
基于健壮稳定性的高速列车悬挂参数优化匹配方法
2021-09-09 05:17梁树林张开林
铁道学报 2021年8期
姚 远,李 广,梁树林,张开林
(西南交通大学 牵引动力国家重点实验室, 四川 成都 610031)
横向稳定性是高速列车动力学性能设计中最受关注的问题之一,虽然轨道车辆的横向稳定性可以通过先进的方法如主动悬架系统得到增强[1-5],但对传统被动悬挂参数进行优化,仍然是提高车辆横向稳定性的有效方法。一些针对提高轨道车辆蛇行稳定性的研究已经被实施[6-8]。基于车辆横向稳定性的转向架悬挂参数优化,还要考虑悬挂参数对车辆平稳性、曲线通过性能等的影响,但是后者往往受二系悬挂水平刚度影响较大,而影响车辆稳定性的参数更多。本文对影响车辆横向动力学性能的悬挂参数进行解耦,着重对除二系横向和纵向刚度以外的转向架水平方向的悬挂参数进行优化。合理的转向架悬挂参数匹配有利于提高列车横向稳定性裕度,增强车辆系统抵抗转向架悬挂参数和轮轨接触等参数摄动对横向稳定性影响的能力,即列车具有较强的悬挂参数和线路适应能力。针对该多目标优化问题,对影响转向架横向稳定性的关键参数进行多参数优化。
一般来说,机械系统的设计优化是一种多学科问题,其任务是在复杂和矛盾的设计标准中寻求有效折中的解决方案[9-10]。在轨道车辆悬挂参数设计中,它的任务是寻找一种折中的悬挂参数设计,使其同时兼顾横向稳定性、曲线通过能力和乘坐舒适性等性能指标。遗传算法被认为是全局优化中最有效的方法之一,尤其适用于复杂非线性系统的设计优化问题。文献[10]通过遗传算法提出一种可以有效处理铁路车辆设计的冲突要求的方法,利用遗传算法解决了具有21个自由度的轨道车辆模型曲线通过性能问题的优化。文献[11]采用遗传算法优化转向架悬架的被动阻尼元件,其优化结果可以改善轨道车辆的安全性和舒适性。文献[12]通过遗传算法解决了转向架悬架的磨损和舒适性的Pareto优化问题,建立了50个自由度的轨道车辆模型,并以减少轮轨接触磨损和提高乘客乘坐舒适性为目标,其优化得到的转向架悬架保证了铁路车辆磨损的减少和舒适性。悬架系统设计参数的不确定性会对轨道车辆的动力学行为产生负面影响[13]。目前,针对铁路车辆悬挂参数优化研究的大部分文献聚焦于车辆直线性能、曲线性能以及车辆磨耗性能的折中。
转向架悬挂参数优化匹配对于列车横向运行健壮稳定性设计尤其重要。由于稳定性设计中需要兼顾车辆横向稳定性裕度,以及转向架悬挂参数健壮性和线路适应能力,因此转向架悬挂参数横向稳定性设计也是一个多目标优化过程。本文提出两种基于机车车辆横向稳定性的转向架关键悬挂参数优化匹配设计方法。定义列车稳定性性能设计目标,分别采用多目标优化方法和参数筛选法,对影响列车稳定性的多个关键悬挂参数同时优化,挖掘影响列车横向稳定性的转向架悬挂参数的匹配规律,为列车悬挂参数优化设计提供方法。
1 车辆模型与健壮稳定性指标
1.1 车辆动力学模型
为研究车辆的横向稳定性,建立简化的车辆横向运动动力学模型,如图1所示。该模型包括1个车体、2个构架、4个轮对,共7个刚体。车体和构架具有横向、摇头和侧滚自由度;轮对具有横向和摇头自由度。轮对与构架之间为一系悬挂,由横向、纵向和垂向定位刚度组成,模型考虑一系转臂定位结构。车体与构架之间设有横向、纵向和垂向二系悬挂刚度和阻尼,以及抗侧滚刚度。为了分析减振器串联关节刚度以及油液减振器自身刚度对车辆稳定性的影响,减振器采用弹簧和阻尼串联而成的Maxwell模型建模[14]。该动力学模型共有25个自由度。本文针对线性模型进行线性稳定性分析,轮轨接触几何采用等效锥度来表示,轮轨切向力采用线性Kalker理论计算。参考国内现服役的某型高速动车[15],车辆系统动力学模型为

