
基于电力电子变压器的低压微电网负荷灵敏度在线辨识
2021-02-22 10:22孙玉巍马敏付超
现代电力 2021年1期
孙玉巍,马敏,付超
(分布式储能与微网河北省重点实验室(华北电力大学),河北省 保定市 071003)
0 引言
近年来,随着新能源技术的发展,电网发电侧和用电侧随机性增加,柔性负荷控制[1]作为有效的需求侧管理技术,丰富了电网调度调节手段,得到越来越多的重视。其中,降压节能(conservation voltage reduction, CVR)[2-3]技术基于负荷模型,通过调节电网电压实现负荷柔性调节,具有较好的实用性。传统变压器缺乏控制灵活性,难以满足智能电网的柔性负荷管理要求,基于电力电子变换技术的新型变压器—电力电子变压器(power electronic transformer, PET),由于其高度灵活可控性在输配电系统中得到了广泛的关注,为实现负荷柔性控制提供了技术支撑。本文将基于负荷参数在线辨识的柔性负荷控制措施应用在含有电力电子变压器的低压微电网中,参与电网调度,从而更好地实现系统的优化运行。
降压节能技术的节能效益即负荷功率减小的百分比与电网电压降低的百分比之间的比值(CVR 因子)主要取决于系统负荷的组成成分,因而负荷模型建立的精确与否对计算CVR 的效益有重大影响。随着电网的快速发展,系统规模的逐步增大,使得传统的负荷模型和“典型参数”难以匹配实际电网的系统参数,负荷灵敏度在线辨识是解决以上问题的新方法,本文主要研究负荷静态电压、频率特征系数的在线辨识。
文献[4]针对主动配电网参与市场购电,提出利用CVR 实现主动配电网运行安全性和经济性的优化运行模型;文献[5]分析研究了基于智能变压器的电压/频率过载协调控制,上述2 篇文献均是在负荷参数为固定值的情况下进行分析研究,未考虑负荷的时变性,且随着大量分布式电源(distributed generator, DG)的接入[6],负荷成分愈加复杂,时变性也更加凸显。文献[7-8]分析了负荷模型参数的选取、简化及适应性等问题,在一定程度上缓解了负荷建模“典型参数”选取粗糙的问题;文献[9]研究了电力电子变压器的负荷灵敏度在线辨识,且考虑了负荷的时变特性,但未对该方法的应用做深入研究;文献[10]在文献[9]的基础上研究了负荷灵敏度在线辨识方法的应用,但其相关分析仅针对系统低压侧负荷的电压特性进行了讨论,未考虑负荷的频率特性。
鉴于上述研究不足,本文对含有PET 的低压微电网负荷灵敏度在线辨识方法及应用进行深入研究,通过辨识模型实时获得系统负荷电压、频率精确特性参数,再利用PET 电压/频率协调控制更好地实现电网柔性控制与管理。首先通过研究三级式AC/DC/AC 型PET 的拓扑结构和控制策略,建立主网与微网通过PET 连接的系统模型;其次通过PET 控制低压侧微电网的电压、频率变化,实现负荷静态电压、频率特征系数的在线辨识,以得到精确的负荷静态模型,同时考虑不同DG 渗透率对负荷参数的影响。最后根据所得的负荷参数,准确判断电网柔性可调节负荷容量,通过PET 参与电网调度,实现电网柔性负荷控制及响应需求侧管理。
1 PET 拓扑与控制
随着智能电网的发展,含有中间直流环节[11]的AC/DC/AC 型PET 是目前主要应用的拓扑,它可以实现输入/输出侧电压/功率的灵活控制以及有功/无功的独立解耦。本文应用的AC/DC/AC 型三级PET[12-13]拓扑结构如附录图A1 所示。
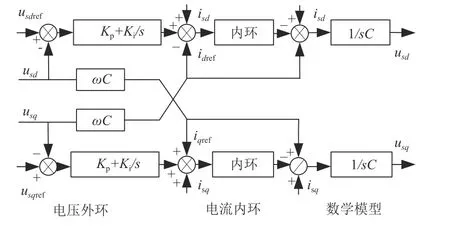
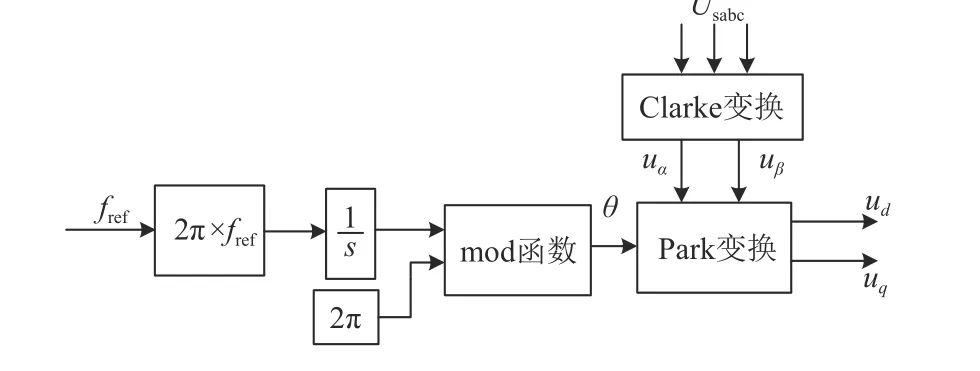
其中PET 输入级采用三相电压源型整流器(voltage source rectifier, VSR);隔离级采用双有源桥(dual active bridge, DAB)变换器;输出级采用三相电压源型逆变器(voltage source converter, VSC)。PET 通过对电力电子器件的控制可以实现高压侧与低压侧交流电压与频率的解耦,本文负荷参数辨识工作主要在PET 低压侧进行,采用比例积分控制器和引入d-q 轴电压解耦补偿项,得到附录图A2 所示的VSC 双闭环控制图实现系统交流电压的控制,其中usdref、usqref、idref、iqref和usd、usq、isd、 isq分别为VSC 交流侧参考电压、电流和实际电压、电流的d-q 轴分量;与附录图A3 的频率控制图共同实现系统的电压/频率协调控制,其中fref为系统参考频率;Usabc为PET 低压侧VSC实际交流电压。
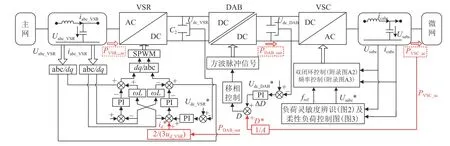
图1 PET 整体控制策略Fig.1 Overall control strategy of PET
AC/DC/AC 型PET 各级整体控制框图如图1所示。其中,Uabc_VSR、iabc_VSR为VSR 交流侧电压和电流;Udc_VSR、U*dc_VSR分别为VSR 直流侧实际电压和参考电压;Udc_DAB、U*dc_DAB分别为DAB 副边实际电压和参考电压;U*sabc、icabc分别为PET 低压侧VSC 交流参考电压和实际电流。输出级VSC 采用附录图A2 的双闭环控制及附录图A3 的频率控制,实现交流输出电压及频率的稳定,从而对负荷静态电压/频率特征系数进行辨识,并最终实现柔性负荷控制;隔离级DAB 采用移相控制,稳定输出直流电压;输入级VSR 采用双闭环d-q 解耦控制,控制三相正弦并网电流和功率因数,以及直流电压的恒定。为了加快PET 动态过程中前一级对后一级的功率跟踪,引入功率前馈控制通道。
1.1 由VSC 到DAB 的功率前馈
DAB 的移相比D 由2 部分组成:

