起到截止作用,LM324 的3 脚在R16 的作用下会出现上拉效应,使得高电平(5V)高于2 脚电压(3V),及时的将高电平输出。如果小车在运行中遇到障碍物,这个时候红外线就会产生发射作用,光敏三极管实现导通,这个时候进行3 脚接地质量检测,将会小于2 脚电压(3V),从而输出低电平。因此,该模块主要是利用单片机根据电平的变化来判断小车周边有无障碍物,左右两边遇到障碍物时,小车都会向相反的方向转向,从而保证运行的安全性。
3 对小车运行进行协调管制程序设计
在小车整体程序设计中,主要包含了手持装备和运动机械两种工序。单片机可以利用无线连接媒介对电化初始数据进行显示处理,同时利用此种功能稳固串行接口,之后则是联合主动管制软体对按键功能进行循环的监测,保证手持设备运行的持续性。在这里需要特别提醒的是,若是再调试流程中对按键部分的功能进行激发,那么有关串行口的数据就会得到重新的调用,将小车运行的数据直接的整合,将其显示在计算机终端上。单片机经过了电化工艺的调整后,其特定的无线模块与超声波装置会跟随串行接口调试基准进行远程的信息管理,使小车前进与后退动作顺利的执行。单片机对数据进行整合之后会与无线终端进行沟通,等到小车的整体操控性达到要求时,小车继续前进或者后退。
4 对测试结构进行综合分析
4.1 应用到的测试媒介
对小车进行功能性测试,用到的归控工具包括:刻度尺、秒表、卷尺等。
4.2 测试方法
为了保证测试过程的准确性,该流程测试方法的运用包括:一是,当小车运行在空旷的区域时,可以开启控制电源,利用无线手持设备对小车进行控制,一直达到小车定位信号响应为止。二是,将小车放在130cm×130cm 面积大小的平整木板上,在木板中间设置X 轴和Y 轴,设置好坐标后,让小车自动运行到该位置上,利用这种方法检定终点位置上小车精确管控的效果。
4.3 测试结果和结论
经过多次的反复测试,无线遥控器可以在1.5km 内对小车进行操控,小车运行状态良好,未发生碰撞和路线偏移情况,在遇到障碍物是能够及时左右掉头,在既定区域坐标检定范围与显示媒介的交流辅助下,无线遥感装置能够非常方便的稳定消除行驶路线,操作误差在可控的范围之内。
结束语
综上所述,智能机器人在各领域应用的逐渐增多,提高了生产生活效率。随着智能化技术的发展,无线遥控智能小车在反恐、防爆以及防污染等领域应用越来越多,满足了多样化的需求。通过设计相关的小车运行模块和反复的测试,无线遥控小车在1.5mk 内运行情况较好,手持遥控器在给定坐标之后,小车能够快速的找到目标地并到达指定的地点,定点的误差同样较小。此外,通过设置障碍物检测模块,小车可以完成行驶、反馈和寻找目标的多种功能,定位和防撞效果非常好,最终实现了在多种环境下的高效运行的目标。
猜你喜欢
铁道机车车辆(2021年3期)2021-07-12
科学家(2021年24期)2021-04-25
快乐语文(2020年36期)2021-01-14
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
电机与控制学报(2018年9期)2018-05-14
新少年(2017年1期)2017-03-15