图1 车辆横向动力学简化模型

( 1 )
式中:x为系统的自由度矢量;M、C、K、Q分别为系统的质量、阻尼、刚度、外力单元矩阵。由于刚度矩阵K的不对称特性,通过传统的模态分析方法不能将式(1)转换成非耦合的微分方程组,但是通过使用复模态变换可以实现。为此,将式( 1 )整理成状态空间形式,并计算系统矩阵的特征向量和特征值,得到车辆系统模态振型和线性稳定性[16-18]。
转向架悬挂参数设计时,需要兼顾车辆直线运行性能和曲线通过性能。根据已有的经验,转向架二系悬挂水平刚度对车辆平稳性和曲线通过性能影响较大,而对横向稳定性影响不显著,而且已有高速列车二系悬挂空气弹簧刚度变化范围不大,本文着重对车辆稳定性进行研究,因此二系横向刚度不参与优化。主要以影响车辆横向稳定性的转向架关键悬挂参数,如一系纵向刚度kpx,一系横向刚度kpy,抗蛇行减振器阻尼csx,二系横向减振器阻尼csy,抗蛇行减振器串联刚度kncsx和二系横向减振器串联刚度kncsy作为优化对象,以提高车辆健壮蛇行稳定性。
1.2 健壮稳定性指标
转向架悬挂元件在设计制造中不可避免出现误差,在服役过程中,车辆悬挂元件如橡胶关节、液压减振器等会随着时间推移而发生蠕变或故障,而悬挂刚度或阻尼参数发生改变会直接影响车辆动力学性能。另一方面,随着线路变形以及踏面和轨头磨耗等因素,轮轨接触几何关系会发生改变,同样也会影响车辆动力学性能。轮轨低锥度车辆稳定性裕度不足时,发生一次蛇行,车体出现低频的横向晃动;高锥度车辆稳定性裕度不足时,发生二次蛇行,转向架横向振动幅值加剧。所以高速列车不仅需要在较宽的速度范围内保持良好的横向稳定性,同样也需要较强的抵抗转向架悬挂参数和轮轨接触等参数摄动对横向稳定性影响的能力,即列车横向稳定性应具有一定的悬挂参数和线路适应能力。本文提出车辆悬挂参数健壮性和等效锥度健壮性,统称为健壮稳定性,转向架悬挂参数优化匹配需要兼顾多方面性能。针对以上车辆动力学模型,计算系统矩阵的特征根,并求解蛇行模态对应特征根的实部与特征根的模之比,即蛇行模态自然阻尼,定义为系统线性稳定性指标ζ,通常阻尼值为正时表明该线性系统稳定,本文选取较小值作为优化方向,故定义ζ为负值时系统为稳定状态。
某些车辆在低速时易发生低频晃车,通常出现在轮轨接触等效锥度较小时,如新轮和轨道刚打磨完的情况,而车辆在高速易发生高频蛇行失稳。因此将速度200 km/h时轮轨接触低锥度工况和350 km/h时正常锥度工况的稳定性作为优化目标确保车辆横向稳定性,分别定义为低锥度稳定性指标ζlow和正常锥度稳定性ζnorm,该值越小代表车辆在该工况下的蛇行运动阻尼较大,其稳定性越好。为了评价转向架悬挂参数和轮轨接触等参数摄动对横向稳定性影响,将悬挂参数按某种分布规律在某个区间内分布,组合不同悬挂参数计算系统稳定性指标,并将其标准差值定义为悬挂参数健壮性指标std(ζpar) ;同样,将等效锥度λ在一定范围内分布对应系统稳定性指标的标准差值定义为等效锥度健壮性指标std(ζλ)。std(ζpar) 和std(ζλ)的值越小,表明车辆蛇行运动稳定性受悬挂参数和等效锥度扰动的影响越小,对应的健壮性越强。本文采用1000组均匀分布在±20%范围内的悬挂参数随机组合,计算分析得到悬挂参数健壮性指标;等效锥度在0.05~0.30范围内均匀分布,分析得到等效锥度健壮性指标。优化目标的工况设置及参数范围见表1。

