
自动化码头岸边集装箱起重机特殊作业工艺系统
2021-08-25 08:50曾健
港口装卸 2021年4期
曾 健
上海国际港务(集团)股份有限公司尚东集装箱码头分公司
1 引言
全自动化码头,因其安全可靠性、作业效率性、人力成本可控性等方面较传统码头有显著优势,成为目前港口业发展的必然趋势[1]。目前,自动化码头的计划安排、设备调度、普通箱装卸均已实现自动化作业,但岸边集装箱起重机(以下简称岸桥)轨内特种箱装卸船与舱盖板作业时,仍沿用传统的人工操作模式。在当前模式下的轨内特种作业,需要中断岸桥的自动化流程,由远程操作员手动操作,增加了远程操作员的操作难度,降低了岸桥的作业效率;轨内集卡上档排队仍采用常规的人工核对信息、指挥排队模式,造成码头前沿交通调度困难、人工信息核对量大等问题,降低了生产效率和对外服务质量;轨内任务作业顺序调整采用人工调整模式,生产组织难度大。因此,洋山深水港四期自动化码头需要符合自动化流程的特殊作业系统来实现轨内特种箱装卸与舱盖板作业的自动化与智能化。
2 特殊箱业务流程
2.1 自动化码头岸桥基本情况
岸桥是码头海侧船舶装卸作业的主要设备,该自动化码头岸桥采用双小车结构,主小车和门架小车通过中转平台进行交互协同作业[2]。岸桥中转平台是主小车与门架小车的衔接区域,普通集装箱锁扭拆装与箱号箱型识别工作在中转平台上完成。岸桥双轨间距30 m,其中包含2根集卡车道,特殊箱作业通过集卡运输,在集卡车道完成装卸。
2.2 自动化码头特殊箱作业现状分析
该自动化集装箱码头的船侧作业主要分为AGV(自动导引车)运输与集卡运输,作业车道之间通过围网进行安全隔离。特殊箱包含危险品箱、超限箱以及框架箱等,此类集装箱作业安全管控因素较高,AGV运输无法满足特殊箱的托运要求。因此,特殊作业工艺的装卸任务,是由集卡进行水平运输托运,在岸桥双轨之间由岸桥主小车进行吊装作业。
相对于装卸流程全自动化的普通箱作业任务,特殊箱装卸作业较为繁琐复杂,岸桥作业没有自动化指令,需要远程操作司机全程手动操作,降低码头作业安全性与可靠性。集卡任务分配随机,且没有时间窗口逻辑,任务过早分配导致集卡拖箱等待时间较长;集卡司机在码头前沿的交通路线,完全依靠人工指挥,并且没有有效的信息提示功能,当特殊箱任务较多时,码头岸边容易造成交通拥堵,降低岸桥作业效率。特殊箱船侧作业流程见图1。
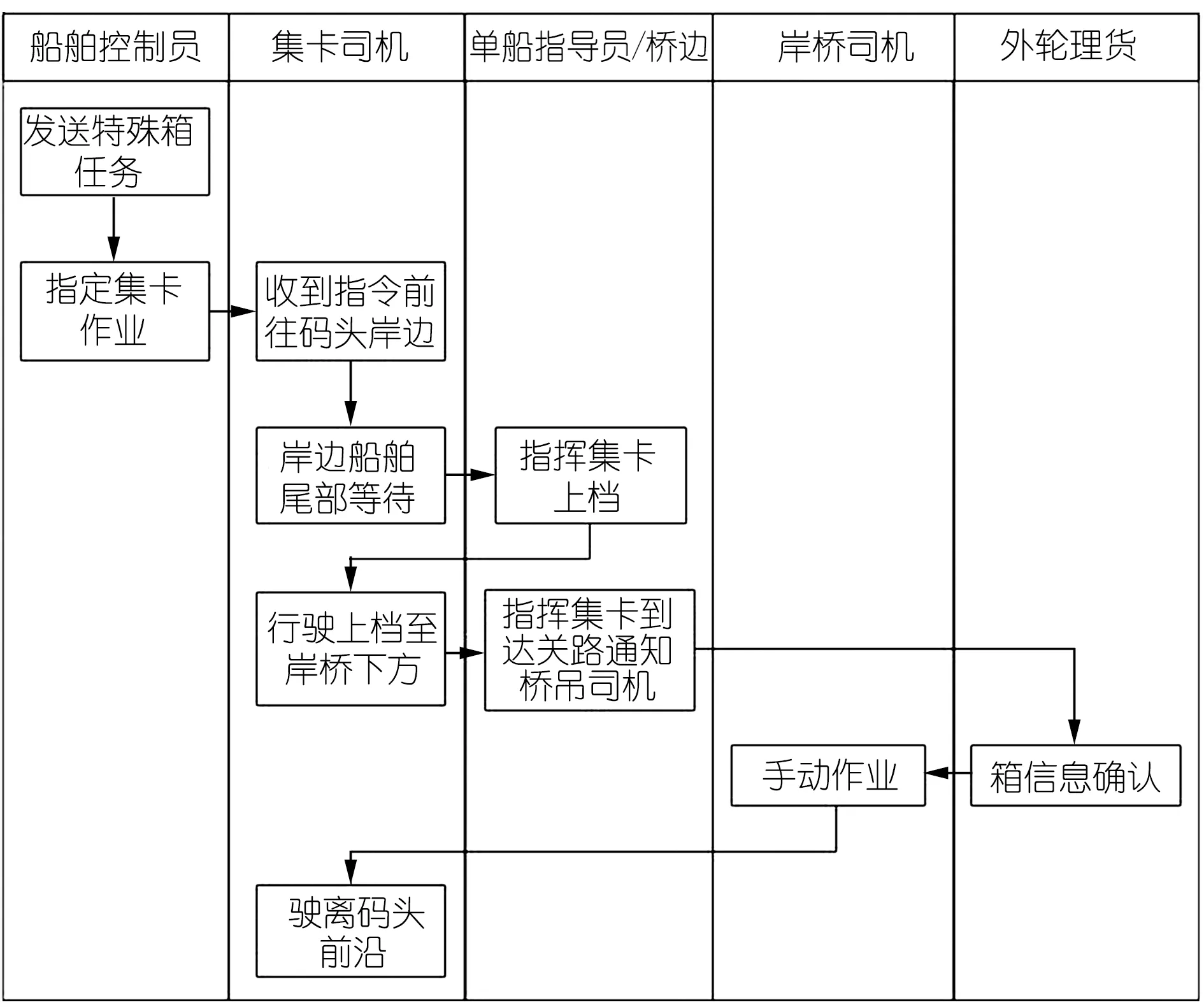
图1 特殊箱船侧作业流程图
3 自动化码头岸桥特殊作业系统应用
3.1 任务调度自动化技术
3.1.1 岸桥特殊任务调度逻辑