式中:ΔD 由DAB 直流链电压Udc_DAB经PI 控制输出得到;D*为前馈量,由功率守恒计算得到。
DAB 功率PDAB_out与移相比的传递函数定义为前馈支路传递系数A[14],如式(2)所示:

式中:n 为DAB 原/副边变比;D0为DAB 稳态工作下移相比;fs为DAB 开关频率;Lt为DAB 折合至一次侧的等效漏感。已知系统低压侧VSC 功率为PVSC_ac,依据功率守恒:

则有:

1.2 由DAB 到VSR 的功率前馈
VSR 双闭环控制中d 轴电流id由2 部分构成:

式中:Δid由VSR 直流电压Udc_VSR经PI 控制输出得到;id*为前馈量,由有功功率守恒计算得到。d-q 轴解耦后VSR 功率计算式为

式中:ud_VSR、id_VSR为d-q 解耦后的VSR 的d 轴电压、电流。
已知DAB 功率为PDAB_out,依据功率守恒:

则有:

上述各式中变量符号与图1 相对应。
2 负荷灵敏度在线辨识
2.1 综合负荷特征系数
负荷模型[15-16]可以分为静态负荷模型和动态负荷模型,本文主要研究静态负荷模型,以ZIP模型为例,描述负荷特性的幂函数模型如下:

式中:P、Q 分别为负荷有功功率和无功功率;U、f 分别为电网电压和频率;P0、Q0、U0、f0分别为系统运行有功功率、无功功率、电压和频率的初始稳态值;Kup、Kuq、Kfp、Kfq分别为负荷有功功率、无功功率的电压特征系数和频率特征系数。
负荷功率对电压、频率特征系数的定义[15]如式(10)、(11)所示,是指当负荷有功功率、无功功率和电压、频率均取百分值(或标幺值)时,功率对电压及频率的变化率。

式中:ΔU、Δf 分别为系统电压、频率扰动量;ΔP、ΔQ 分别为电压、频率扰动时负荷有功和无功功率的变化量。若使用式(9)所示的指数模型,其指数求解方程即为式(10)、(11)。
几种常见的负荷特征系数如下文所述。
1)恒定阻抗型负荷。
感性负荷和容性负荷电压、频率特征系数分别为:
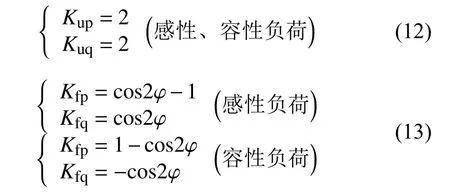
式中 φ为恒定阻抗负荷功率因数角。
2)恒定功率型负荷。
其电压、频率特征系数均为