表1 优化目标的工况设置和阈值范围
2 多目标优化方法及其结果
2.1 多目标优化方法
多目标优化问题与单目标优化问题存在较大差异,单目标优化问题中,可以寻找到最好的解,该解优于其他所有解,通常是全局最大或最小,即全局最优解。而当存在多个目标时,由于目标之间存在冲突无法比较,所以很难找到一个解使得所有的目标函数同时最优,即一个解对于某个目标函数可能是最好的,但对于其他的目标函数却不是最好的,甚至有可能是最差的。因此,对于多目标优化问题,通常存在一个解集,这些解之间就全体目标函数而言是无法比较优劣的。这种解称作非支配解或Pareto最优解。可根据经验和目标函数的重要性人为地从中选出符合使用条件的优化解。
本文针对一系纵向刚度kpx,一系横向刚度kpy,抗蛇行减振器阻尼csx,二系横向减振器阻尼csy,抗蛇行减振器串联刚度kncsx和二系横向减振器串联刚度kncsy6个关键悬挂参数进行优化,以车辆系统的ζlow、ζnorm以及std(ζpar) 和std(ζλ)4个指标为优化目标,该多目标优化设计问题描述如下
min{ζlow,ζnorm,std(ζpar),std(ζλ)}
( 2 )
由于NSGA-II算法可保持种群多样性,提高了计算效率,是解决多目标问题的有效算法。因此选用带精英策略的快速非支配排序遗传算法NSGA-II进行多目标优化设计[19]。
2.2 多目标优化结果
图2为得到的Pareto优化目标前沿,图2水平坐标轴分别为车辆的低锥度稳定性指标ζlow和正常锥度稳定性指标ζnorm,垂向坐标轴为等效锥度健壮性指标std(ζλ),该值越小等效锥度健壮性越好,即轮轨接触几何状态对车辆稳定性影响越小,同时也表明该车辆系统具有较强的线路适应能力和较长的踏面镟修周期。图2中点的颜色深浅代表悬挂参数健壮性指标std(ζpar)的大小,颜色越深说明其悬挂参数健壮性越好,即悬挂参数在一定范围内变化对车辆横向稳定性影响较小。从图2可以看出ζlow、ζnorm和std(ζλ) 3个指标之间呈现一种“蝴蝶状”分布,说明了优化目标之间的矛盾性,当系统稳定性提高时,牺牲了悬挂参数和等效锥度健壮性。Pareto前沿为优化后的目标值,每个点都具有其他点不具有的优势,可以从中挖掘规律选取满足设计要求的目标值,从而选取对应的悬挂参数。

图2 多目标的Pareto前沿
Pareto前沿的点数众多,对数据的分析困难,通过K-Means聚类方法[20]对图2中数据进行处理。首先将Pareto前沿数据进行归一化,根据空间距离进行聚类处理,使得聚类中心点在Pareto前沿中的分布较为均匀。图3为对Pareto前沿进行聚类处理的结果,共获得了20个聚类中心点。

图3 Pareto前沿的聚类分析
在20个聚类中心点中提取6类具有代表性的Pareto解进行分析,包括第12、17、7、19、4、8类。其中,第12、17、7、19类分别对应ζlow、ζnorm、std(ζλ) 和std(ζpar)的目标性能最优,但其对应的其他目标性能较差;第4类对应的ζlow和ζnorm指标均较优,但其对应的std(ζλ) 和std(ζpar)目标性能较差;第8类则是兼顾了该4个目标性能的典型悬挂参数集,其对应的车辆系统性能最为全面。图4为该六类Pareto解对应车辆系统的4个目标值的雷达图,图4中坐标轴越往外表示该目标数值越小,即该目标性能越越优。

