直升机频域参数辨识飞行试验数据选取准则研究
2021-01-25 03:39石佳伟房圣友
科技创新与应用 2021年5期
石佳伟,房圣友
(中国飞行试验研究院 飞机所,陕西 西安 7 10089)
1 概述
在直升机频域参数辨识中,试飞数据质量的优劣将直接影响辨识结果的精确性与可靠性。简单的说,若想要用辨识模型描述某种动态特性,则用于辨识模型的试飞数据中必须包含关于这种动态特性的信息,否则辨识结果将无法体现其动态特性。在目前的直升机飞行试验中,由于各种各样的原因,对飞行员的操纵激励要求仍存在不完善的地方,所获取的试飞数据在用于直升机频域参数辨识时,得到的结果精度有待提高。因此,本文将较为全面的对直升机频域参数辨识中试飞数据的选取准则进行讨论与总结,并根据直升机频域参数辨识过程中所暴露出的问题,对开展直升机参数辨识的飞行试验提供一定的参考建议。
2 试飞数据选取准则
在直升机飞行试验中,操纵输入一般是阶跃输入、脉冲输入和扫频输入三种。与前两种操纵输入相比,扫频输入能够获取的频率范围更为广泛,将时域数据转换到频域里后,得到的信息量更丰富。激励的频率范围在飞行试验时也能够被严格控制,起始于预先定义的最小频率,并终止于预先定义的最大频率,选择扫频输入更适合频域参数辨识。因此,本文将讨论和研究直升机扫频试飞数据的选取准则。
2.1 频率范围准则
在直升机飞行试验中,飞行员扫频输入的最大频率上限一般为2~3Hz,如果想要可靠的辨识出旋翼后退挥舞摆振动态,则需要扫频输入的频率达到3~4Hz,而针对旋翼的高频结构模态,扫频输入的频率必须达到5Hz 以上,通常,对这种高频的激励只能采用自动扫频输入进行。
针对直升机操稳特性的研究,其关心的频率范围约为 0.3~12rad/s,即 0.05~2Hz 左右,在实际飞行试验中,仅做操稳特性分析研究时,由于各种原因,可以不考虑直升机挥舞摆振等模态特性,采用飞行员人工激励即可满足要求,对其的频率范围要求为0.3~12rad/s。
针对飞行动力学模型的研究,为了提升模型的准确性与可靠性,必须考虑直升机的挥舞摆振成分。因此,需要采用自动激励器的方式进行扫频输入,且其扫频输入的最高频率应达到25rad/s 以上,所以对其的频率范围要求为 0.3~25rad/s。
2.2 采样率准则
