
考虑人工驾驶的动车组列车节能运行优化
2021-06-24 16:37潘洋符卓
铁道科学与工程学报 2021年5期
潘洋,符卓
(中南大学 交通运输工程学院,湖南 长沙 410075)
交通运输系统能源使用效率的提高吸引了政府和学者等各个方面广泛的兴趣[1]。随着我国铁路网规模的不断扩大以及动车组开行比例的增加,减少列车牵引能耗成为铁路节能的关键。张惠茹等[2]以列车能耗和列车时刻表稳定性为目标函数,提出了富余时间分配求解算法,通过调整列车在中间站的到发时间以节省列车在站间运行的能耗。CARVAJAL 等[3]提出充分利用惰行工况节省能耗,并对列车速度与前车速度相关的不确定性进行了建模。麻存瑞等[4]提出可调节区间运行冗余时间的高速列车多区间节能操纵模型,模型考虑枢纽站与非枢纽站对列车到达时刻准点性的不同要求,并设计三层编码的遗传算法求解模型。FERNAN‐DEZ 等[5]针对列车延误提出动态多目标优化模型,在列车运行的过程中寻找节能的速度曲线。汤旻安等[6]以多质点模型为基础研究最小能耗的动车组列车运行控制,通过2次优化得到列车最终的节能运行曲线。YE 等[7]将列车节能运行问题描述为多相位最优控制问题,模型考虑了复杂的列车运行条件、停留时间等约束。现有研究大多考虑改进列车节能控制策略或与列车时刻表协同优化获得列车理想的节能运行曲线。理想的节能运行曲线与列车实际运行曲线往往存在一定的偏差。较少研究涉及列车驾驶员实现驾驶命令时存在的不确定性。本文考虑人工驾驶的特点,应用模糊数对人工驾驶的不确定性进行建模,并针对问题采用基于稀疏度的局部搜索NSGA2 算法实现优化过程。
1 节能驾驶策略
现有研究[8]表明,列车采用无制动保持速度的驾驶策略能有效减少能耗。列车通过适当的牵引力保持一定的速度。如果列车需要制动来维持速度,列车采取惰行工况;如果列车需要减速使其不超过区间限速,优先采取惰行工况,必要时才采取制动工况。
考虑人工驾驶的特点,列车在区间运行过程中允许出现多个不同区段的无制动保持速度,以命令矩阵进行描述。
式中:xk表示不同命令区段结束的位置;vk表示第k个命令区段中无制动保持速度vk;矩阵元素中最后一行的xk为列车进入惰行或制动工况的位置,此时vk值取0。
2 模型建立
模拟计算列车运行时间及牵引能耗需要考虑列车、线路、列车驾驶策略[9]等方面。
2.1 列车运行过程
列车运行过程中受牵引力、制动力及运行阻力的共同作用。为简化计算列车被视为刚性质点,列车在区间的位置为s,列车速度和时间分别为v和t。列车运动方程如下:

式中:Fm(t)为列车牵引力或再生制动力;Fb(t)为列车空气制动力;Fr(s,v)为列车运行阻力(与线路条件、列车速度有关);a为列车加速度;M为列车质量;γ为列车回转重量系数。
列车实际运行还满足以下约束:
1)列车位置s与速度v需要满足列车在区间运行的初始条件:

式中:s0和send为列车行驶区段的起点和终点位置;T为列车在该区段的运行时间;ε为停站精度。
2) 列车牵引力或再生制动力受到列车牵引特性曲线限制。
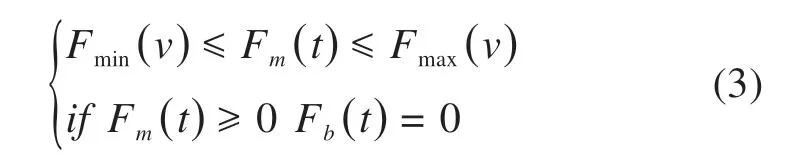
式中:Fmin(v)和Fmax(v)分别为列车在速度v下最大的再生制动力与最大的牵引力。
列车基本运行阻力依据戴维斯方程由列车速度的二次函数表示。列车坡道阻力、曲线阻力和隧道阻力计算公式参考文献[10]。
2.2 实现驾驶策略
列车驾驶策略通过闭环比例积分调节牵引力或制动力实现。前k−1个命令区段施加适当的牵引力或制动力维持列车速度,最后的命令区段列车减速至停站。
每个仿真时步的列车牵引力或制动力的控制量u(t)由以下表达式得出:

式中:uprop(t)为比例控制部分;uint(t)为积分控制部分;ts为仿真时步;kP为比例控制参数;kI为积分控制参数;e(t)为列车当前时刻速度与目标速度的差值;e(t-ts)为前一仿真时步的调节误差。
式(4)中列车目标速度vobj(t)取命令矩阵中的vk和最大允许速度vmax(t)的较小值,最大允许速度vmax(t)考虑列车所在位置的区间限速vlimt(s),列车运行至下一个区间限速的制动曲线vb(s),列车到达下一站的制动曲线vfb(s)。列车目标速度vobj(t)与最大允许速度vmax(t)由以下表达式得出:
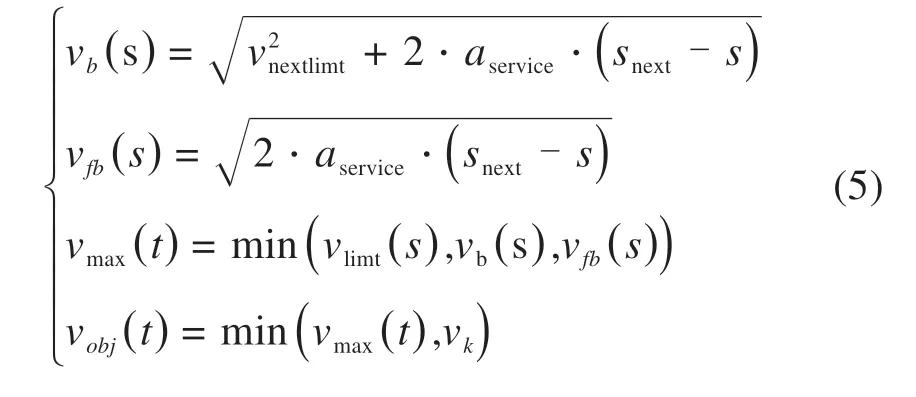
式中:vnextlimt为列车到达某位置时下一个限速区域的最大限速;aservice为列车最大减速度;snext为列车到达某位置时下一个限速区域的开始位置。
如果列车速度v(t)小于最大允许速度vmax(t)且u(t)为负数,为了实现无制动保持速度策略,此时列车牵引力或制动力的控制量u(t)取0,列车采取惰行工况。
列车实际运行中牵引力和制动力受到列车牵引特性曲线的限制,同时为了保证旅客的舒适度,考虑列车存在最大加速度和最大减速度。因此列车最终所需合力Ftotal(t)由控制量u(t)修正得到。列车最终所需合力Ftotal(t)由以下表达式得出:

式中:amax为列车最大加速度;dmax为列车最大的减速度;Fmaxacc为考虑旅客舒适度后列车在线路上达到最大加速度情况下的力;Fmaxdec为考虑旅客舒适度后列车在线路上达到最大减速度情况下的力。
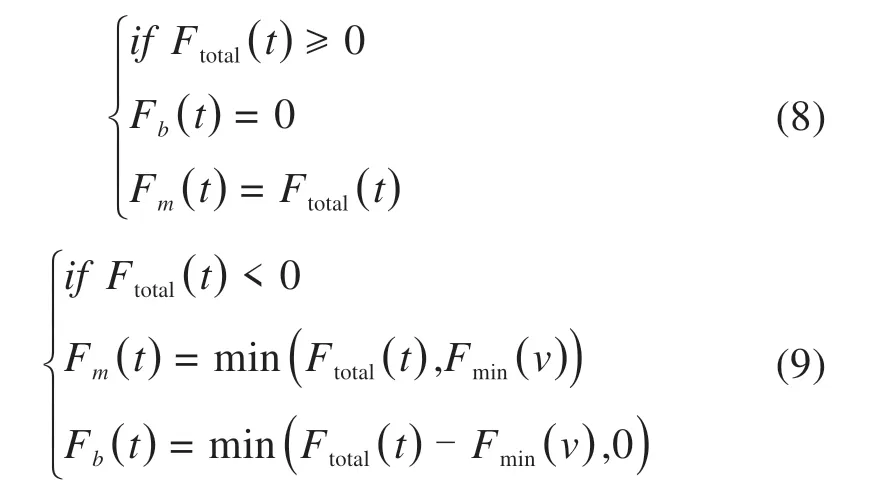
列车最终所需合力Ftotal(t)大于0 时,列车施加牵引力;列车最终所需合力Ftotal(t)小于0 时,列车施加再生制动力,当再生制动力不足时再施加空气制动力。最后牵引力或再生制动力和空气制动力由式(8)得出:
2.3 模糊命令矩阵
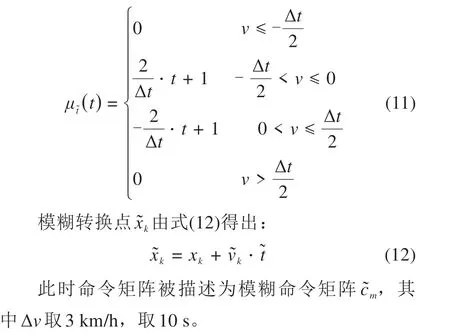
司机依据命令矩阵控制列车时,列车保持速度vk会有一定的波动。为了对这种可变性建模,列车保持速度vk用对称的三角形模糊数表示。隶属函数见下式:

另一方面,司机在命令区段转换点xk不能像预期一样精准实现命令,列车操作往往存在偏差,这就导致列车运行至命令区段转换点xk的时间与预期时间比会出现提前或延迟。故由模糊时间可以获得模糊转换点。模糊时间的隶属函数由下式得出:
2.4 目标函数
列车节能运行问题被描述为带模糊参数的多目标优化问题,目标函数包括列车运行时间和列车牵引能耗。运行时间由仿真计算得出。牵引能耗的计算考虑再生制动能的利用,由式(13)得出:

式中:Ψ1为列车再生制动能的利用率取0.1;Ψ2为列车驱动系统能耗转换率取0.85。
因此目标函数如下:

目标函数值通过式(1)~(13)可以计算得出。
3 模型求解
目标函数在该模型与约束条件下难以获得精确解,同时列车运行时间和列车能耗这2个目标函数在取最小值时往往是互相冲突的,因此考虑采用模糊非支配排序遗传算法[12]进行求解。
3.1 模糊支配
为了决定解之间的模糊支配关系和提高求解速度,先计算模糊运行时间RT和模糊能耗EC的α-截集的上下界。模糊运行时间RT的α-截集上界计算考虑2种情况:当列车下一个保持速度大于当前保持速度(vk
确定一组模糊解的最优排序应用文献[12]提出的多目标模糊支配比较方法。首先定义单目标支配关系,然后依据所有目标的支配类型定义模糊解之间的帕累托支配关系。
单目标的支配关系有以下3 种情况:总体支配、部分强支配和部分弱支配。假设三角模糊数具体的支配关系见图1~图3。
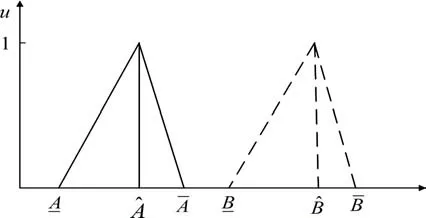
图1 总体支配Fig.1 Total dominance
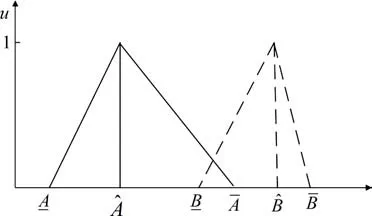
图2 部分强支配Fig.2 Partial strong-dominance

图3 部分弱支配Fig.3 Partial weak-dominance
模糊解的支配关系遵从以下规则。假设Y和Y′是2 个三角模糊解,Y模糊帕累托支配Y′的条件是Y强帕累托支配Y′或者Y弱帕累托支配Y′。其中Y强帕累托支配Y′的条件是所有的目标下Y总体支配(或部分强支配)Y′或者至少一个目标Y总体支配(或部分强支配)Y′且在其他的目标下部分弱支配Y′。Y弱帕累托支配Y′的条件是在所有的目标下Y部分弱支配Y′。
3.2 算法流程
依据实际问题设定算法参数:初始种群数量N,最大迭代次数Imax,决策变量取值的上下界Xmin和Xmax,交叉概率pc和变异概率pm,交叉参数ηc和变异参数ηm。
具体算法流程如下。
步骤1 实数编码生成初始种群:命令矩阵为决策变量,随机生成种群数目为N的初始种群kp。
步骤2 计算目标函数值:模拟计算得到种群kp中个体对应的目标函数值。
步骤3 对种群kp中所有解进行模糊非支配排序,当前种群中所有非支配解记为kc。其中拥挤度距离CD计算中的目标函数值修正为期望值E。假设三角模糊数期望值E由下式得出:

步骤4 对种群kp进行变异、交叉操作:交叉操作采用实数编码的模拟二进制交叉、变异操作采用多项式变异[13],得到变异种群Po。
步骤5 产生基于稀疏度的局部解[14]:选取当前非支配解中稀疏度最小的解作为稀疏解。稀疏度由式(16)得出:

式中:ni为目标函数空间中第i个目标向量与其他目标向量欧式距离小于r的目标向量的个数,r取值范围为0 至1。稀疏解设定后使用变异策略产生局部解。局部解的个数为种群总数的20%(取整)。
步骤6 对步骤2~步骤5 得到的所有种群进行模糊非支配排序。采取精英保留策略选取下一代种群kp。
步骤7 重复步骤2~步骤6,直到满足最大迭代次数Imax,返回此时的非支配解。
4 算例研究
以广深I 线铁路数据为案例进行分析验证。列车选用CRH1A型动车组,其编组长度213.5 m,定员载重量474 t,最大运营速度200 km/h,制动方式为再生制动加直通式电空制动。线路区段选取广州东站至东莞站,2 站站间距为62.496 km,动车组图定运行时间为1 680 s。算法中的相关参数见表1。
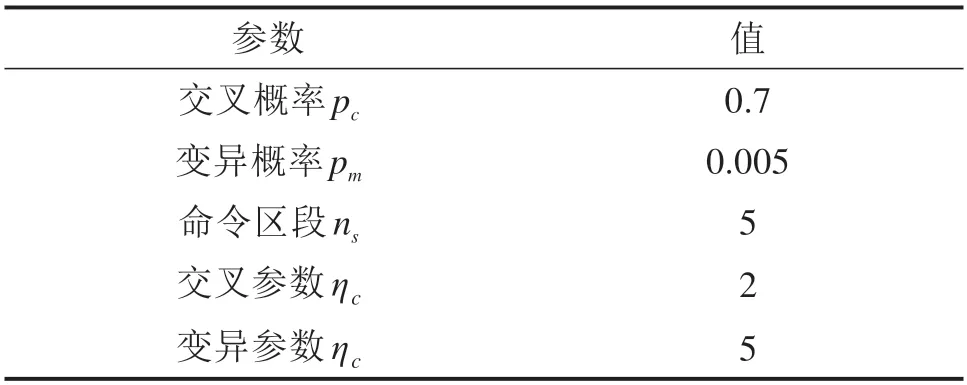
表1 相关参数Table 1 Related parameters
随机产生一定数目的命令矩阵进行仿真计算得出其列车运行时间与牵引能耗。图4为未考虑人工驾驶不确定性下非支配解与随机解对应目标函数值的散点图。算法初始种群个体数为40,最大迭代次数为60。
从图4可知:相同的运行时间,非支配解对应的能源消耗总是小于随机解对应的能源消耗。

图4 未考虑人工驾驶不确定性下非支配解与随机解对应的目标值Fig.4 Value of the objective corresponding to the nondominated solution and the random solution without considering the uncertainty associated with manual driving
图5为考虑人工驾驶不确定性后不同模糊非支配解个体数的帕累托前沿。算法的种群个体数为100,最大迭代次数为100。
从图5可知:
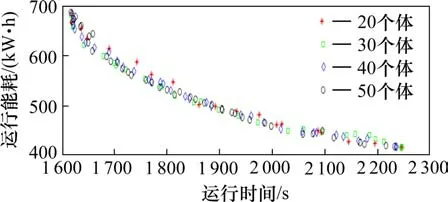
图5 不同模糊非支配解个体数的帕累托前沿Fig.5 Pareto front of the number of individuals with different fuzzy non-dominated solutions
考虑人工驾驶不确定性后的帕累托前沿与未考虑人工驾驶不确定性的帕累托前沿总体趋势一致。由于原来的非支配解与其他的解进行模糊支配比较后,其帕累托等级可能会下降,甚至出现无法比较的情况,所以帕累托前沿上的解会有所不同。
另一方面,依据最优时间−能耗曲线,协同时刻表的调整可以为列车在整个行驶过程的节能驾驶提供参考方案。
选取帕累托前沿中运行时间最接近图定时间的解,假定这样的解为现行情况下的最优解。图6为未考虑人工驾驶不确定性下的最优解所对应的速度曲线。图7为考虑人工驾驶不确定性后的最优解所对应的速度曲线。
从图6和图7可知:
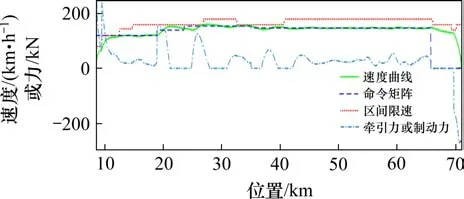
图6 未考虑人工驾驶不确定性的最优速度距离曲线Fig.6 Optimal speed profile without considering the uncertainty associated with manual driving.