图4 六类Pareto解对应优化目标值分布雷达图
2.3 悬挂参数优化匹配
图5为该六类Pareto解对应的悬挂参数分布情况尾箱图,且每一类Pareto解对应车辆系统的性能目标值均不相同,因此可以挖掘出不同系统性能对应的悬挂参数匹配规律。图5横轴为六类Pareto解,各分图的纵轴分别对应6个关键悬挂参数。由图5可知,kncsy对应子图中六类Pareto解的取值相差不大,所以kncsy对系统性能的影响不明显。第12类选用较小的kpx、较大的csx和kncsx,其各项性能指标均较好,但正常锥度系统稳定性较大,轮轨接触点横向位移较小,易导致踏面凹形磨耗;第7类选用较小的csy,其悬挂参数稳健性较好;第19类Pareto解选取较小的csx,匹配较宽范围内的kpx和kncsx值,具有较好的等效锥度健壮性和悬挂参数健壮性,但稳定性较差;第4类Pareto解选用较小的kpx和较大的csx进行匹配,其系统的低锥度稳定性和正常锥度稳定性均较好,但等效锥度健壮性较差;第8类兼顾了该4个目标性能,采用较小的csx和kncsx。由此可根据csx的取值总结出两类匹配规律:第一类为较大的csx,并匹配采用较小的kpx,如第12、17、7、4类;第二类采用较小的csx,如第19和8类。对比该两类匹配规律对应车辆系统的性能可知:第一类车辆稳定性较好,但等效锥度健壮性较差;第二类对应车辆系统的性能特点则与之相反。这两类悬挂参数匹配分别类似于我国目前主要运营的两种高速列车的悬挂参数选型。
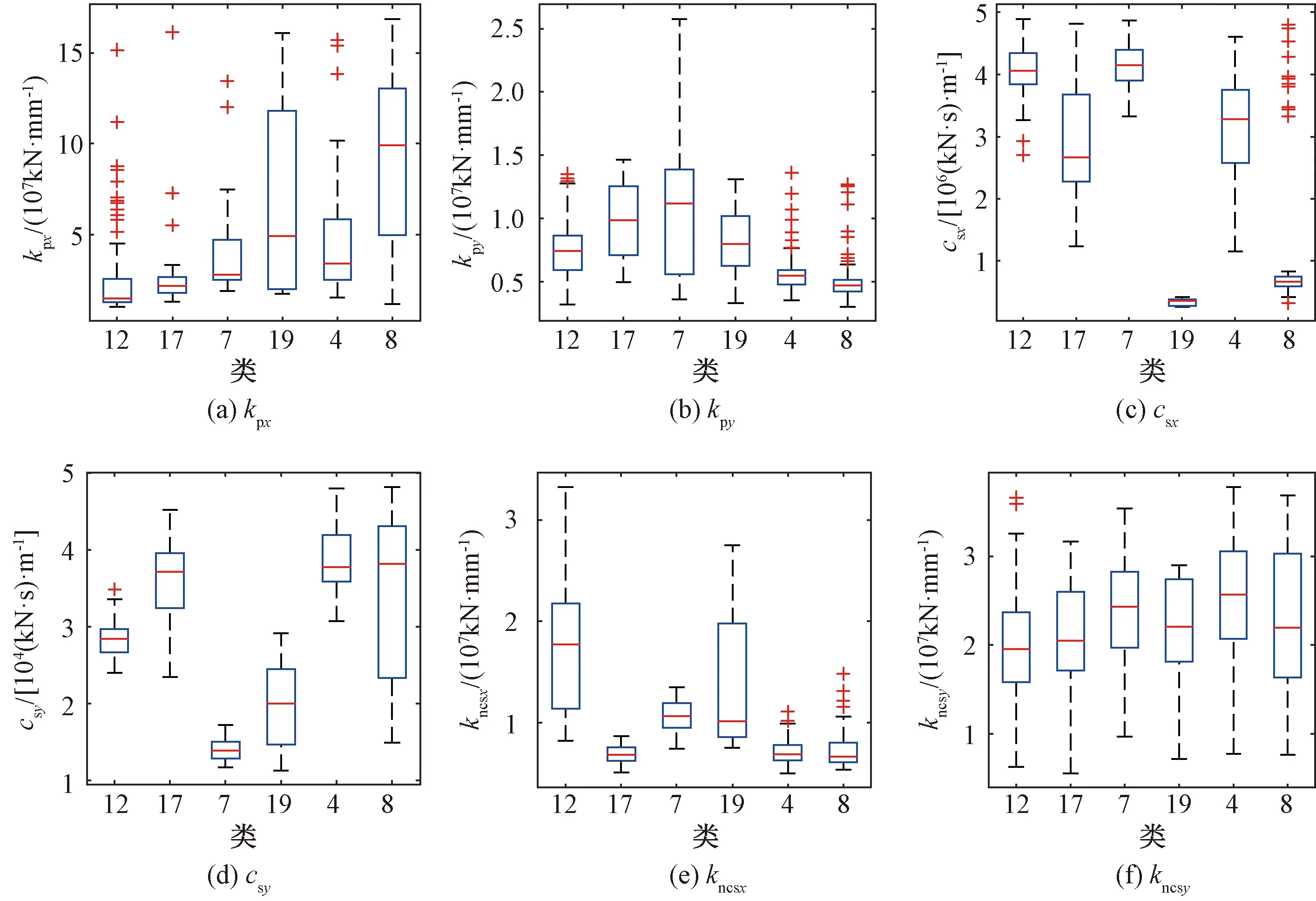
图5 六类Pareto解对应悬挂参数分布尾箱图
3 参数筛选方法及其结果
3.1 参数筛选法流程
以上述车辆线性模型为研究对象,同样将速度200 km/h低锥度工况下的稳定性指标ζlow、350 km/h正常锥度工况下的稳定性指标ζnorm、悬挂参数健壮性指标std(ζpar)和等效锥度健壮性指标std(ζλ)作为优化目标,其各优化目标的工况设置和阈值范围见表1,针对上述6个关键悬挂参数进行优化。该6个关键悬挂参数的优化范围与多目标优化方法一致,参数筛选法的具体流程如图6所示。