岸桥特殊作业任务调度,考虑当前作业任务关序、岸桥当前作业状态,并且结合码头场内集卡实时动态,智能决策调度自动化作业指令。在系统中增加集卡状态设置,TOS(Teminal Operation System,码头管理系统)根据当前集卡实时状态信息以及任务队列信息,自动调度岸桥轨内特殊作业任务指令。TOS将岸桥作业状态分为自动和手动2个状态,根据轨内任务不同箱类型,制定特定的业务规则。对于普通危险品箱,采用自动模式条件进行调度,而针对超限箱以及大件作业,则采用手动模式进行调度。将集卡状态分为为在途、岸边、车道3个阶段,系统针对这3个集卡阶段,采取不同的任务策略。当集卡处于车道状态且任务队列第一关为特殊作业工艺时,满足调度特殊作业指令条件,TOS自动生成岸桥特殊作业指令,ECS(Equipment Control System,设备控制系统)根据指令类型,将相应的操作指令传达至单机程序,岸桥远程操作员根据指令信息完成特殊作业。此外,当岸桥当前正在调度执行特殊作业工艺任务时,会暂停该岸桥下的AGV调度配比数,合理分配场内水平运输机械资源,达到码头运转效率最大化。
3.1.2 系统自动调整作业关序逻辑设计
在自动化码头作业过程中,岸桥作业路的任务队列排序,会由于各种机械运作情况的变化而产生作业次序的调整,若通过船舶控制员人工调整关序,则存在调整不及时以及操作不便捷等方面的问题。因此,需要系统自动判断任务队列作业关序的调整逻辑,在条件允许且合理作业的情况下,由系统智能决策进行作业任务次序的交换,减少人工操作的工作量(见图2)。

图2 特殊箱作业关序调整逻辑图
3.2 设备运行自动化技术
3.2.1 岸桥特殊任务系统架构与信息交互设计
自动化码头岸桥特殊作业系统,通过共享数据库的方式进行信息交互,建立数据共享数据库(DB),数据库能同时接收、处理、储存TOS和ECS发送的作业任务节点事件及当前作业状态,TOS与ECS通过数据库为载体,以事件交互形式进行信息传递,可避免网络拥堵、减少垃圾数据产生,最大限度实现全数据共享[3]。其中,TOS负责任务的调度,ECS负责执行TOS发送的作业任务,并将单机设备执行的结果反馈给TOS,从而使TOS进行下一步的流程动作。整个动作指令之间的事件交互响应及处理速度,都在1 s内完成数据库运算,并传递运算结果至系统,做到了精准、高效运行。
3.2.2 岸桥特殊作业执行流程
岸桥单机设备在收到自动指令后,进入作业阶段,根据动作指令分布解析,空吊具自动化运行至指定作业位置上方安全高度,其中,安全高度可进行参数调控,下降至安全高度后,进入人工干预半自动模式,对集装箱进行抓箱作业,吊具闭锁起升拉至安全高度,由系统自动运行至目的位置上方安全高度后,再次采取人工干预半自动模式进行集装箱放箱作业,吊具开锁起升后完成指令整套动作流程。为确保特殊作业工艺流程的安全性,吊具自动运行过程可进行参数调控,控制吊具运行速度,通过自动防摇防扭以及自动定位等辅助功能,精准运行至目标位置上方。此外,在进行超限箱作业时,也可将吊具重载阶段设置成人工操作模式,保障作业的可靠性。
3.3 集卡协调作业逻辑及功能设计
