
车辆平行泊车系统路径规划与控制研究
2021-03-01 02:45杨太旗李永超
机电工程技术 2021年1期
刘 虎,杨 嘉,杨太旗,武 凯,李永超
(长安大学工程机械学院,西安 710064)
0 引言
随着汽车保有量持续增加,随之而来的“泊车难”问题也日益显现,在停车规划路径时往往不考虑避障约束和曲率分析,造成路径曲率不连续甚至发生碰撞事故。因此,分析和掌握避障路径规划和曲率优化是解决自动泊车系统的首要任务。
国内外对平行泊车轨迹做了大量研究。Kim D等[1]设计了圆弧直线路径,但路径中存在曲率不连续点;王芳成[2]设计了四步骤平行泊车路径,但需要多次停车转向;张家旭等[3]采用回旋曲线设计泊车路径,实现路径曲率连续;张持等[4]和穆加彩等[5]用反正切函数拟合泊车路径;姜立标等[6]用B 样条曲线规划了泊车路径,使得路径曲率满足要求,但对避障约束分析较少。
上述文献虽然规划了泊车路径,但是没有考虑到车辆避障约束和路径曲率的优化,因而在路径安全性和曲率约束上存在一定问题。
本文将从路径规划和曲率优化两个方面建立平行泊车路径规划体系。基于车辆轨迹避障约束,分析了路径中的碰撞约束,设置安全系数,保证车辆安全进入泊车位。针对车辆路径轨迹不连续的问题,提出用五次多项式进行路径曲率优化。最后,针对泊车路径轨迹进行分析,验证其准确性和有效性。
1 泊车运动学模型及相关参数
车辆在泊车过程中处于低速,将车辆看成一个刚体,后轴无侧向滑动,将后轴中心点坐标看做车辆的运动坐标,建立车辆的运动学模型[7]。车辆后轴中心点的轨迹是由一段段圆弧组成,这是规划泊车路径的基础。
本文以某款汽车为研究对象,其特性基本参数如表1所示。
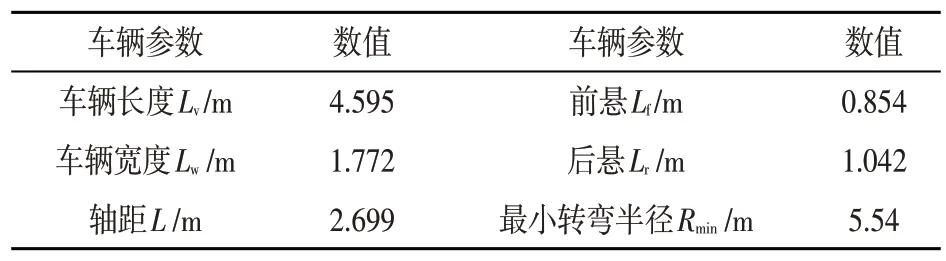
表1 车辆参数表
2 泊车轨迹规划及避障研究
本文采用两圆弧相切法规划泊车路径,车辆在起始位置M2回正姿态,转动方向盘,以半径R2运行至M1后,停车左转方向盘,以半径R1运行至M0点,最终顺利停入泊车位[8]。整个泊车过程可以理解为以O1O2为圆心,半径为R1R2的两段相切圆弧组成的轨迹。以车位顶点A为坐标原点建立坐标系,车辆在泊车过程中路径示意图如图1所示。

图1 泊车两圆弧相切轨迹示意图
有几何关系确定两圆弧半径和如下式所示:

式中:S0、H0分别为车辆起始点与目标点之间X轴方向和Y轴方向上的距离。
当确定了泊车起始点坐标位置后,两圆弧相切法确定的半径R1和R2的和为定值。分析泊车过程中的碰撞约束,结合Rmin确定R1和R2的范围,对R1和R2任意一个赋值,另外一个也随之确定,从而泊车轨迹唯一确定。本文采用逆向方式分析泊车路径,即将车辆泊车看做由M0驶出到达M2的过程,在此基础上分析车辆运动过程中的避障约束,可以求得两圆弧路径的相关参数及泊车位宽度和长度的极限值。
2.1 圆弧R1中的碰撞约束
圆弧R1中有2个碰撞约束,第一是车辆从泊车位M0起步时,右后点a与AB发生碰撞,此约束确定泊车位宽度最小值Wmin,碰撞位置如图2所示;第二是驶出泊车位时,右前顶点b与顶点C发生碰撞,此约束确定位长度的最小值Lmin和R1最大值R1max。碰撞位置如图3所示。
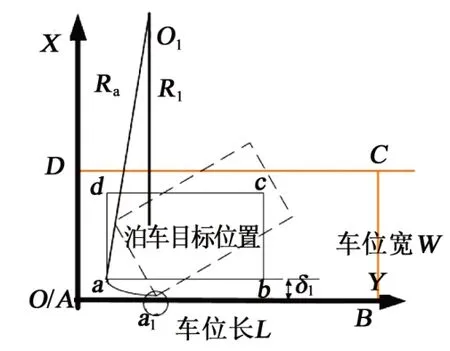
图2 第1种碰撞约束

