基于无人机倾斜摄影测量技术的水电站坝面裂缝检测研究
2021-01-25 03:39邓雅心骆旭佳李红林吴清海余磊鑫蒯梦珂
科技创新与应用 2021年5期
邓雅心 ,骆旭佳 ,李红林 ,吴清海 ,余磊鑫 ,蒯梦珂
(1.江苏海洋大学,江苏 连云港 222005;2.浙江华东测绘与工程安全技术有限公司,浙江 杭州 310000)
引言
水资源时空分布极不均匀,水旱灾多发频发,自古以来就是我国的基本水情。建设水库大坝,注重发展水电,将水力发电这种清洁能源方式与大坝防洪防汛的作用结合起来,有助于优化现有能源结构,保障国家社会经济的良性发展。依照水利部《第一次全国水利普查公报》,我国己建成的水库大坝达9.8 万余座,是拥有水库大坝数量最多的国家之一[1]。水库的数量和重要性决定了对水库大坝定期巡检,实施安全管理的必要性。所以,为了保障水库正常运作并发挥其效用,确保水库大坝的安全就是一项涉及到社会经济稳定发展的重要工作,研究高效智能的大坝安全管理方法对国家和地区都具有相当重要的意义[2]。
大坝表面缺陷检测主要有三个检测重点[3]:(1)裂缝是大坝最为常见的病害。大坝多采用钢筋混凝土结构建成,体积大,钢筋混凝土构筑物大都是带裂缝工作的。当裂缝较为细小且对建筑物结构不构成威胁时,无需对其进行处理,但当裂缝密集或增大到一定程度时,可能造成严重的溃坝事故;(2)渗漏是大坝的另一缺陷。渗漏使混凝土遭受缓慢侵蚀,致使其强度下降甚至失去强度而遭到损坏[4];(3)结构破损是较为显著的缺陷,破损严重的会导致坝体结构因为错位及压力产生损坏。
传统的大坝缺陷检测多是利用测绘专用仪器对大坝构筑物的各个部位进行检测和记录。在此过程中,检测人员需被吊机悬挂在高空或站在预先搭设的排架上,在高空平台上进行检测作业。这种外业检测方式工作量大、工作强度高、工作周期长、动工成本高且安全性差。同时,当工作人员被悬挂在高空时,其观测视野较为局限,这可能会造成排查不够全面,检测结果遗漏等问题[2]。运用无人机倾斜摄影测量技术采集大坝数据,可实现远距离、非接触条件下的大坝裂缝安全检测,工作量小,周期短,人员安全得到较强保障。

图1 传统人工吊篮检查和无人机操作对比
1 技术路线
结合某水电站大坝的坝面安全检测需求,重点的检测对象为大坝主体建筑的裂缝情况。本文将无人机倾斜摄影测量技术与机器视觉识别缺陷结合起来,首先通过无人机搭载高效专业的数据采集设备获取大坝航飞成果,然后经专业的数据处理软件生成大坝实景精细三维模型,最后利用机器视觉自动检测坝面缺陷,并对缺陷进行定量化处理。
1.1 无人机技术
无人机(unmanned aerial vehicle,UAV)是包括固定翼、无人飞艇、旋翼、热气球在内的一系列通过遥控操作或自主无人控制的空中飞行器的总称。就获取高分辨率影像而言,常搭载数码相机作为传感器,主要用于厘米级分辨率遥感数据和空间信息数据的快速获取、处理和建模[3]。无人机航测具备云下作业、高现势性、小范围、高清晰、大比例尺、小型轻便、高效机动的特点[4],广泛应用于基础测绘[5-6]、应急救灾[7]、高压线缆与农林巡视[8]等领域。