对于接在同一母线上的综合负荷,根据各组负荷组成成分的静态电压/频率特征系数及其所占比例,可以求得总负荷的静态特征系数为:
式中:ρpi、ρqi分别为第i 组负荷(i=1,2,…,n)有功功率Pi、无功功率Qi占总有功负荷P∑、总无功负荷Q∑的比例,即ρpi=Pi/P∑、ρqi=Qi/Q∑;Kupi, Kuqi, Kfpi, Kfqi分别为第i 组负荷有功、无功功率的电压、频率特征系数。
2.2 DG 对静态特征系数的影响
假设无DG 出力时系统的负荷有功功率静态电压特征系数为KupL,电压扰动后有功功率变化量为ΔPL,PL为总负荷功率,则有:

即

考虑DG 以功率因数1 投入运行(无功功率QG=0),令DG 有功出力PG<PL,即净负荷功率P0仍由PET 从主网获得,为

DG 作为独立电源,其有功出力PG不受系统电压变化的影响,静态电压特征系数KupG=0,即在电压扰动时PET 低压侧功率变化ΔP=ΔPL,则DG 投入系统后负荷有功静态电压特征系数Kup为

将式(17)、(19)代入式(20)中,可得:

将上述各式中的电压变量转换为频率变量,可知DG 对负荷频率系数的影响与电压相同。若同时考虑电压及频率特性,对应柔性可调节负荷有功总容量为

根据上述分析可知,当DG 投入系统运行时,由于净负荷P0的减小,Kup、Kfp会随着PG的增加而增大。因ΔP=ΔPL,在一定的电压、频率变化范围内,DG 渗透率的大小不影响柔性可调节负荷容量ΔP 的大小;但如果不考虑DG 对负荷辨识系数的影响,即认为Kup等于KupL,代入式(22)可知,在计算负荷调节区间ΔP 时净负荷的减小将导致该数值计算有误(变小),影响电网的功率需求侧响应。DG 出力对静态特征系数及可调节负荷容量的影响将在3.2 节详细阐述。
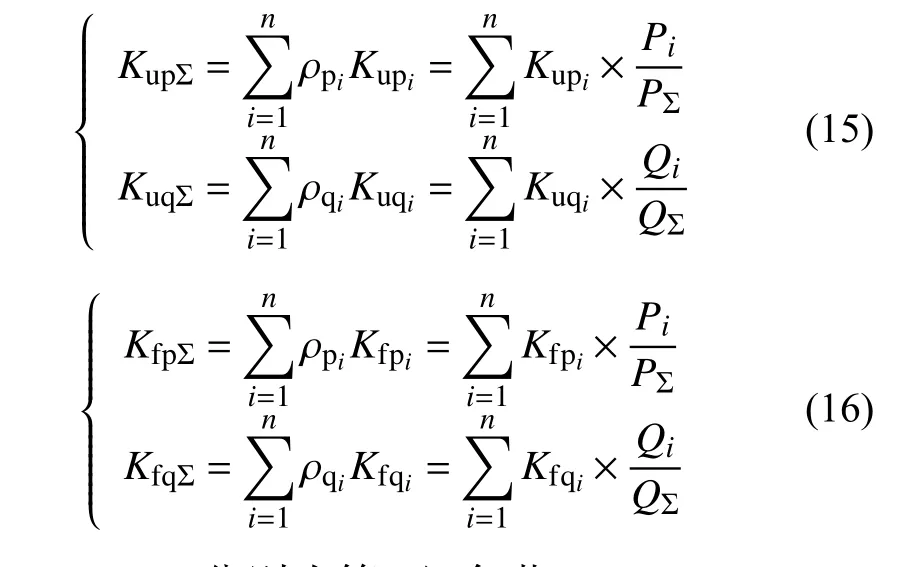
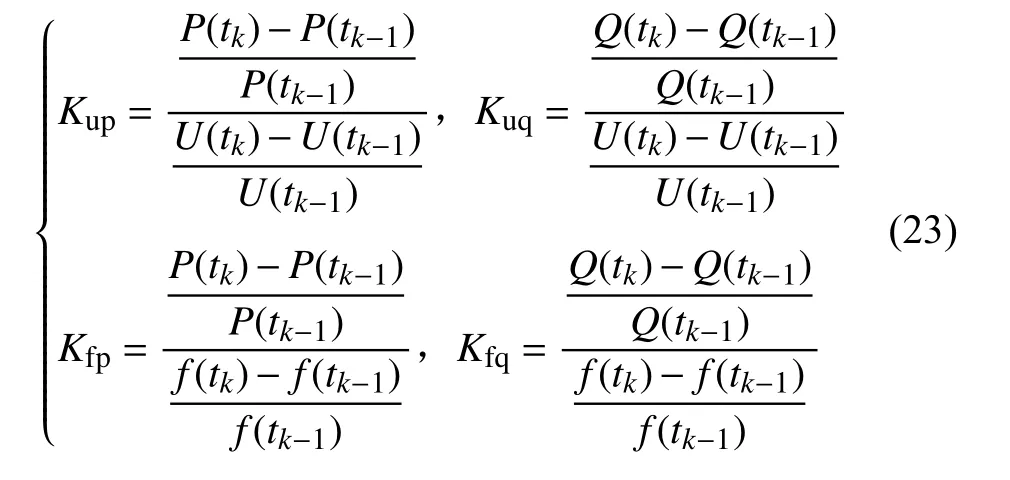
2.3 负荷灵敏度在线辨识
负荷灵敏度在线辨识是一种新的负荷建模方法,解决了传统负荷建模的时变性、确定性等问题。本文根据式(10)—(11)的离散式(式(23)),搭建了用于实现负荷电压/频率系数辨识的模型,即通过控制PET 负荷侧VSC 的电压、频率实现坡度变化,在变化期间取适当时间间隔内对应的电压、频率及功率测量值代入式中,计算负荷电压、频率特征系数平均值。
其辨识流程图如图2 所示。
2.4 负荷灵敏度辨识方法的应用
根据图2 所示的静态特征系数辨识流程图可以实时获得系统负荷模型参数,不仅解决了传统负荷模型“典型参数”与实际电网的适应性问题,还为电网的调度运行提供辅助服务。如降压节能技术、柔性减载、PET 过载控制等,根据在线辨识方法,实时掌握功率对电压及频率的敏感度,准确判断柔性负荷可调节区间,评估可卸除的负荷位置及大小,对于节约能源、避免停机和工业生产中断等都具有至关重要的作用[17]。