采样率也被称为数据采集采样速率,它与数据系统滤波器的选择直接决定于辨识模型应用的频率范围。首先考虑信号处理滤波器,如噪声滤波器或者抗混叠滤波器,一般希望在系统的所有输入和输出信号上施加同一辨识滤波器,否则容易使辨识出的模型表现出虚假的高频相位超前,从而增大参数辨识的误差。
在滤波器实际应用中,由于传感器噪声、大气干扰等因素的存在,若将滤波器频率设置较低,在接近最大频率ωmax处很难得到精确的辨识结果。因此,作为一种良好的经验法则,滤波器的截止频率ωf(也称为滤波器带宽)最少应为模型关心的最大可能频率ωmax的5 倍。

选定滤波器后,将对数据采集采样率ωS进行选取,与滤波器类似,对需对所有信号选择相同的采样频率,保守取值,应至少为滤波器频率的5 倍。

针对直升机操稳特性的研究,其关心的频率最大可能值为12rad/s,约为2Hz 左右,其采样率则需要达到50Hz 以上。
针对飞行动力学模型的研究,其关心的频率最大可能值为25rad/s,约为4Hz 左右,其采样率则需要达到100Hz 以上。
2.3 试飞数据长度准则
即使在激励直升机响应时已考虑得比较全面,采集的试飞数据记录长度还是必须与感兴趣的模态周期相匹配。尽管从理论上说,单个模态可以从长度等于该模态一个周期的数据记录中辨识出来,但在实际应用中存在许多干扰因素如测量噪声、大气扰动、多个相互接近的模态以及模型结构的不确定因素等,这些因素都要求更长的数据记录。一般来说,扫频数据中应至少包含两个最长周期模态,才能激发出低频段的特性。再加上需要包含数个过渡的中频段信息,以及高频部分,理想状况下整个数据记录长度应达到最长周期的4~5 倍。若受试验条件限制,达不到理想要求,则扫频数据中应至少包含一个最长周期模态,再加上中频段与高频段的信息,数据记录长度至少应达到最长周期的2 倍以上。
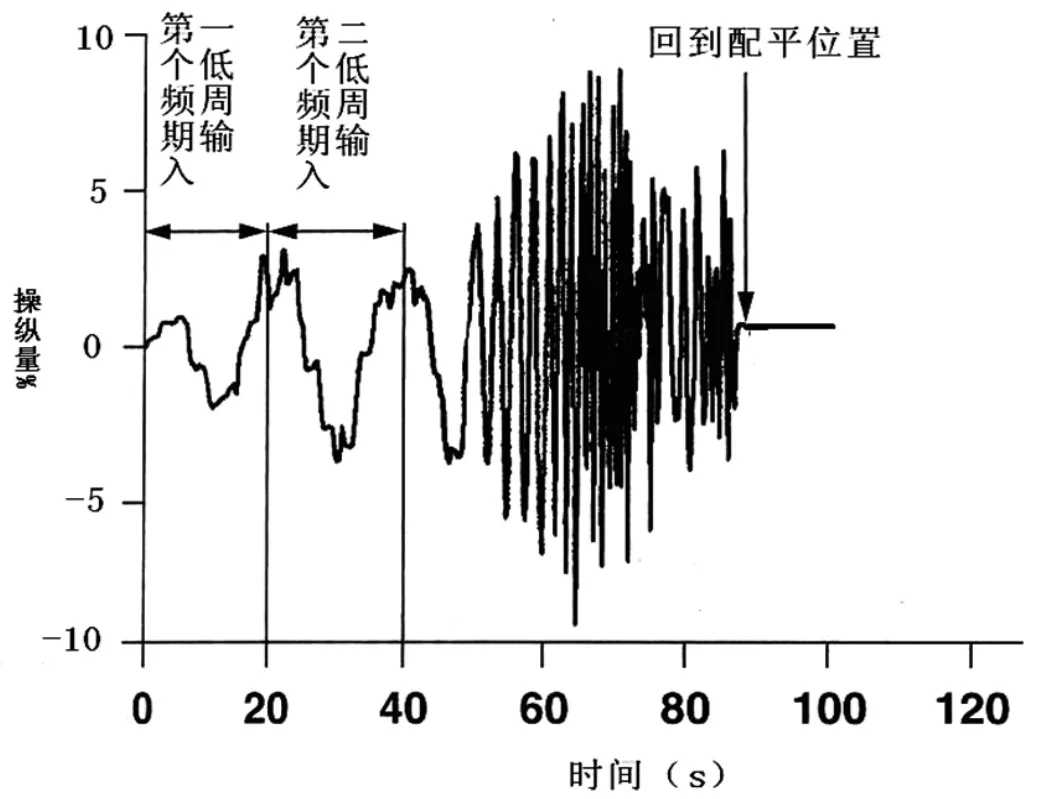
图1 理想扫频输入的时间历程
在参数辨识中,所关心的最长周期模态频率为0.3rad/s,也就是0.05Hz,其对应的时间历程为20s 左右,因此,希望的试飞数据记录长度应大于80s,如图1 所示。
2.4 控制输入间的相干函数准则
在直升机飞行试验中,一般采用单通道激励多通道输出的模式,但由于直升机的轴间耦合,总是会形成多通道输入多通道输出的现象,当次要控制量严重影响主要控制量的激励时,则获取的试飞数据无法用于频域参数辨识,大大较低了飞行试验的效率。