图6 参数筛选法优化流程
通过Matlab对6个关键悬挂参数生成均匀分布的50 000组随机参数矩阵,将每组随机参数集逐组赋给车辆动力学模型,对该模型依次进行ζlow、ζnorm、std(ζpar)和std(ζλ)计算。其中每个指标计算结束时均会对其结果进行判断,当该仿真结果不满足要求时,不再对该组参数集的车辆进行下一个指标计算,直接调用下一组参数集重新开始计算;当某组参数集的车辆系统性能指标满足全部4个优化目标阈值要求时,保存该组随机参数,并调用下一组参数集继续进行计算,最终从大量的随机参数中得到满足全部4个优化目标阈值要求的悬挂参数组合。
3.2 离散统计方法
根据图6参数筛选法的流程,对表1中的4个优化目标及其阈值进行多目标逐层筛选,最终得到满足设定条件的转向架悬挂参数集par。参数筛选结果通过归一化处理后如图7(a)所示,实现了将6个关键悬挂参数在一个图中表示。图中同一条颜色的折线段表示一组悬挂参数集,横坐标p1、p2、p3、p4、p5、p6分别表示该6个关键悬挂参数kpx、kpy、csx、csy、kncsx、kncsy;纵坐标表示参数归一化数据,1表示计算范围内的最大值,0表示最小值。由此可知该6个关键悬挂参数之间具有明显的匹配规律,即某一个或几个参数选择较大值时,另外一个或几个参数要选择较小或适中的参数与之匹配。

图7 参数筛选法的结果及离散化统计结果
为了挖掘悬挂参数匹配规律,采用离散统计方法统计有效数组出现的次数。每个关键悬挂参数的范围离散成均匀5段,从小到大分别用数字1、2、3、4、5来表示,见表2。图7(b)是针对悬挂参数进行离散处理后的结果,每一条折线上的6个关键悬挂参数具体值对应一组有效的悬挂参数集;图中同一折线出现次数越多,表示该组匹配规律越明显。为了更直观地观察悬挂参数之间的匹配关系,对有效悬挂参数匹配的发生次数进行统计,结果见图8和图9。图8为kpx、csx和kncsx的匹配关系,图9为kpx、kpy和csy之间的匹配关系。图中水平坐标轴分别为两个参数的离散区间,垂直坐标轴表示有效匹配的统计次数,每个分图的等式代表着该悬挂参数在该指定范围内的取值。由图8可知,kncsx取较小值时,kpx和csx均可以在一个较大的范围任意取值,具有较强的适应性;但随着kncsx增加,需要减小沿转向架纵向的悬挂参数kpx和csx。从图9可知,csy越大,出现的统计次数越多;当csy取较小值时,kpx和kpy的取值呈现负相关的规律,即较大的kpx需要匹配较小的kpy,较小的kpx需要较大的kpy来匹配。