图2 静态特征系数辨识流程图Fig.2 Flow chart of static characteristic coefficient identification
本文以柔性减载为例,如在峰荷时期,系统调度员给出减载指令,根据实时辨识得到的负荷模型,利用PET 协调电压及频率变化,实现柔性负荷控制。附录图A4 为系统电压/频率协调控制策略图[18],本文以CVR 技术定义的标准电压范围作为系统的可调节电压区间(0.95 pu~1.05 pu),保证降低电压时,在不对用户设备造成伤害的同时达到降低系统负荷需求与减少系统能量损耗的目的;系统频率可调节区间为49.8~50.2 Hz。
将上述PET 电压/频率协调控制策略应用在柔性减载中,得到图3 所示的具体控制流程图。其中ΔPL_order为系统功率调度需求;ΔPL_fmax、ΔPL_Umax分别为系统在频率和电压可调节范围内的最大柔性负荷调节量。根据系统减载要求及系统在线辨识得到的负荷特征系数,计算PET 输出交流电压及频率的可调节量,并在可调节范围内调节电网电压及频率,最终实现柔性减载。
由于频率可调节范围比电压调节范围小,且频率控制对功率调节作用较弱,因此协调控制中先进行频率调节,在频率可调节范围内无法实现系统功率变化要求时,再引入电压调节,以此提高系统柔性负荷容量,并为主网提供一个柔性可调节的主动负荷,响应微电网的需求侧管理。
3 系统仿真验证
利用Matlab/Simulink 软件搭建基于PET 的电网仿真平台,对文中提出的负荷静态电压、频率特征系数辨识方法进行验证;同时利用在线辨识所得的负荷模型,对PET 进行电压/频率协调控制,响应系统功率调度需求。
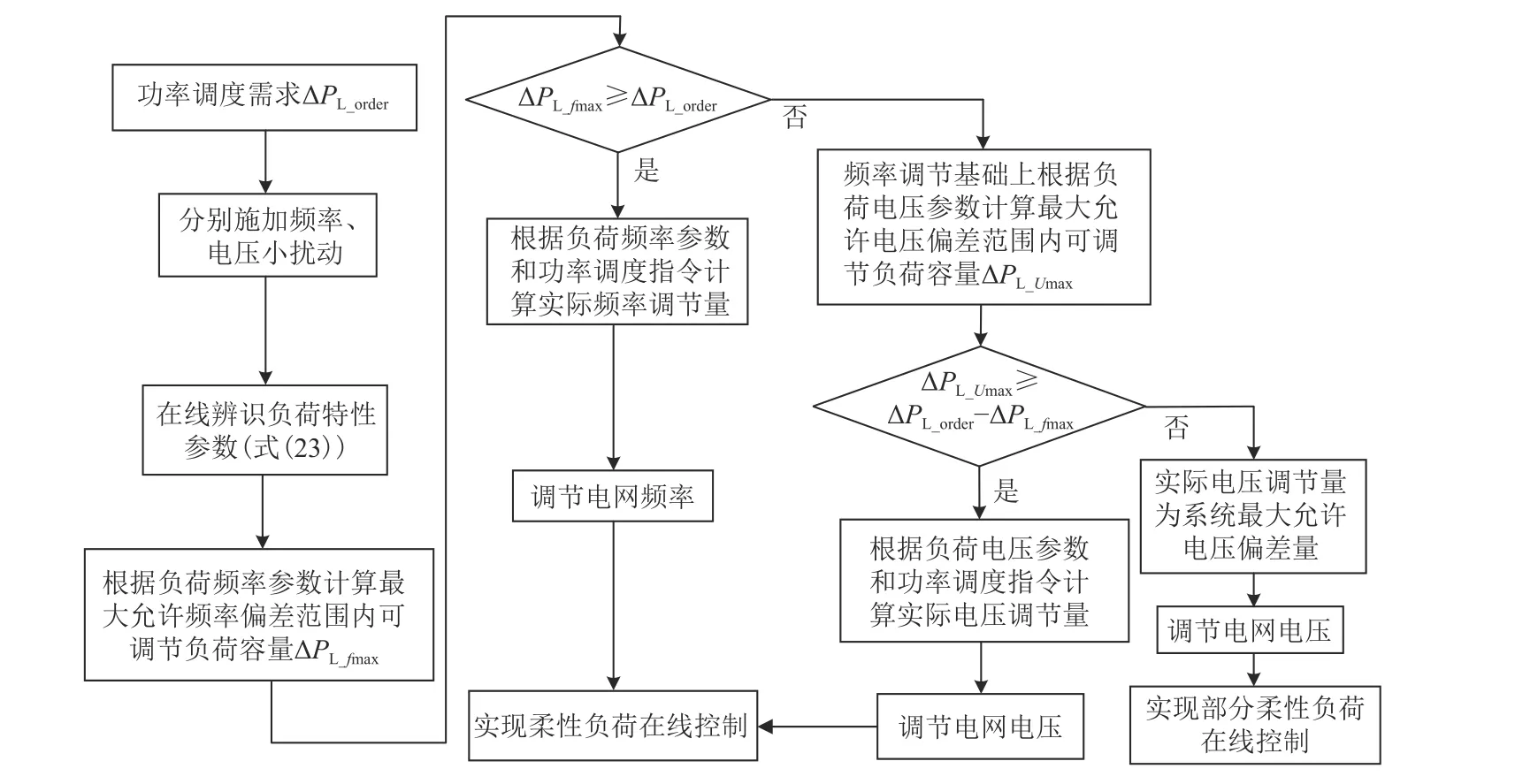
图3 柔性负荷控制整体流程图Fig.3 Overall flow chart of flexible load control
3.1 负荷静态特征系数辨识结果验证
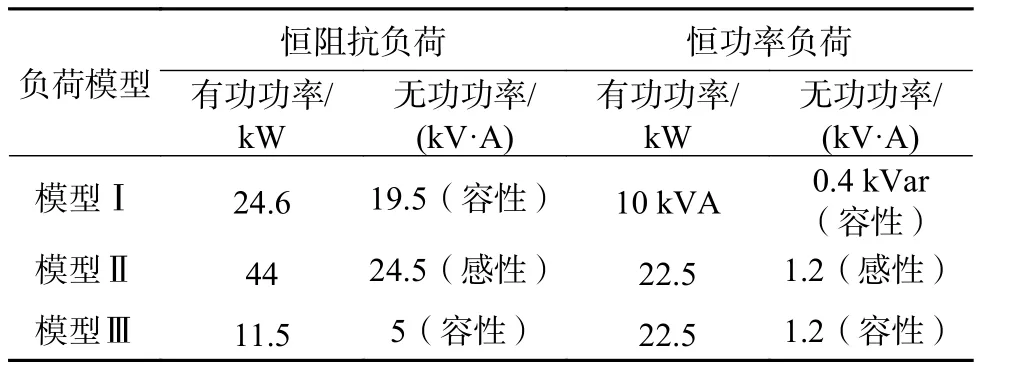