以纵向扫频输入为例,纵向舵偏输入bls 为主要控制,横向舵偏输入als 为与纵向舵偏不相关的次要控制。引入交叉控制相干值K,即控制输入间的相干函数,来表征两个控制输入之间的相关性。

其中Gb1s.b1s为主要控制的自功率谱密度,Ga1s.a1s为次要控制的自功率谱密度,KCF为由未知动态构成的传递函数,其形式可以复杂也可以简单,可以是一个简单的常数,也可以是一个频率的高阶动态函数。
当控制输入之间完全相关,即没有不相关的部分,由横向舵偏输入计算的Ga1s.a1s等于0,此时交叉控制相干值为1,这样的数据将无法用于频域参数辨识。经过大量的计算发现,当交叉控制相干值小于0.5 时,获取的试飞数据满足计算要求,可用于直升机频域参数辨识,因此,要求获取的试飞数据的交叉控制相干值小于0.5。
2.5 控制输入与响应输出间的相干函数准则
控制输入与响应输出间的相干函数是描述信号在频域的统计性质,其计算公式可以定义为如下形式:

其中Gxx(ω,T)、Gff(ω,T)为输入与输出的自功率谱密度,Gxf(ω,T)为输入与输出间的互功率谱密度。
相干函数反映了激励和响应信号在所检测频率范围内的线性相关程度,如果说明响应信号完全由对应激励产生,如果说明实测响应信号与实测激励信号完全无关。
通常情况下,相干函数的临界计算值为0.6,当低于0.6 时,说明实测响应信号与实测激励信号相关性较低,获取的数据质量较差,辨识得到的结果可信度低。所以在进行直升机域参数辨识时,获取的试飞数据其操纵激励与响应输出间的相关函数必须大于0.6。
3 算例验证与分析
3.1 算例验证
选择直升机线化小扰动横航向辨识模型作为算例,对其进行频域参数辨识,获取气动导数,并在时域里检验。辨识模型如下所示[3]:

上式中 v 为侧向速度,p 为偏航角,r 为滚转角,φ 为偏航角角速率,als 横向舵偏输入,thtr 尾桨舵偏输入。
算例中所使用的试飞数据为直升机操纵性与稳定性飞行试验中获取的。共计得到直升机悬停状态下,横向与航向扫频数据各六组。通过试飞数据的选取准则对试飞数据进行筛选。不满足要求的数据将予以剔除。
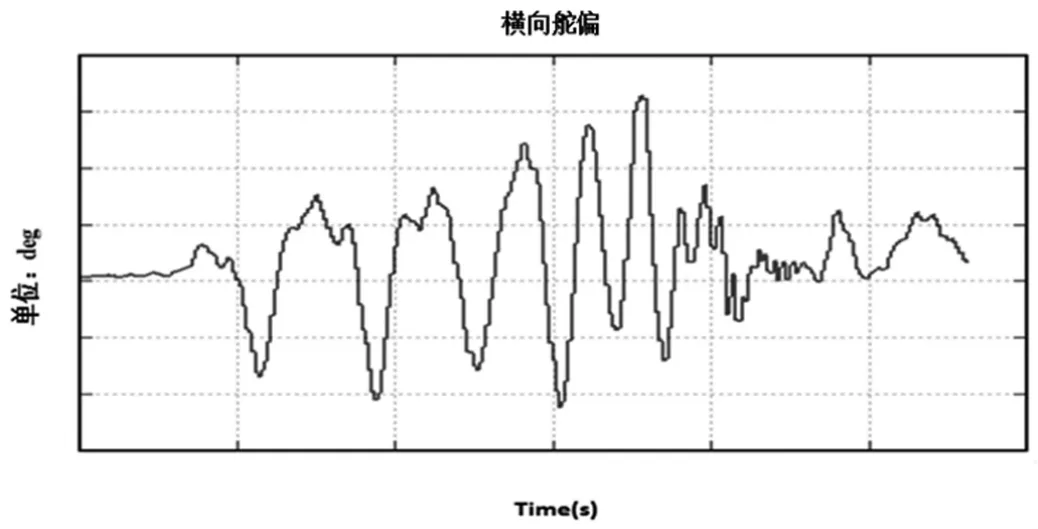
图2 横向第1 组扫频数据的时间历程
图2 中所展示的横向扫频数据,严重缺失低频、高频段信息,没有达到要求,因此,应当剔除。