自动化码头特殊作业工艺的装卸任务,需要由集卡来进行集装箱托运工作,良好的集卡协调作业能力,是提高岸桥特殊作业工艺任务的关键[4]。
3.3.1 场内集卡调度逻辑
自动化码头场内集卡的任务,由TOS来进行智能决策、合理分配。
(1)集卡分类调度
由于码头作业类型多种多样,集卡的分配需要满足不同业务类型作业,且保证作业有效性与及时性,因此,将集卡进行分类。目前,采取2种方式对场内集卡进行分组分类。
集卡作业组与设备组分类。在系统中设定集卡作业组概念,可将多辆集卡绑定至同一集卡作业组,并对作业组进行编号,同时将作业组绑定至具体岸桥号。其中可以将作业组绑定单岸桥或多个岸桥构成的设备组,实现集卡与岸桥之间的多对多指定作业,极大程度减少船舶控制员之间以及船舶控制员与集卡司机之间的沟通交流,使得集卡分配由系统分组实现智能分配原则,提高船舶作业特殊工艺装卸的作业效率。
集卡任务作业类型分类。根据任务作业类型,主要分为装卸、转堆等作业类型,将集卡设置成对应作业类型,则集卡仅可分配设定的作业类型任务。此项分类的应用,可有效提高各作业类型间的集卡分配及时性,高效结合码头前后场集卡作业,提升码头整体作业能力。
(2)集卡托运挂板调度条件
码头特殊工艺作业任务,对集卡托运挂板具有不同的要求,当集装箱属于超限箱且超限数值超过一定值时,需要通过特殊挂板进行托运。针对不同的集装箱采取不同的托运条件,系统读取船图中集装箱的超限数据,在任务发送阶段,解析出不同托运条件下的任务,将任务分配至带有特殊挂板的集卡进行作业。
(3)集卡调度时间窗
自动化码头特殊作业任务的生成时间点,是根据具体的业务生产情况及船舶积载位置而定的。TOS根据作业任务队列的任务类型、作业关序、起始与目的位置等,智能计算出任务所需时长,统筹决策特殊作业工艺任务的要求时间,从而控制内集卡任务分配的时机,节省集卡无任务闲置等待时间。
3.3.2 场外集卡导航APP功能
自动化码头特种危险货物直装直提业务,需要外集卡直接拖运集装箱进码头前沿,岸桥对其进行特殊装卸工艺作业。洋山深水港四期自动化码头的外集卡直装直提业务,采用特定开发的外集卡作业APP功能,对集卡司机进行任务指令提示、作业路线导航以及码头当前作业情况概览显示等。外集卡司机在进场后,通过明确的提示信息,快速高效地驶往目的岸桥位置,有效提升外集卡作业效率及码头对外服务质量。
3.3.3 手持终端机PDA功能
自动化码头特殊作业工艺业务,需要现场工作人员进行交通指挥、集卡状态设置,因此现场工作人员配备的手持终端机需满足相应配套功能:
(1)任务队列展示。在码头船舶控制员发送的指令信息中,解析出任务的队列信息,提取有效信息,包含岸桥号、关号、箱号、ISO信息、场箱位信息、船箱位信息、托运集卡号等,将信息进行排版整合,显示在手持终端机中,使现场工作人员能够清晰明了地掌握当前岸桥特殊工艺作业情况。