根据图2 搭建负荷静态电压、频率特征系数辨识模型,对不同负荷模型进行参数辨识,将辨识结果与理论计算值进行对比,验证辨识方法的准确性。附录表A1 为PET 参数(参数符号与图1对应),附录表A2 为不同负荷模型参数。
对负荷频率及电压特征系数进行辨识,控制低压侧电网频率fref和低压侧交流电压U*sabc变化。首先令低压侧频率fref在第1.5~1.7 s 间从50 Hz 呈线性减小0.2 Hz,然后持续0.6 s,在2.3~2.5 s 恢复至初始频率值;之后令低压侧电压U*sabc标幺值在第3~3.5 s 间从1 pu 线性跌落0.02 pu,持续1 s 后,在4.5~5 s 恢复至初始电压值。负荷模型Ⅰ频率、电压扰动情况以及在以上变量扰动下的功率波形及特征系数辨识结果如图4 所示。
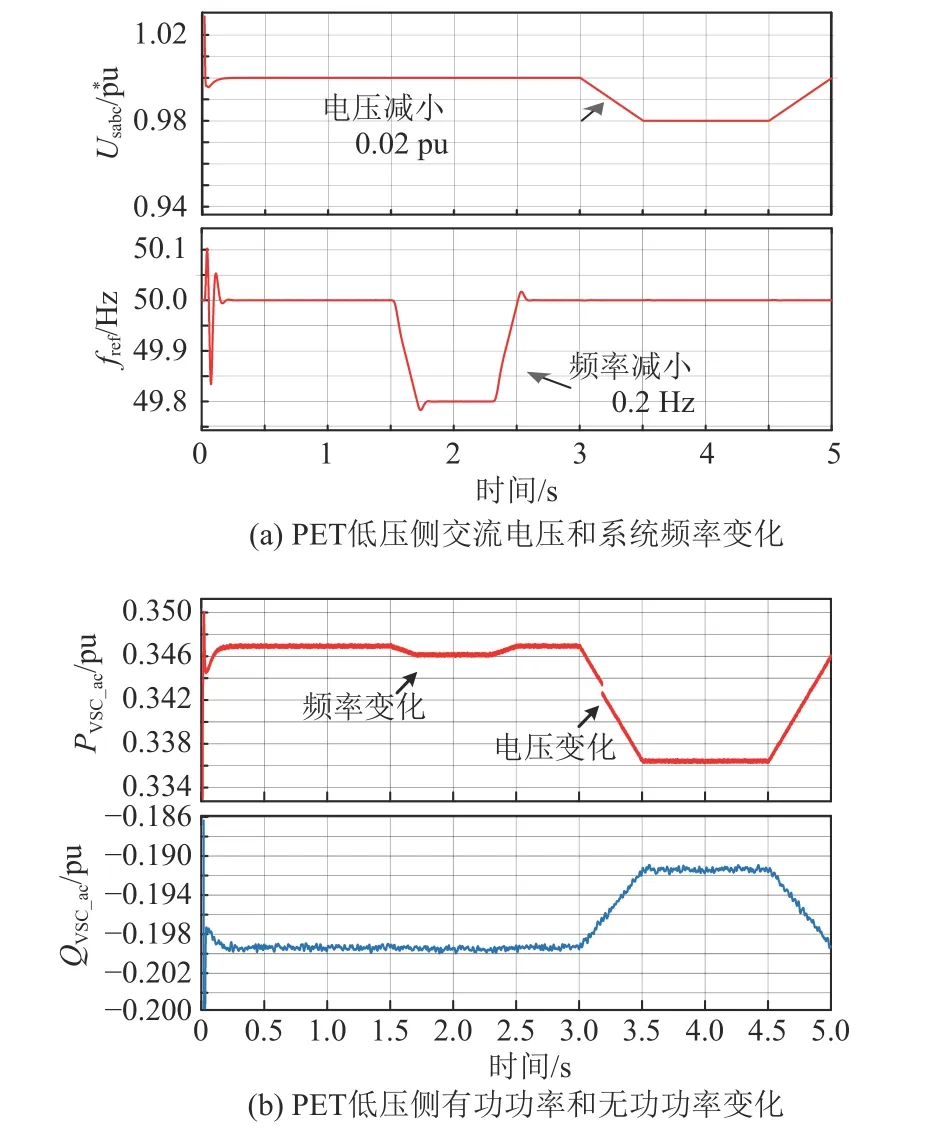
图4 频率减小0.2 Hz、电压跌落0.02 pu 时仿真波形(负荷模型Ⅰ)Fig.4 Simulation waveforms under frequency fall of 0.2 Hz and voltage sag of 0.02 pu (as for load model I)
图4 (a)为PET 低压侧交流电压和电网频率的变化波形,其变化情况与指令一致;图4(b)为低压侧负荷功率变化波形,可见在频率、电压跌落区间内功率能够较好地响应频率、电压变化。利用式(23)对图4(b)功率变化进行辨识,其参数辨识结果见表1 所示。
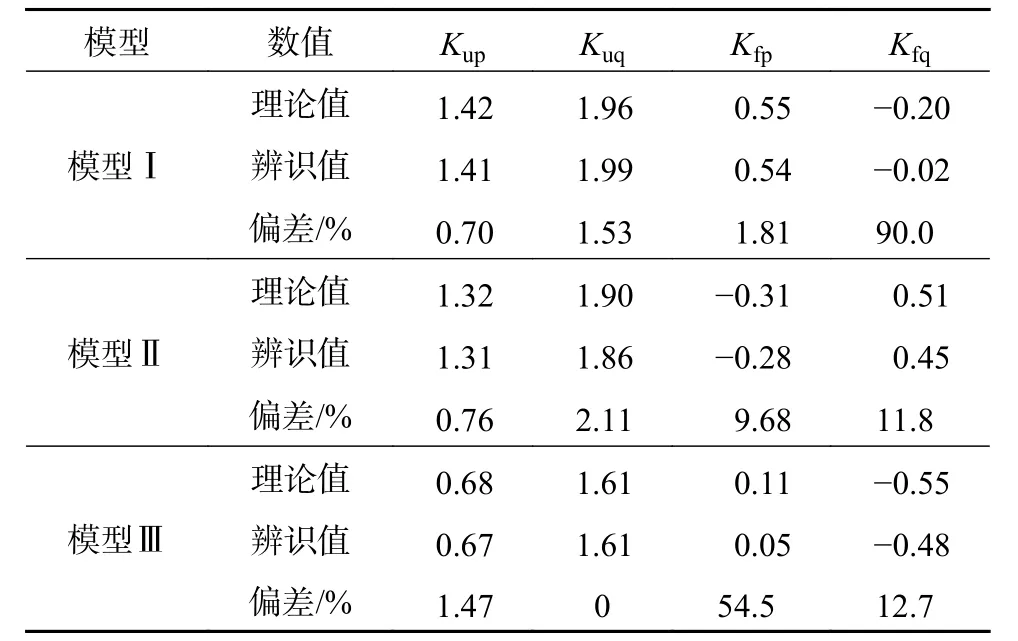
表1 静态特征系数理论值与辨识值Table 1 Theoretical value and identified value of static characteristic coefficient
表1 还给出了在频率减小0.2 Hz、电压跌落0.02 pu 时,其他2 组负荷模型的静态频率、电压特征系数辨识结果与理论结果的对比,其理论值可由附表A2 中不同负荷参数结合式(12)—(16)计算获得。
由表1 中数据可知,仿真辨识得到的负荷静态电压、频率特征系数与理论值接近相同,验证了负荷灵敏度在线辨识方法的准确性。
