基于T-S模糊建模的广义预测控制系统在热工过程中的应用
2021-07-23 03:05何同祥
仪器仪表用户 2021年7期
孙 涛,何同祥
(华北电力大学 控制与计算机工程学院,河北 保定 071003)
0 引言
锅炉过热蒸汽温度是发电厂机组安全与经济运行的重要参数之一[1]。过热汽温过高或者过低都会影响过热汽温控制系统的热循环效率,甚至会造成生产事故[2]。
广义预测控制(GPC)是预测控制中最常用的控制算法,此算法有三大特点:第一,模型参数少,优化相对简单;第二,具有自适应控制的优点并且比自适应控制的鲁棒性更强;第三,分为多步预测、滚动优化、反馈校正3个部分。
模糊建模[3]就是根据已知的输入输出,建立一系列的模糊规则,辨识出被控对象的结构和参数,从而得到特定的模糊模型。此类辨识方法适用于航空航天、军工、火电厂等非线性系统的被控对象建模中。
本文先将模糊建模和预测控制相结合得到模糊预测控制算法,并通过在MATLAB软件上搭建simulink模型仿真,验证了该控制方法具有良好的动态响应特性。
1 基于T-S模糊建模的广义预测控制算法的设计
1.1 模糊辨识建模
模糊建模[4]目的是使模型的输出y(t)与系统的实际输出y(t)相同或者相近。
可将模糊辨识建模的过程分为如下步骤:第一,划分模糊集合;第二,建立模糊规则;第三,筛选模糊规则;第四,构造模糊规则域。
1.2 模糊算法的研究
1.2.1 T-S模糊辨识算法
T-S模糊模型[5]的实质是把整个非线性系统近似看成是多个线性子系统组合的模糊逼近。
设整个非线性系统表示为:

由于式(1)是一个非线性系统,因而可以利用模糊建模的方法。T-S模糊辨识的原理是由一系列的“if-then”语句来描述整个非线性系统,每一个线性子系统都可以用一个“if-then”语句来表示,这样把一系列的线性子系统组合就可以得到一个非线性系统,T-S模糊模型的形式为Ri:

其中,fi(·)取为输入变量的函数,并且由于非线性系统可以由子系统线性组合表示,即Ri可以表示为:

定义如下:
μi是第i条语句输入向量的隶属度,即:

式(4)中,∏是模糊算子,通常采用取小预算或者是乘积运算。

那么,常规T-S系统的输出为:

1.2.2 改进的模糊聚类算法的T-S模糊辨识方法
传统T-S模糊模型辨识是对前件和结论部分的参数进行联合辨识,会在一定程度上限制输入输出数据的误差,而在实际的热工过程中收集的数据误差较大。因此,本文提出了一种改进的递推模糊聚类在线辨识算法,提高了模糊建模方法对现场采集数据的容错能力以及模型辨识的精确度。
这种算法是在原有算法的基础上,每一次辨识都会对当前训练样本进行一次中心向量的修正,从而提高辨识精度[6]。其具体步骤如下:
1)给定输入输出数据x,y。
2)确定输入样本点的隶属度μi:

3)计算距离di:

4)计算聚类半径ri:

5)修正中心向量zi:

6)修正隶属度μi:
因此,改进后算法辨识步骤如下:
①参数初始化:确定λ和c,在线辨识得到zi。
②计算μi、di和ri。
③进行如下判断:
若di<ri,转至式(7);
若di≥ri,转至式(4)。
④ 在线修正中心向量zi和隶属度μi。
⑤ 若k=N,转至式(6),否则转至式(4)。
⑥ 若J满足辨识精度,辨识结束;否则增加c,转至式(3),重新辨识,直到J满足辨识精度,辨识结束。
通过改进的模糊聚类辨识,T-S模糊模型的输出可以表示为:
采用改进模糊聚类算法的T-S模糊辨识方法辨识过热汽温系统输出参数,如图1所示。
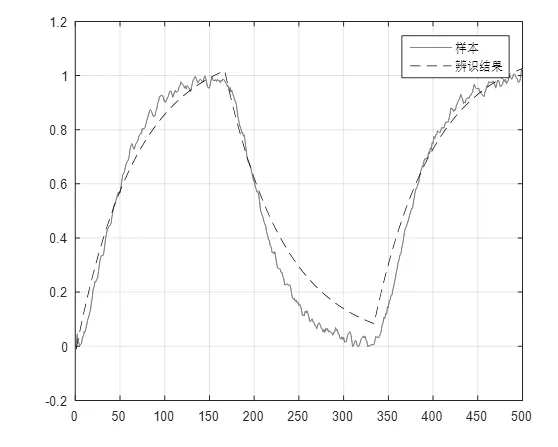
图1 辨识过热汽温系统输出参数Fig.1 Identification of output parameters of superheated steam temperature system
1.3 广义预测控制算法
1.3.1 预测模型
假设被控对象CARIMA模型为:
其中,y(k),u(k),ζ(k)分别是系统的输出、输入和干扰信号,Δ为差分算子。
1.3.2 滚动优化
1)目标函数