图3 第2种碰撞约束
当车辆以最小转弯半径Rmin行驶时,此时满足避障约束的泊车位宽度为极限最小值,由几何关系推导得,右后顶点与车位下边界不发生碰撞约束的条件如下式所示:

式中:Ra为车辆右后顶点转弯半径;Lw为车宽;W为泊车位宽度。
考虑车辆泊车入位时与边界AB 的安全距离δ1,取δ1为0.2 m代入得Wmin=2.056 m。
对于第2类碰撞约束,当车辆以最小转弯半径行驶时,此时满足碰撞约束的泊车位长度Lmin为极限最小值。设转弯半径圆心O1到车位上边界CD的距离为Lya,考虑安全距离δ2和δ3,取δ2和δ3均为0.2 m,泊车位长度的最小值Lmin如下式所示:

式中:Rb为车辆右前点转弯半径;Lr为后悬。
由此计算得到的泊车位长度为极限最小值,代入数据计算得Lmin=7.189 m。
根据实际泊车情况,在计算Wmin和Lmin的基础上,适当放大泊车位长度,选取实际泊车位宽度为2.4 m,泊车位长度为7.5 m。在计算实际泊车位长度后,需要在满足避障约束的前提下,计算圆弧1的半径最大值R1max,圆弧半径R1满足下式:

式中:Lreal、Rbreal、Lyareal均为实际尺寸。
代入数据计算得圆弧1 的半径最大值R1max为7.557 m。车辆在泊车过程中也受自身结构的约束,转弯半径不能小于最小转弯半径Rmin,综上,圆弧半径R1的选取范围为[R1min,R1max]。
2.2 圆弧R2中的碰撞约束
圆弧R2中也存在2种碰撞约束,第3种为车辆出库后,后轴延长线与车身交点p与前车位边界点C发生碰撞,可以确定圆弧2的最小转弯半径R2min1,碰撞位置如图4 所示。第4 类为车身左前点C 与道路边界发生碰撞,可以确定车辆以圆弧2泊车时的最小转弯半径R2min2,碰撞位置如图5所示。
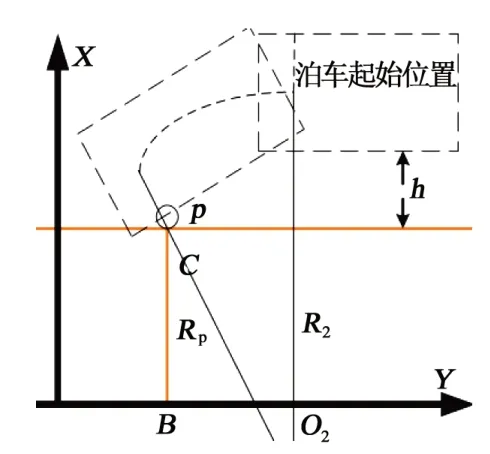
图4 第3类碰撞约束
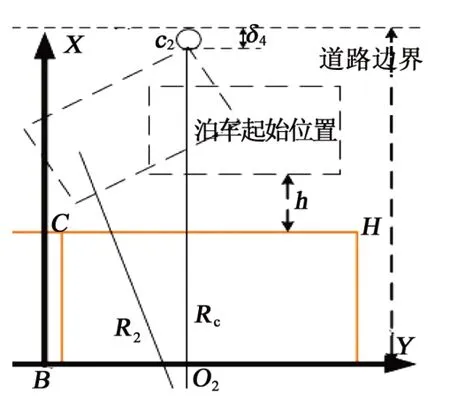
图5 第4类碰撞约束
对于第3类碰撞约束,由几何关系得不发生碰撞的条件如下式所示:

式中:S 和L 分别为泊车起始点的横纵坐标;h 为起始位置车辆下边界与车位边界的距离。
本文取车辆泊车起始位置坐标为(10.742,4.286),即S=10.742 m,h=1 m。代入公式计算得R2>6.642 m,所以由第3类碰撞约束确定的R2min1为6.642 m。
对于第4类碰撞约束,道路边界距离坐标X轴的距离为H,车辆以圆弧2泊车时不与道路边界发生碰撞的条件如下式所示:

式中:Rc为车辆左前点的转弯半径;H为道路边界距离坐标X轴的距离。
取δ4为0.2 m,道路边界距离H 为6.2 m,代入上式计算得R2>6.323 m。由第4 类碰撞约束确定的R2min2=6.323 m,圆弧2的半径R2选取范围如下式所示:

综上所述,由以上4种避障约束分析,计算得到车辆的泊车位宽度和长度,以及R1和R2的范围。对R1和R2任意一个赋值,从而确定唯一的泊车轨迹。本文设定R1=7 m,R2=9.669 m,通过Matlab仿真得到起始点坐标为(10.742,4.286)的两圆弧泊车路径如图6所示。
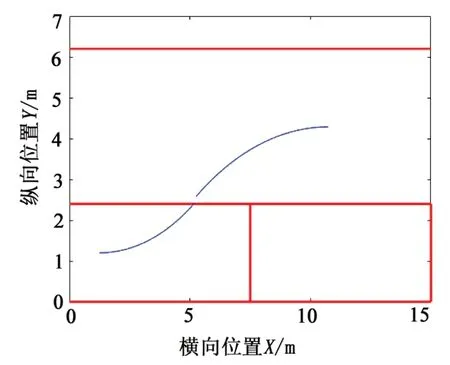
图6 两圆弧轨迹仿真图
3 五阶多项式函数拟合路径
由车辆运动过程分析可知,车辆在两圆弧相切点存在停车转向,该过程会使泊车过程不连续且加剧轮胎的磨损,在实际泊车过程中应尽量避免这种情况[9]。本文选用五次多项式对平行泊车路径进行优化。五次多项式的基本表达式如下:

式中:a5、a4、a3、a2、a1、a0分别为多项式的6个参数。6 个未知参数至少需要6 个方程来求解。五次多项式经过目标点(x0,y0),且在该点处一阶二阶导数均为0,过切点(x1,y1),过起始点(x2,y2),且在该点处斜率为0。由此得到的6个方程可以用来求解参数。
经过仿真计算得,泊车轨迹如图7所示,路径曲率如图8所示。从图中可以看出,五阶多项式较好拟合了两圆弧相切轨迹,且满足在起始点和终止点处车辆姿态的要求,可以进行平稳安全的泊车操作。
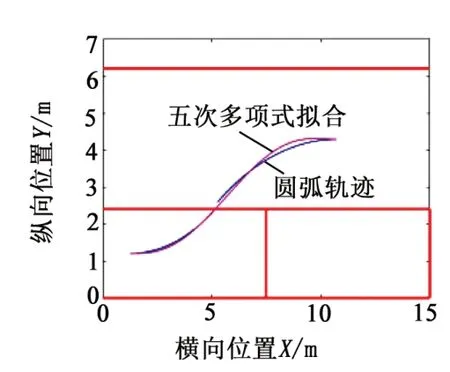
图7 五次多项式拟合图

图8 五次多项式路径曲率图
4 结束语
本文采用两圆弧轨迹规划了平行泊车路径,通过分析车辆泊车过程中存在的碰撞约束,确定了泊车位和圆弧轨迹的相关参数。针对圆弧轨迹中曲率突变的问题,本文提出用五次多项式拟合路径的方法,改善了路径中存在的曲率突变。
最后根据仿真结果表明,五次多项式较好地拟合了圆弧轨迹,在起点和终点处曲率均为0,表明车辆泊车车身姿态角摆正。基本满足了车辆泊车要求,安全平稳从起始位置泊车入位。而在起始位置车身姿态角倾斜方面,可以开展倾斜初始位姿的平行泊车路径规划研究。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
汽车实用技术(2022年19期)2022-10-19
数学物理学报(2022年4期)2022-08-22
汽车实用技术(2022年7期)2022-04-20
建材发展导向(2022年4期)2022-03-16
科学技术创新(2020年6期)2020-04-18
军民两用技术与产品(2020年3期)2020-04-07
数学物理学报(2019年5期)2019-11-29
制造技术与机床(2017年3期)2017-06-23
西安建筑科技大学学报(自然科学版)(2014年1期)2014-11-12