3.2 DG 对负荷静态特征系数的影响
根据式(21)可知,不同渗透率的DG 出力会影响负荷静态特征系数,且对电压及频率的影响效果相同。图5 给出了负荷模型Ⅰ在频率减小0.2 Hz以及电压跌落0.02 pu 时DG 对负荷参数辨识结果的影响。
由图5(a)可知,负荷静态电压/频率特征系数会随着DG 渗透率的增加而增大,且渗透率越高,变化幅度越大;参数仿真辨识值与理论计算值偏差小于10%,在渗透率大于60%时偏差较大,最大偏差为20%,数值总体较为接近。由此可知,本文负荷灵敏度在线辨识方法对于含DG 的电网同样适用。
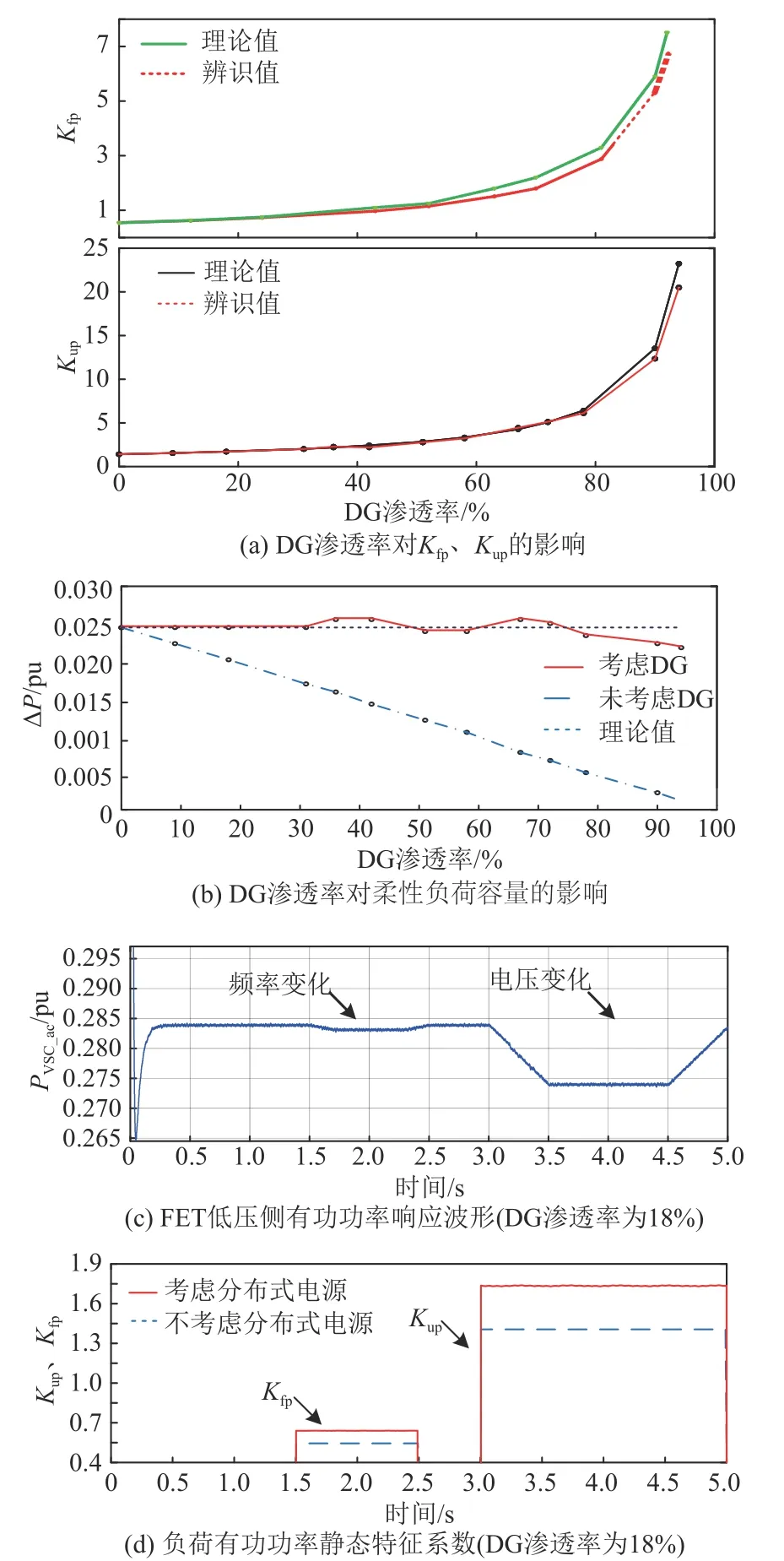
图5 DG 对柔性负荷容量及静态特征系数的影响Fig.5 Influences of DG on flexible load capacity and static characteristic coefficients
图5 (b)给出了负荷模型Ⅰ分别在考虑与不考虑DG 出力时对负荷参数的影响,即随着DG 渗透率的增加,在允许频率及电压变化范围内(49.8~50.2 Hz,1.05 pu~0.95 pu)对应柔性可调节负荷总容量ΔP∑的变化情况。经参数辨识可知,负荷模型Ⅰ对应柔性可调节负荷总容量为0.025 pu(由附录表A2、表1 中负荷模型Ⅰ对应参数结合式(22)计算可得)。从图5(b)中可以看出,利用在线辨识方法(即考虑DG 影响),得到的不同渗透率下柔性负荷容量接近为常数0.025 pu,符合理论分析结果;如果不考虑DG 对负荷参数的影响,即认为电压、频率系数不变,由于系统净负荷的减小,将导致计算所得的可调节负荷容量随渗透率的增加而降低,影响系统调度员的判断。综上分析可知,DG 对负荷静态特征系数存在影响,且在线辨识方法适用于含分布式电源的微电网(即考虑了DG 的影响),表明了负荷参数在线辨识的必要性。
