
基于有限元的靴轨系统动力学建模及参数影响规律研究
2021-09-09 05:17左小红靳守杰刘志刚
铁道学报 2021年8期
张 静,左小红,靳守杰,冯 超,刘志刚
(1.西南交通大学 机械工程学院, 四川 成都 610031; 2.西南交通大学 电气工程学院,四川 成都 611756;3.广州地铁集团有限公司,广东 广州 510335;4.广州地铁设计研究院股份有限公司,广东 广州 510010)
集电靴-接触轨供电系统(以下简称靴轨系统)以其使用寿命长、可靠性高、维修费用低等优点得到越来越广泛的应用[1]。随着城市轨道交通运行速度的不断提升,集电靴与接触轨的动力冲击及靴轨系统的振动均会增大,将直接影响靴轨系统的使用寿命和供电稳定性。为使靴轨系统在运行时接触力波动较小,取流更平稳,亟需考虑靴轨参数的合理匹配,开展靴轨动态性能研究。
集电靴属于移动部件,接触轨属于固定设施,集电靴与接触轨通过滑动接触进行取流,因此可将靴轨系统等效为移动载荷作用于梁上的振动系统。文献[2]采用ANSYS®软件,分析梁在移动力下的振动响应,利用小波多分辨率,识别出单个和多个裂纹的位置。文献[3]将移动质量的惯性作为附加的动态刚度矩阵,采用Wittrick-Williams方法,求解梁的响应特征。文献[4-5]采用有限元法(Finite Element Method,FEM),通过Newmark积分将控制方程转化为动力学方程,求解绳索、欧拉梁和铁木辛科梁的振动。文献[6]采用模态叠加法,完成移动质量-梁系统固有频率的求解。上述文献的研究均将移动载荷视为力或者质点,但靴轨系统中的集电靴实际上是包含质量、刚度和阻尼的机构,而且也需要对靴轨系统间的接触力完成求解。因此,可考虑靴轨系统的特殊结构,借鉴传统移动载荷作用下梁的有限元建模思路,建立适合靴轨系统的有限元模型,分析靴轨系统在不同运行条件下的接触特性。
对于靴轨系统,已有研究主要集中在对靴轨系统运行参数的测量方案设计和靴轨系统的建模两方面。在测量方案设计方面,文献[7]以武汉地铁集电靴为研究对象,设计了集电靴动态接触力的测量方案,并对集电靴进行力学分析,得出了应变片应变和静态接触力的关系式。文献[8-12]设计了靴轨接触力、滑靴位移和滑靴加速度等动力学参数的测量方案,基于试验数据对靴轨动态性能进行了简单的分析与评价。上述文献的测量方案可为靴轨系统的分析和评价提供数据支持,但仅通过测量数据,难以分析靴轨系统动态运行时的接触特性,因此,有必要结合有限元建模与现场实测数据分析靴轨系统的接触特性。在靴轨系统建模方面,文献[13-14]通过建立靴轨系统模型,对靴轨系统进行仿真研究,分析了不平顺和车辆振动对靴轨受流稳定性的影响。文献[15-16]对实际工程中的集电靴与接触轨进行动态参数识别,得到了集电靴与接触轨的有限元模型。文献[17-18]针对集电靴和接触轨端部弯头进行建模,分析列车提速情况下集电靴振动特性的影响因素。以上文献均将接触轨视为刚体,未考虑接触轨和绝缘支架的弹性形变对滑动接触特性的影响。
本文采用虚位移原理,推导集电靴质量块等效模型,根据应变能和动能相等,获得接触轨支撑结构的等效模型,考虑系统运动载荷的复杂边界条件,采用ANSYS®有限元软件,建立精确的靴轨系统耦合模型。通过对比仿真计算结果与广州地铁实测数据,验证了靴轨系统有限元模型的正确性和有效性。最后,研究不同列车运行速度、接触轨跨距、滑靴质量、支撑刚度、接触刚度对靴轨动态接触力的影响规律,为改善靴轨受流质量提供理论依据。
1 集电靴模型
以集电靴为研究对象,其主要包括滑靴、摆臂、弹簧、底座等组成部分。当集电靴工作时,滑靴贴合接触轨下表面的不锈钢滑行,随着集电靴沿线路方向运行,集电靴的摆臂转角将会发生微小的变化,造成靴轨接触力的变化。由于集电靴安装底座与机车转向架固定连接,其横向位移相比垂向较小,可忽略不计。故本文只考虑集电靴和接触轨的垂向运动。集电靴结构如图1所示。

图1 集电靴结构示意图
根据虚位移原理可得
( 1 )
式中:k为扭转弹簧的刚度;c为扭转弹簧的阻尼;Ib为摆臂的转动惯量;m为摆臂的质量;M为滑靴的质量;θ为扭转弹簧的转角;u1为摆臂的竖向位移;u2为滑靴的竖向位移;Fc为靴轨之间的接触力;F0为受电靴处于水平工作位置时,扭转弹簧的初始抬升力。
由于θ比较小,可认为sinθ=θ,因此可得
( 2 )
式中:L1为摆臂质心到扭轴的距离;L2为滑靴质心到扭轴的距离;u1为摆臂的垂向位移;u2为滑靴的垂向位移;θ为摆臂相对初始位置的转角,数值与扭转弹簧转角相等。其中,u1和u2的关系为
u1/u2=L1/L2
( 3 )
将式( 2 )和式( 3 )代入式( 1 )可得
( 4 )
由于δu20,因此有
( 5 )
由式( 5 )可以看出,集电靴是一个单自由度的弹簧-阻尼振子,因此,可以建立它的等效模型为一质量块模型,如图2所示。