图7 考虑人工驾驶不确定性的最优速度距离曲线Fig.7 Optimal speed profile considering the uncertainty associated with manual driving
2 种情况下最优解所对应的列车速度距离曲线都符合区间限速的要求。列车速度都维持在命令矩阵中无制动保持速度vk的一定范围内。
同时2种情况下列车的牵引力或制动力曲线没有出现急剧变化的情况,比较符合实际操作。列车行驶过程中出现多次的惰行工况,此时列车速度在原有基础上小幅度增加,但都没超过区间限速,实现了无制动保持速度的驾驶策略。
依据多变量测算能耗模型[15],该区段列车牵引能耗的测算值为678 kW∙h。最优解对应的目标函数值见表2。

表2 目标函数值Table 2 Objective function value
从表2可知:
未考虑人工驾驶不确定性时可以得到与图定时间相同的最优解,该解节省能耗百分比为7.8%,考虑人工驾驶不确定性后最优解的运行时间与图定时间的误差在0.4%以内,节省能耗百分比为6.7%,节能效果均明显。
算法的评价函数采用种群多样性指标I和超体积指标HV。I值越小则解的分布特性越好,HV值越小则解的质量越好。指标计算取10 次实验的平均值。其中指标I由下式得出:
式中:df和dl为帕累托末端解与所得解集边界之间的欧式距离,di(i=1,2,…,N−1)为所获得的非支配解之间的欧式距离,dm为所有di的平均值。表3 列出了算法不同情况下获得的I值。
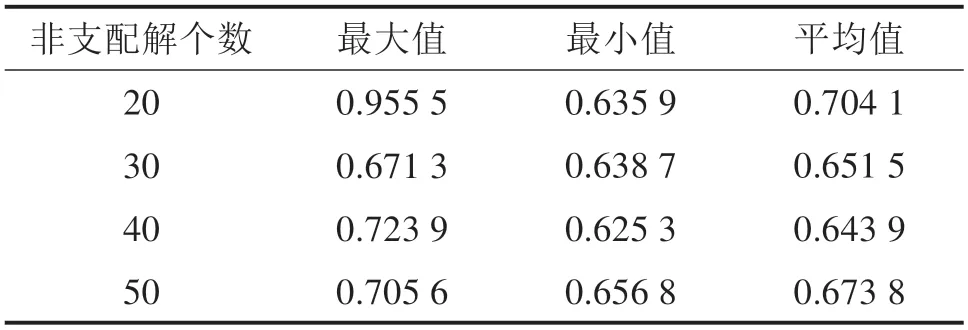
表3 不同情况下的I值Table 3 Value of I in different situations
指标HV由式(18)得出:
从图8 可知:非支配解个数为40 和50 时算法得出的解质量更好,迭代次数大于50时HV值趋向稳定。

图8 不同模糊非支配解个体数的HV值Fig.8 HV value of the number of individuals with different fuzzy non-dominated solutions
5 结论
1) 提出基于仿真的动车组列车节能运行优化模型。考虑线路坡度、曲线、限速等约束条件,应用无制动保持速度作为节能驾驶策略,结合人工驾驶的特点,以命令矩阵的形式实现节能驾驶策略。由于驾驶员应用命令矩阵时总是存在一定的偏差,因此对人工驾驶的不确定性进行建模。最后采用基于稀疏度的局部搜索NSGA2 算法实现优化过程。
2) 未考虑人工驾驶不确定性下算法能求解出运行时间与图定时间相等的列车节能运行曲线,节约能耗百分比达7.8%,节能效果较明显。考虑人工驾驶不确定性后算法能求解出节约能耗百分比为6.7%的列车节能运行曲线,且运行时间与图定时间的偏差较小。
3) 列车运行优化为离线优化,能够获得不同运行时间下的列车节能运行曲线,为列车节能时刻表的调整提供参考依据。同时列车节能运行的效果依赖于控制参数,命令区段的个数对于列车节能运行的影响都是后续研究工作的方向。
猜你喜欢
控制与信息技术(2021年2期)2021-07-23
意林(2021年9期)2021-05-28
铁道通信信号(2020年7期)2020-02-06
时代风采(2019年3期)2019-03-23
时代英语·高一(2019年1期)2019-03-13
科技创新与应用(2017年26期)2017-09-12
科技创新与应用(2017年1期)2017-05-11
中学生数理化·高一版(2016年4期)2016-11-19
Coco薇(2016年8期)2016-10-09
新民周刊(2016年20期)2016-05-25