图5(c)给出了负荷模型Ⅰ在光伏渗透率为18%的情况下考虑DG 影响时的负荷有功功率变化,与图4(b)有功功率波形对比可以看出:由于DG 出力,流入负荷侧的有功功率减小,即净负荷减小,减小值对应DG 出力值;图5(d)给出了负荷模型Ⅰ在光伏渗透率为18%时,考虑DG 和不考虑DG 2 种情况下有功功率静态特征系数的对比,可以看出,负荷有功功率静态特征系数会随着DG 出力相应增大。
3.3 负荷灵敏度在线辨识应用
本节利用在线辨识所得的负荷模型,参与含有PET 的系统调度。以柔性减载控制为例,当系统接收到微网侧的功率调度指令(−0.05 pu)时,给PET 低压侧VSC 分别施加一个交流电压小扰动(−0.02 pu)和一个短时频率小扰动(−0.2 Hz),以实时辨识系统负荷静态电压、频率特征系数。由于是短时小波动,对电网稳定性不会造成影响;再将辨识得到的负荷参数和功率变化需求代入式(10)—(11)计算实际电压、频率调节量进行电压/频率协调控制,最终实现柔性减载。
对于本文搭建的系统仿真模型,额定功率为100 kW,负荷功率标幺值为0.625 pu,在线辨识得到的有功功率静态电压特征系数为1.95,频率特征系数为−0.25。系统低压侧初始稳态电压标幺值为1,频率为50 Hz,则在最大频率调节范围(±0.2 Hz)和电压调节范围(±0.05 pu)内,对应可调节负荷区间占总负荷的6.2%,相比较仅考虑电压调节,可实现6.1%的调节区间增大了0.1%的可调节容量。当有功功率调度需求为−0.05 pu 时,系统低压侧交流电压、频率波形及负荷有功功率跟踪情况如图6 所示。
系统功率调度要求在6~8 s 区间负荷有功减载0.05 pu。图6(a)、(b)分别为系统频率、交流侧电压变化波形,在1~5s 为提前设定的频率、电压扰动响应,用以进行负荷系数在线辨识,在6~8 s区间是根据辨识结果及功率指令计算得到的实际频率、电压变化响应,由图可知频率会增大0.2 Hz、电压会降低0.04 pu;图6(c)为根据设定的小扰动辨识得到的负荷电压及频率特征系数值Kup、Kfp;图6(d)为根据负荷辨识系数及功率调度指令响应的系统负荷有功功率波形,可以看出6~8 s 在电压及频率的共同调节下,负荷功率最终降低了0.05 pu,满足系统调度需求,实现了利用负荷灵敏度在线辨识为主网提供一个柔性可调节主动负荷的作用。