表2 悬架参数的优化间隔和离散性

图8 kpx,csx、kncsx的匹配规律

图9 kpx,kpy、csy的匹配规律
3.3 单目标参数筛选结果
针对多目标进行参数筛选可以快速得到同时满足多个目标要求的悬挂参数匹配组合,但其优化目标设定范围较大,以得到较多的悬挂参数集,这是因为某些目标值经常是相互矛盾的,例如ζlow和std(ζλ),若ζlow设定范围过小,得到的悬挂参数集对应的std(ζλ)的值往往很大,而较小std(ζλ)的范围内没有有效悬挂参数集出现。为了具体分析针对某个性能指标对应的悬挂参数匹配原则,在图7参数筛选结果的基础上,进一步缩小对应性能指标的阈值范围,减少有效的悬挂参数集,使符合某一目标的参数匹配规律更清晰。表3为单目标参数筛选的工况设置和指标阈值,其优化对象仍是6个关键悬挂参数。

表3 单目参数筛选的工况设置和指标阈值
对3个单目标工况分别采用参数筛选法进行选择,并从每个工况的筛选结果中提取2组典型悬挂参数集进行稳定性分析,共得到6组典型悬挂参数集。计算其对应车辆速度和等效锥度变化的根轨迹曲线以及对应的线性稳定性指标,得出对应车辆系统稳定性的变化规律。表4为该六组典型参数集的具体值以及对应的健壮稳定性指标,分别用s1~s6表示。其中s1和s4组悬挂参数需要较小的kncsx来满足车辆性能指标,但由于疲劳强度等设计问题,刚度过小的橡胶关节在实际工程结构中不能实现,所以本文认为该两组参数仅在理论上可行,因此这里不对其进行深入讨论;s2和s3采用较大csx与较小kpx匹配,悬挂参数匹配类型定义为Type1,具有较好的正常锥度稳定性。但s2相对于s3采用了较大的csy,其低锥度蛇行稳定性指标较好,而等效锥度健壮性较差。s5和s6采用较小csx,参数匹配类型定义为Type2,具有较好的等效锥度健壮性。但s6相对于s5采用了较小的kpx,并匹配以较大的csy和kncsx,其对应车辆系统的低锥度稳定性指标和正常锥度稳定性指标较好。两种悬挂参数匹配设计的思路略有不同,Type1采用较大的运行稳定性来弥补等效锥度健壮性的不足,而Type2采用较好的等效锥度健壮性来弥补车辆蛇行稳定性,该两种参数匹配方式在实际工程中都有应用。这与上述提出的两类悬挂参数匹配规律一致。

表4 六组典型悬挂参数集的具体值及其健壮稳定性指标
3.4 稳定性分析


图10 随运行速度变化的车辆系统根轨迹曲线.
将车辆系统的速度根轨迹进行比较可以发现,六组悬挂参数集对应车辆系统的速度根轨迹曲线符合悬挂参数的分类。s2和s3组采用较小的kpx与较大的csx匹配,属于Type1,其对应的速度根轨迹曲线显示:随着车辆速度的增加,频率低于2 Hz的转向架蛇行模态的稳定性增强,且在一个较宽的速度范围内车辆系统是稳定的,说明该两组参数集对应车辆系统的横向稳定性较好。s5和s6采用较小的csx,属于Type2,其对应的速度根轨迹曲线显示:频率范围为1~4 Hz的蛇行模态会影响车辆系统的线性稳定性,且其对应车辆系统蛇行模态的稳定性随着车速的增加而快速减小,其对应的横向稳定性较差。这都与关于Type1和Type2对应车辆系统的横向稳定性特点的结论是一致的。
六组悬挂参数对应车辆系统随着等效锥度变化的根轨迹如图11所示,其中车辆运行速度为350 km/h。每条根轨迹曲线由25个特征根组成,其等效锥度范围为0.02~0.5,每个“○”表示相应的模态,较大的符号表示较大的等效锥度。通常,随着等效锥度的增加,与蛇行模态相关阻尼先增大后减小。