(2)集卡上档作业提示信息。集卡司机在码头岸线排队时,系统提供清晰的作业信息至集卡司机手持终端机,提示司机当前任务队列具体排序,并显示跟车提示,告知集卡司机排队车队的前车车号。当岸桥特殊工艺作业下一关即将作业该辆集卡时,推送上档作业提示信息,并同时发送语音提示信息。
(3)集卡状态功能设置。集卡在托运集装箱过程中,需要在不同的业务流程节点进行集卡实时状态的设置。在手持终端机上加入集卡状态设置功能,可由人工控制集卡状态,从而降低业务过程中频繁通过对讲机进行人工交流的工作量。
3.4 作业信息实时展示功能
在自动化码头控制操作界面中,完整展示特殊箱作业信息。将集卡的作业关号、空重车状态、集卡作业阶段等显示于设备监控界面,提示当前任务所处阶段,以便船舶控制员及时根据当前业务情况作出相应的调整;将集卡当前所分配的任务信息,包括作业路、关号、箱号、任务要求位置信息、集卡当前所处阶段等显示于内集卡控制界面,同时,增加集卡池与设备池操作窗口,便于对集卡作业分类,将信息简洁明了地整合起来,使得船舶控制员的操作与监控更加便捷。
在自动化码头岸桥远程操作台界面,将各类特殊作业工艺任务类型予以区分。不同于普通装卸任务,对于特定不同类型任务,比如普通危险品、超限箱、舱盖板等,均有特定的岸桥作业模式。岸桥视频监控界面设计摄像头自动对焦程序,岸桥在进行特殊作业时,根据任务类型,自动对焦至任务目标,确保岸桥远程操作人员能够快速、精准地进行锁头对位,在吊具闭锁起升后,视频监控自动切换至全景模式,确保作业的安全可靠性。完成特殊作业后,视频监控界面自动切换至正常装卸镜头作业模式,并支持手动微调视角与对焦等参数功能。
4 结语
自动化集装箱码头岸桥特殊作业工艺系统的应用,节省了岸桥特殊工艺作业时间,减少了船舶作业整体时间,为自动化码头拓展业务能级水平,提高年吞吐量打下了坚实基础;同时,集卡平均等待时间显著降低,周转时间减少,降低了集卡能耗水平。自动化码头特殊作业工艺业务流程中,简化了各业务岗位之间的操作步骤,降低了操作强度,减少了繁琐的沟通及确认工作,极大程度地降低了由于人员沟通信息不明确等产生的外部不利因素,提高了码头特殊作业工艺的安全性与可靠性。
猜你喜欢
环球时报(2022-07-29)2022-07-29
销售与市场(营销版)(2021年8期)2021-08-30
集装箱化(2020年7期)2020-06-20
中国航海(2019年2期)2019-07-24
天津科技(2018年12期)2019-01-02
中国储运(2017年8期)2017-08-08
小星星·阅读100分(高年级)(2017年2期)2017-02-24
集装箱化(2016年8期)2016-10-20
作文与考试·小学高年级版(2016年7期)2016-05-14
儿童时代(2009年11期)2009-11-27