图3 中所展示的横向扫频数据,其主要控制输入(横向)与次要控制输入(纵向)存在较强的相关性,交叉控制相干值计算结果大于0.5,因此,应当剔除。
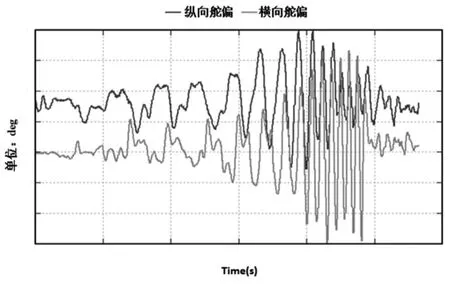
图3 横向第3 组扫频数据的时间历程
诸如此类,通过试飞数据的选取准则对获取的数据进行筛选,最终得到两组可用的横向扫频数据与两组可用的航向扫频数据,并进行频域参数辨识,其辨识结果如下:
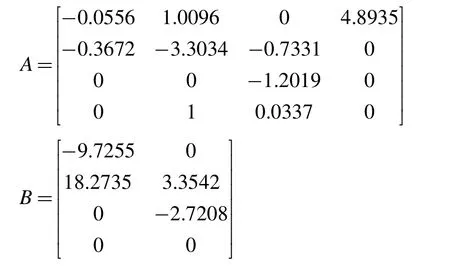
A 阵中参数为直升机稳定性导数,B 阵中参数为直升机控制性导数。

图4 v、p、r、φ 辨识结果时域验证曲线图
时域检验结果如图4。
图4 为侧向速度、偏航角、滚转角以及偏航角速率的时域验证曲线图。从图中可以看出,侧向速度、偏航角、滚转角以及偏航角速率辨识模型的预测响应与飞行试验数据吻合度较高,响应趋势也基本一致。但四个参数均表现出低频段吻合度略低于高频段的趋势,且高频段幅值略低于试飞数据。
3.2 分析
现代电传直升机具有较好的飞行控制系统,而飞控系统又具有增稳作用,在飞行员做低频段的扫频输入时,增稳作用会将低频段的扫频激励通过反馈配平抵消掉,无法得到预期的舵偏响应。如图5 所示。
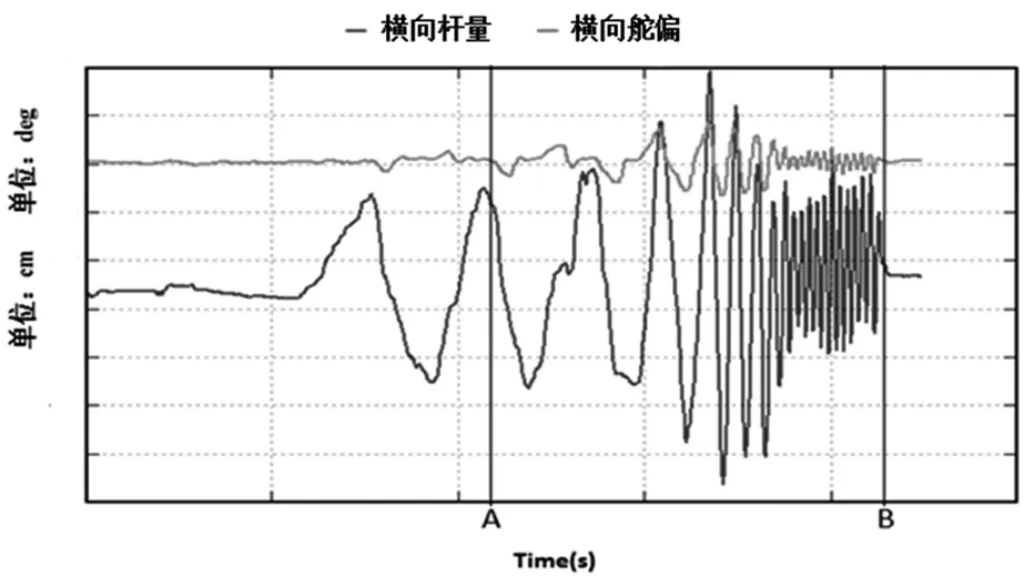
图5 横向第5 组扫频数据的时间历程
当飞行员在0-A 段进行低频段扫频输入时,杆量很好的记录下了其时间历程,而舵偏却近乎没有变化,处于稳态之中。当飞行员在A-B 段中进行中高频段扫频输入时,舵偏才逐渐的有了响应,并和杆量同步,直至结束。这是因为飞行控制系统增稳机制介入造成的。在低频段,当飞行员进行扫频动作时,飞控系统会认为这是直升机遭遇了微小的气流扰动,通过反馈调节使直升机系统趋于稳定的状态,从而无法激励舵偏,得到其低频段的响应。
在飞行试验中,关心的频域范围为0.3~12rad/s,最低频率0.3rad/s 其对应的动态最长周期为20s 左右,这应当为飞行员做扫频输入时第一个完整的周期所需要的时间。以用于辨识的横向扫频数据为例,如图6 所示。
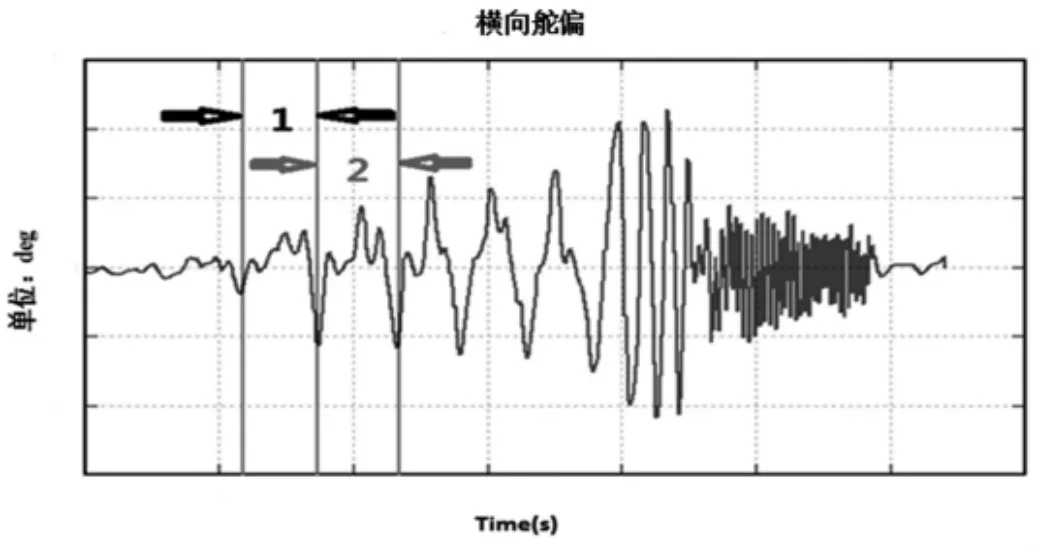
图6 横向第6 组扫频数据的时间历程