图11 随等效锥度变化的车辆系统根轨迹曲线.
在图11中,当车辆运行时的等效锥度位于转向架蛇行根轨迹曲线的转折点时,车辆的等效锥度健壮性指标较小。较小的车辆等效锥度健壮性指标表明蛇行稳定性对轮轨接触等效锥度的变化不敏感。换句话说,车辆对轨道线路具有较强的适应性,有利于降低车辆运营和维护成本。其中轨底坡和轨头轮廓的变化以及踏面的长期修理,都会引起轨道线路变化。从图11还可以看出,s4、s5和s6组悬挂参数对应的车辆系统的稳定性受等效锥度变化的影响较小,其等效锥度健壮性较好,而s2和s3组悬挂参数对应的车辆系统的等效锥度健壮性则较差,这与关于Type1和Type2对应车辆系统的等效锥度健壮性特点的结论是一致的。事实上,由于低锥度导致的车辆蛇行失稳时有发生,特别是在新的踏面轮廓或较大的轨底坡的状况下。通过提高车辆的蛇行稳定性,可以明显改善车辆系统低锥度稳定性和等效锥度健壮性,如s2组悬挂参数。但过大的稳定裕度会减小轮轨接触点的横向位移,从而导致踏面局部凹形磨损,因此要合理的控制车辆系统的稳定性裕度。
为了更详细的分析表4中六组悬挂参数对应的车辆系统蛇行稳定性,计算车辆系统在同时改变等效锥度和运行速度的线性稳定性指标,结果如图12所示。图12中横轴是变化的等效锥度,纵轴是变化的运行速度,图12中每条曲线代表的是线性稳定性等高线。从图12可以看出,当沿纵轴的稳定指数变化范围较小时,说明运行速度的变化对蛇行稳定性影响较小,表明系统具有较强的横向稳定性;当蛇行稳定性指标沿横坐标轴变化较小时,说明车辆的等效锥度健壮性较好。从图12还可以看出,运行速度对低等效锥度车辆稳定性的影响小于高等效锥度的车辆;采用不同悬挂参数车辆的稳定性随着等效锥度和运行速度的变化有明显的不同。

图12 不同速度和等效锥度下稳定性指标等高线
车辆线性稳定性指标的等高线也服从悬挂参数分类特点。图12中s1、s2和s3对应分图的等高线趋势是一致的。其中s1和s2存在更大的稳定区域,而s3在较小等效锥度下的稳定性较差;另一方面,s3对应车辆系统在350 km/h的速度时,其线性稳定性随着等效锥度的增加而减小,因此该组悬挂参数匹配合适的等效锥度范围较小。所以对于Type1悬挂参数,它需要匹配较小的等效锥度以确保车辆蛇行稳定性。s4、s5和s6对应分图的等高线趋势大致相同,其在大锥度范围内系统稳定性受等效锥度变化的影响较小,且等效锥度较小时,系统的稳定性较差。因此,当车辆采用Type2悬挂参数时,需要较大的等效锥度踏面以确保车辆蛇行稳定性。但需要注意的是,无论采用何种类型的悬架参数,如果轮轨接触的等效锥度过小,则系统稳定性一定较差。
4 结论
(1) 提出健壮稳定性的概念,定义悬挂参数健壮性和等效锥度健壮性指标,并以此对影响车辆稳定性的转向架关键悬挂参数进行优化匹配研究。第一种方法采用基因算法的车辆悬挂参数多目标优化;第二种方法为参数筛选法,对满足要求的悬挂参数采用离散统计的方法,挖掘转向架悬挂参数匹配规律。结果表明:采用优化后的悬挂参数使车辆具有较好的系统健壮性指标,以提高高速列车在较宽速度范围内具有较强的悬挂参数和线性适应能力。
(2) 得到两类转向架悬挂参数匹配规律,第一类采用较小的一系纵向刚度和较大的抗蛇行减振器阻尼组合;第二类则采用较小的抗蛇行减振器阻尼,然而其二系横向减振器阻尼和一系纵向刚度要与抗蛇行减振器串联关节刚度需要呈现负相关组合。第一类悬挂参数需要较小的等效锥度的踏面来匹配,车辆具有较好的低锥度稳定性;而第二类悬挂参数需要较大的等效锥度踏面来匹配,车辆具有较好的锥度健壮性。两种组合都能实现较好的车辆系统悬挂参数健壮性。
猜你喜欢
建材发展导向(2022年20期)2022-11-03
安徽冶金科技职业学院学报(2022年2期)2022-08-09
轮胎工业(2022年7期)2022-07-20
昆明医科大学学报(2022年3期)2022-04-19
北京航空航天大学学报(2021年7期)2021-08-13
科学家(2021年24期)2021-04-25
科技研究·理论版(2021年20期)2021-04-20
科技研究·理论版(2021年20期)2021-04-20
汽车世界·车辆工程技术(中)(2020年1期)2020-07-09
中国新技术新产品(2020年5期)2020-05-06