图6 柔性负荷控制仿真波形Fig.6 Simulation waveforms of flexible load control
4 结论
1)本文利用PET 注入电压和频率扰动实现负荷特性参数在线辨识,在得到精确负荷模型的基础上,通过PET 电压及频率的协调控制,增大了系统柔性负荷的可调节容量。
2)分布式电源的接入会影响负荷参数辨识结果,若忽略该影响将使得柔性负荷的可调节容量变小。仿真算例表明,本文的负荷参数在线辨识方法对于含分布式电源的微网同样适用,同时也说明了负荷在线辨识的必要性。
3)在准确判断柔性可调节区间的基础上,PET 通过所提出的电压/频率协调控制策略,能够在兼顾供电电能质量的前提下实现负荷柔性控制,以满足系统优化运行的需求。
本文仅考虑了PET 独立控制微电网电压和频率的情形,鉴于下垂控制也是微网中常用的协调控制策略之一,后续研究将进一步考虑下垂控制对负荷在线辨识方法的影响,以提升负荷灵敏度在线辨识方法的适用性。
附录A

附图A1 AC/DC/AC 型PET 拓扑结构Fig.A1 Topology of AC/DC/AC type PET
附图A2 VSC 双闭环控制Fig.A2 Double loop control of VSC
附图A3 系统频率控制Fig.A3 Frequency control of system

附表 A1 PET 参数Table A1 Parameters of PET

附图A4 电压/频率协调控制策略图Fig.A4 Strategy diagram of voltage and frequency coordination control
附表 A2 负荷模型参数Table A2 Load model parameters
(本刊附录请见网络版,印刷版略)
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
云南画报(2021年8期)2021-11-13
汽车维修与保养(2021年8期)2021-02-16
文化创新比较研究(2020年7期)2021-01-13
工业设计(2016年4期)2016-05-04
电子设计工程(2015年15期)2015-02-27
上海金属(2013年6期)2013-12-20
汽车与新动力(2013年1期)2013-03-11