从图中可以得到,飞行员经过稳态开始做扫频输入时,最开始的两个周期用时约为6s,随后动作逐渐加快,频率提高。扫频周期6s 换算为频率约为1rad/s,结果表明,获得的试飞数据中,没有0.3~1rad/s 的信息,存在低频段信息缺失,从而使辨识出的模型在低频段精度存在差异。
综上所述,由于获取的飞行试验数据在低频段存在数据缺失,辨识中没有数据支撑,得到的模型在低频段存在失真。而高频段是由于现有的试飞数据是在直升机操纵性与稳定性飞行试验中获取的,没有考虑挥舞摆振,所以辨识模型中没有挥舞摆振的部分。而试飞数据中虽没有激发挥舞摆振的动力学特性,但挥舞摆振总是存在的,因此,高频段也存在一定的误差。除此之外,时域验证的数据存在低频段与高频段的缺失,这也是造成低频与高频段吻合度差的原因。
总体而言,辨识得到直升机横航向辨识模型能很好的预测直升机在此飞行条件下的动力学响应特性,所以辨识得到的模型是正确的和可信的。因此,也能够验证本文研究的试飞数据选取准则的可靠性。
4 结论
本文根据所研究的直升机飞行试验频域参数辨识数据选取准则,对获取的直升机悬停状态下横向,航向数据进行筛选,再基于筛选的数据进行频域参数辨识,并最终通过时域检验,验证本文试飞数据选取准则的可靠性。本文除归纳总结出第二节中对试飞数据的要求外,通过频域参数辨识过程中暴露问题,现对开展直升机参数辨识飞行试验提出几条建议:
(1)在保证安全的前提下,尽量多的关闭飞控功能,避免控制输入之间的强相关问题。
(2)主通道做扫频输入时,其他次要通道进行维持配平状态的控制输入,尽量减少与主扫频通道之间的关联,保证主通道激励与各响应之间具有较高的线性程度。
(3)飞行员在扫频过程中,一定要注意激发出直升机低频段的动力学特性,借鉴动态最长周期,前两个扫频输入的周期一定要达到20s 以上。
猜你喜欢
成都信息工程大学学报(2021年1期)2021-07-22
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
地震研究(2021年1期)2021-04-13
航天器环境工程(2020年3期)2020-11-04
航天电子对抗(2019年4期)2019-12-04
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年3期)2017-11-23
电子制作(2017年8期)2017-06-05
移动通信(2016年22期)2017-03-07
CHIP新电脑(2016年3期)2016-03-10