无人机按外形结构可分为多旋翼无人机和固定翼无人机,多旋翼无人机的螺旋桨数量越多,飞行越平稳,可操作性越强,可折叠、垂直起降、悬停,对场地的要求低[5-6]。无人机技术的应用优势主要有三点:(1)现场作业速度快,数据精度高,搭载不同的传感器可获取不同的数据,如搭载相机可获取影像、照片;搭载激光雷达可获得激光雷达点云数据;(2)实施周期短、现势性强、成本低,可弥补人工外业测量效率低、数据信息延迟、成本高及数据不连续和不直观的缺陷;(3)可利用专业的数据处理软件,对所得数据进行数据预处理后进行精细三维建模,还可处理为任务所需的DEM、DOM、DSM 等地理数据。
1.2 倾斜摄影三维建模
倾斜摄影测量技术利用无人机作为传感器的搭载平台,通过在同一平台上搭载5 台或3 台传感器,从1 个垂直、4 个倾斜这5 个不同角度采集影像,获取测量目标地物更为准确、全面、真实的信息[5]。在拍摄影像时,充分体现了无人机灵活、高效的特点,同时记录航高、航速、航向和旁向重叠、坐标等参数。倾斜摄影具有以下特点:(1)多角度观察目标地物,全方位地反映目标地物的实际状况,使无人机测量具备全局观测的特点[9-10];(2)可实现影像单张量测。通过专业测绘和地理数据处理软件,可直接基于在三维模型成果上进行包括坐标、高度、长度、面积、坡度、角度等的量测[11-12];(3)数据量小。与传统的三维 GIS数据相比,倾斜影像的数据量更小,为数据的传输与共享带来了极大的便利。
1.3 改进的全卷积神经网络(I-FCN)
FCN(full convolutional neural network)网络主要的构成部分是下采样和上采样,其中下采样部分由卷积层和池化层构成(本网络采用最大池化);上采样部分由反卷积层和 softmax 分类层构成。考虑到本文的检测对象为大坝表面裂缝,其像素占图像像素比例低。若采用传统的FCN网络进行检测,在经过多次池化操作过后,会损失掉更多的信息,导致检测裂缝的准确率降低[13]。基于此,本文运用一种改进的全卷积神经网络(improved full convolutional neural network,I-FCN),该网络对于裂缝的检测具有较强的针对性,在传统FCN 的下采样部分,用部分卷积层代替池化层,更多的保留了裂缝信息,从而达到提升I-FCN 裂缝的检测精度的目的,其网络框架如图2。
2 实验
为验证本文方法的有效性,以官地水电站大坝主体作为研究对象,通过多旋翼无人机对某水电站实施近距离、高清晰的倾斜摄影测量,获取大坝整体的倾斜影像。内业处理中利用倾斜三维建模技术还原大坝坝体表面信息,实现对大坝整体的精细实景三维建模。按照拟定分析指标,运用机器视觉对渗漏、表面结构破损、裂缝等进行大坝表面裂缝的检测,实现目标对象的坐标定位及真实量测,从而完成大坝表面缺陷检测,为大坝安全巡视与日常维护提供参考。
2.1 倾斜三维建模
2.1.1 数据采集
数据的获取是前期工作的关键环节,而获取的影像质量也会直接影响三维模型的效果;经分析影响无人机航飞效果的主要因素有航线、相对航高、重叠度等,实施航空摄影前需充分考虑这些因素,设置合理的参数保证影像质量[14]。
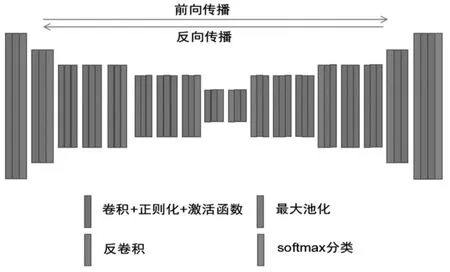