为使y(k)尽可能平稳地到达设定值w,选用如下参考:

2)输出预测
为了预测j步以后的输出,引入Dioaphantine方程:


由式(13)、式(17)和式(18)可得:

由于ω(k+j)都是k时刻以后的白噪声,则k+j时刻的最优预测是:

写成向量形式即为:
3)最优控制律
把式(20)代人式(21),并令∂J/∂u=0,得到:

取向量u的第一个分量即为Δu(k),则控制器的输出为:

广义预测控制律表示为式(22)和式(23)。
1.3.3 反馈校正
广义预测控制的反馈矫正体现在:在滚动优化的过程中,实时地把系统实际输出与预测值相比较,依据两者的差值来在线修正模型参数,从而实现反馈校正。
2 系统建模及应用
先利用本文第1章第2小节中所提的改进模糊聚类辨识算法对过热汽温系统的被控对象进行T-S模糊建模,再对辨识出的模糊模型线性化处理,处理之后的线性化模型成为适合于GPC的CARIMA模型,再将u加到过热汽温系统上[6],然后将系统的输出在线反馈给广义预测控制器,由此进行下一步的辨识和控制。建模完成之后给特定的阶跃扰动,观察系统输出。
过热汽温控制系统结构图如图2所示。

图2 过热汽温控制系统结构图Fig.2 Structure of superheated steam temperature control system
为了验证本文所提出的算法具有可行性,对其进行MATLAB仿真。以某电厂的过热汽温模型G(s)=1.24/(1+178s)e-100s作为被控对象进行仿真研究,并与常规PID(Kp=1.25,Ki=0.5)串级控制对比来评估本文所用方法的性能,得到的仿真图如图3所示。
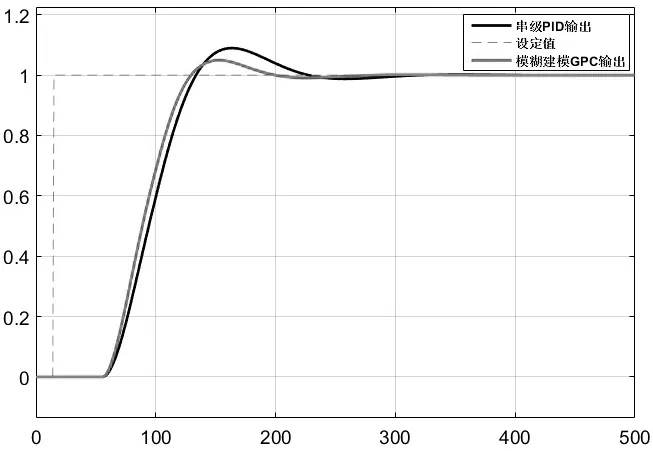
图3 对比两种控制方法示意图Fig.3 Comparison of two control methods
由图3可知,过热汽温控制系统采用基于T-S模糊建模的广义预测控制算法,比常规PID串级控制具有更小的超调量和更快的调节速度,具有良好的动态特性。因此,本文所提出的方法具有一定的可行性,可以应用于工程实践中。
3 结束语
本文首先对模糊建模和GPC算法进行了研究;其次,将聚类模糊T-S模型算法进行了简化处理,每一次在线辨识都及时修正聚类半径和隶属度,这样大大加快了模型的辨识速度也提高了模型的辨识精度;然后,将模糊建模与广义预测控制相结合,应用于火电厂过热汽温控制系统中;最后,在MATLAB中仿真验证算法的可行性,仿真结果表明在火电机组过热汽温控制系统应用中,基于T-S模糊建模的广义预测控制比常见的PID串级控制有更好的控制性能。
猜你喜欢
数学物理学报(2022年3期)2022-05-25
电子制作(2019年16期)2019-09-27
中国中医急症(2019年10期)2019-05-21
汉字汉语研究(2018年1期)2018-05-26
制造技术与机床(2017年6期)2018-01-19
电气技术与经济(2016年2期)2016-08-24
电源技术(2015年9期)2015-06-05
电测与仪表(2014年14期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
自动化博览(2014年9期)2014-02-28