图2 I-FCN 网络框架
本次研究选取某水电站大坝表面进行研究,外业倾斜摄影测量设备选用大疆M600 六旋翼无人机+索尼A7R相机,大疆M600 六旋翼无人机机身轻便灵活、操作性强、可定点悬停拍摄。具体到拍摄时,我们将根据坝体的大小划分合适的区块,按坝段布置两到三条测绳,测绳间距5~10m,无人机按测绳保持固定间距拍摄。本次项目拍摄的倾斜影像,分辨率为1.5cm/像素,共2800 张,重叠度≥75%。经检查,数据满足倾斜三维建模任务的需求。
2.1.2 数据处理
本文采用Context Capture 软件对倾斜数据进行处理[14]。在将数据导入软件之前,要对影像数据进行检查,准备好软件需要的数据表,该数据表包括影像对应的POS 数据,影像信息、传感器信息、坐标信息等。然后将影像和与之对应的POS 数据分别导入软件,选择对应的坐标系,提交初步空三运行。空中三角测量是三维重建的前提也是最重要的一步,在数据处理过程中往往会出现点云数据分层,照片丢失等情况,这就需要反复刺连接点,直到满足任务要求。最后,导入外业测量的像控点坐标,并在相应的影像上刺点,进而通过影像密集匹配,密集点云构建 TIN 模型,纹理切片自动映射等过程,最终得到对应坐标系统下的具有真实坐标的倾斜摄影三维模型[14]。倾斜摄影三维建模技术流程如图3。
2.2 缺陷检测
2.2.1 数据集与硬件平台
本文用来构建数据集的数据是应用于三维建模数据预处理后的照片,数据集共包含1200 张照片,每张照片大小为 480×480。在训练过程中,按照 8:1:1 的比例将数据集随机分为训练集、验证集和测试集三部分。
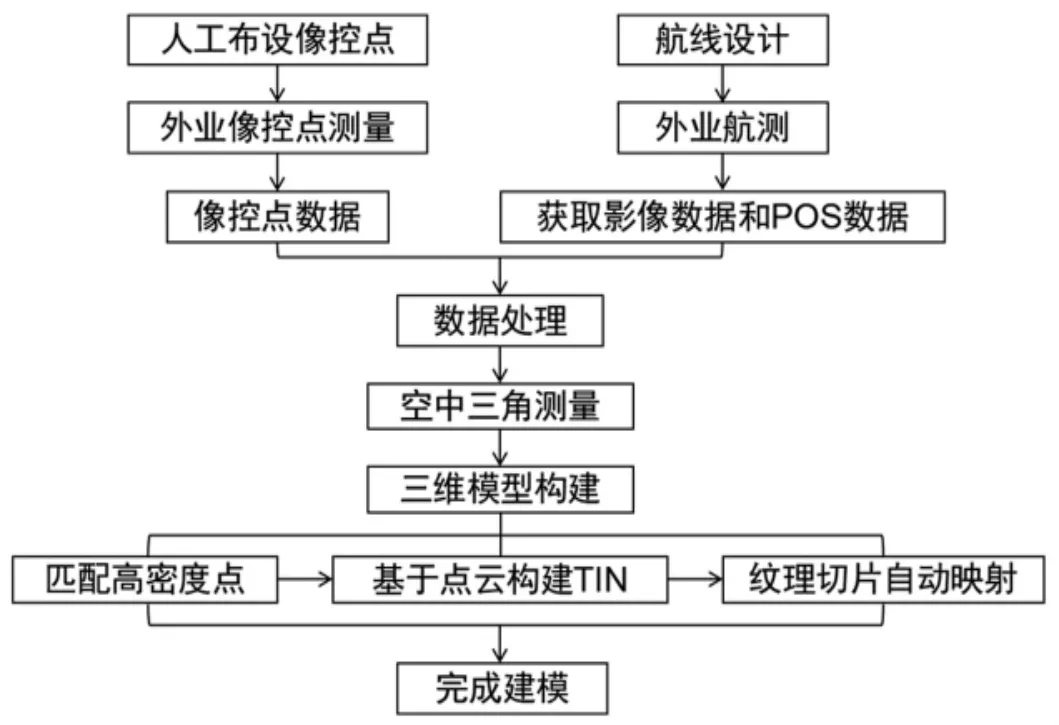
图3 三维建模流程图
本研究实验是在微星MS-7A78 上进行开发的,其显卡型号是NVIDIA GeForce GTX 1080 Ti,拥有64GB 运行内存。利用Pycharm2017.3 以及Anaconda3 集成开发工具。采用深度学习 TensorFlow 框架进行改进的全卷积神经网络模型的搭建、训练和测试。
2.2.2 网络模型训练结果及分析
为了验证改进的全卷积神经网络(I-FCN)对裂缝识别的有效性,分别使用FCN 网络和I-FCN 网络对预处理后的数据进行训练。具体到网络训练过程中,每一轮迭代都会得到一个输出结果,网络损失值就代表这个输出结果与标准结果的差异[13]。网络训练的目的就是通过多次的迭代运算减小这个差异,最终使训练的网络模型达到收敛[14]。由于裂缝识别是像素层面的检测,可将像素分为正样本像素(裂缝像素)和负样本像素(背景像素)两种,因此预测情况分为以下四类[15]:正样本判定为正样本(true positives,TP);正样本判定为负样本(false negatives,FN);负样本判定为正样本(false positives,FP);负样本判定为负样本(true negatives,TN)。因此根据混淆矩阵计算原则,可以将像素准确率(accuracy)、召回率(recall)和交并比(IOU)作为网络的评价指标,具体计算如下:
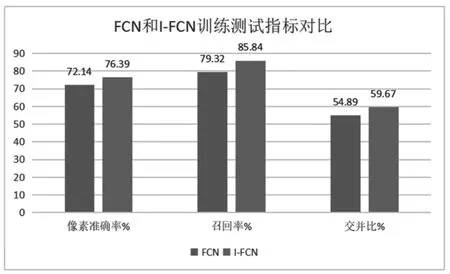
图4 FCN 和I-FCN 训练测试指标对比图
(1)像素准确率(accuracy)。表示被正确识别像素占总像素的比例。公式表示如下:accuracy=TP+TN/TP+TN+FP+FN
(2)召回率(recall)。表示被正确识别的正样本像素占应当被正确识别的像素比例。公式表示如下:recall=TP/TP+FN
(3)交并比(IOU)。表示被正确识别的正样本像素占应当被正确识别的像素和负类像素被识别为正确像素之和的比例。公式表示如下:IOU=TP/TP+FP+FN
通过多次迭代训练后,模型最终达到收敛。I-FCN网络得到的损失值相比于FCN 网络更低,像素准确率、召回率和交并比分别达到76.39%、85.84%和59.67,相较于FCN 网路分别提升了4.25%、6.52%和4.78%。FCN 和I-FCN 网络训练测试指标对比簇状图如图4。
3 结果分析
选取具有代表性的2 张影像进行标记及分析,共发现裂缝4 处。通过I-FCN 对特征区域的裂缝进行检测,准确检测到4 处裂缝,对应到大坝精细三维模型上对裂缝坐标和长宽进行标注和记录,结果如图5 所示。检测出的4 条裂缝的具体坐标、高程、长度和宽度如表1 所示(出于保密和安全考量,本文涉及的坐标以及高程均为加密数据)。为验证本文方法的有效性,将运用本方法检测出的裂纹信息与外业实地测量的数据进行比对,误差均小于0.01,满足项目实际需求。
4 结论
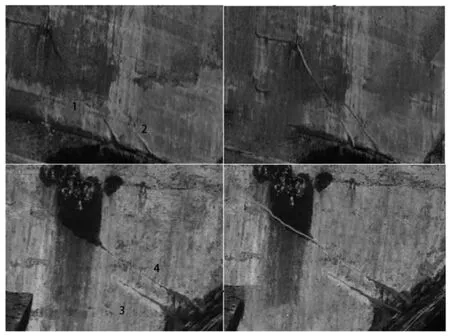
图5 裂缝检测示意图
针对大坝裂缝的检测,本文提出了无人机倾斜摄影测量技术结合改进的全卷积神经网络(I-FCN)对大坝裂缝进行识别和定量化分析,通过在官地水电站大坝主体建筑上进行裂缝检测实验,准确检测出了目标区域误差范围内的裂缝信息,证实了本文方法的可行性。本文方法较传统人工检测方法安全性更强,具有目标检测所需要的强针对性,较大地提升了大坝裂缝检测的效率,为大坝裂缝检测的方法增添了新的内容。
同时,本文提出的方法也存在诸多的不足,例如:(1)裂缝识别未能在三维模型上直接识别,在二维对应三维的过程中需要人工对应,不能够实现二三维之间的联动;(2)未涉及到裂缝深度的量化计算;(3)未能提供大坝渗漏和结构破损等缺陷的有效识别方法。为了更好地进行大坝裂缝检测,排查大坝缺陷,后期将针对现有不足进行更深入的研究。
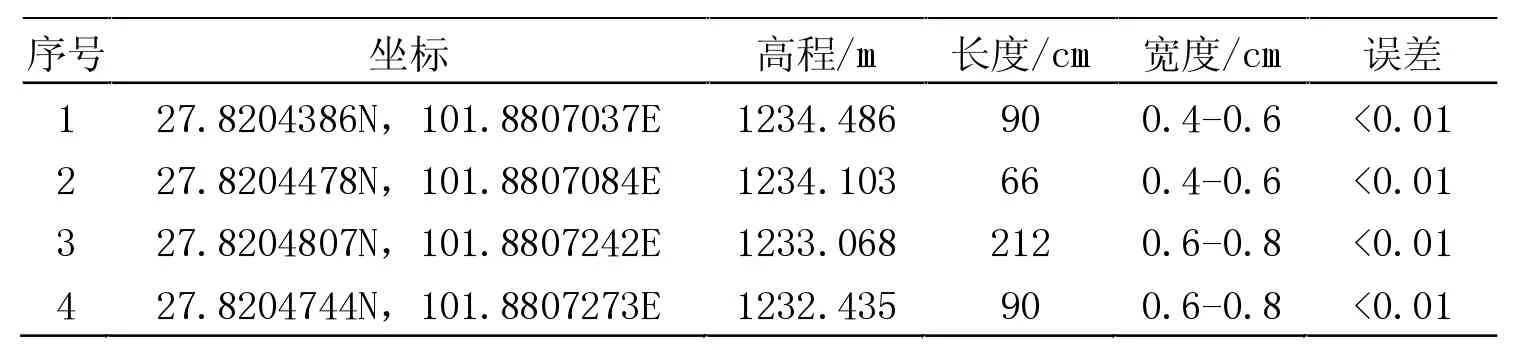
表1 大坝表面裂缝情况分析表
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年13期)2020-01-14
红领巾·萌芽(2019年8期)2019-08-27
电子制作(2019年11期)2019-07-04
北京航空航天大学学报(2018年1期)2018-04-20
百科知识(2018年6期)2018-04-03
少儿科学周刊·少年版(2016年4期)2017-02-15
CHIP新电脑(2016年3期)2016-03-10
数码影像时代(2006年5期)2006-05-29