图2 集电靴等效模型
集电靴动力学方程为
( 6 )
式中:m1=m(L12/L22)+(Ib/L22)+M;c1=c/L22;k1=k/L22;us为集电靴在接触点处的垂向位移。
2 接触轨系统模型的建立
接触轨系统主要由钢铝复合轨、支撑结构(绝缘支架和支架底座)、中间接头和膨胀接头等零部件组成。本文采用梁单元模拟钢铝复合轨,质点单元、弹簧单元和阻尼单元模拟支撑结构,质点单元模拟中间接头和膨胀接头,建立精确的接触轨系统模型。
2.1 钢铝复合接触轨模型
接触轨的轴向(沿线路方向)尺寸远小于横向(垂直于轴线方向)尺寸,且受到集电靴的垂向作用力,从而产生弯曲变形,故选用梁单元建立接触轨模型,其截面有限元模型如图3所示。图3中,钢铝复合接触轨由两种材料组成,蓝色、紫色部分分别代表铝合金和不锈钢材料,不锈钢带直接与受流器进行接触。

图3 接触轨截面有限元模型
2.2 接触轨支撑结构模型
接触轨支撑结构主要包括绝缘支架和支架底座两部分,如图4(a)所示。为简化计算,本文仅考虑集电靴和接触轨的相互作用,利用应变能等效原理和动能等效原理将接触轨绝缘支架等效为含有集中质量的弹簧,支撑结构的力学模型如图4(b)所示。

图4 接触轨支撑结构力学模型
其中,绝缘支架横梁AB和立柱BC长度分别为l3和l2,支架底座CD长度为l1。绝缘支架横梁的抗弯刚度为E3I3,截面面积为A3,线密度为ρ3;绝缘支架立柱的抗弯刚度为E2I2,截面面积为A2,线密度为ρ2;支架底座的抗弯刚度为E1I1,截面面积为A1,线密度为ρ1。
(1)绝缘支架等效刚度和等效质量
由文献[8],根据应变能相等原理和卡式定理,可得等效刚度kj为
( 7 )
根据动能等效定理,可得等效质量mj为
( 8 )
式中:k2、k3分别为E2I2、E3I3。
绝缘支架等效模型如图5所示。

图5 绝缘支架等效模型
(2)支架底座等效刚度和等效质量
采用悬臂梁模拟支架底座的模型。设悬臂梁的单位长度质量为ρ1,弹性模量为E1,截面惯性矩为I1,长度为l1。由悬臂梁挠度公式和等效刚度定义,可得悬臂梁端部的等效刚度为
( 9 )
式中:E1I1为悬臂梁抗弯刚度;l1为悬臂梁长度。
根据材料力学和振动力学可知,支架底座的等效质量为
不锈钢阴极板自采用以来,被证明是一种可靠的阴极铜生产技术,阴极板在电解精炼中的使用寿命可超过15年,因此被认为是一种固定资产,而不是一种耗材,但由于使用年限及机械碰撞等综合因素影响,阴极板的悬垂度将逐渐发生偏移[6-7]。
(10)
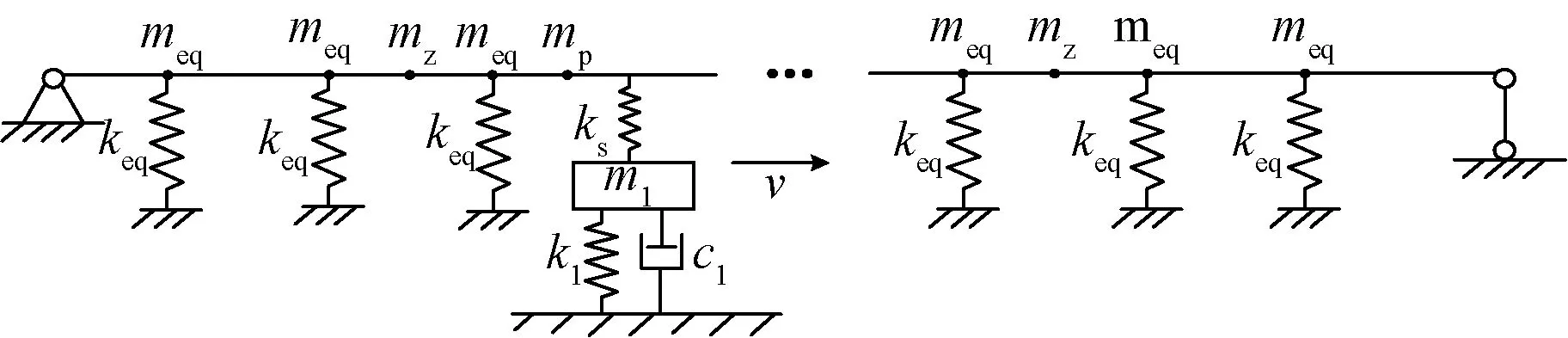
2.3 接触轨系统模型
基于已建立的各种等效模型,将接触轨的中间接头和膨胀接头等效成质点,建立的接触轨力学模型如图6所示。图中,mz为中间接头等效质量;mp为膨胀接头等效质量;meq为绝缘支架和支架底座的等效质量;keq为绝缘支架和支架底座的等效刚度。

图6 接触轨力学模型
通过组装相邻梁单元、弹簧单元和质量单元,可得接触轨的动力学方程为
(11)

3 靴轨系统耦合模型
3.1 靴轨耦合系统接触模型
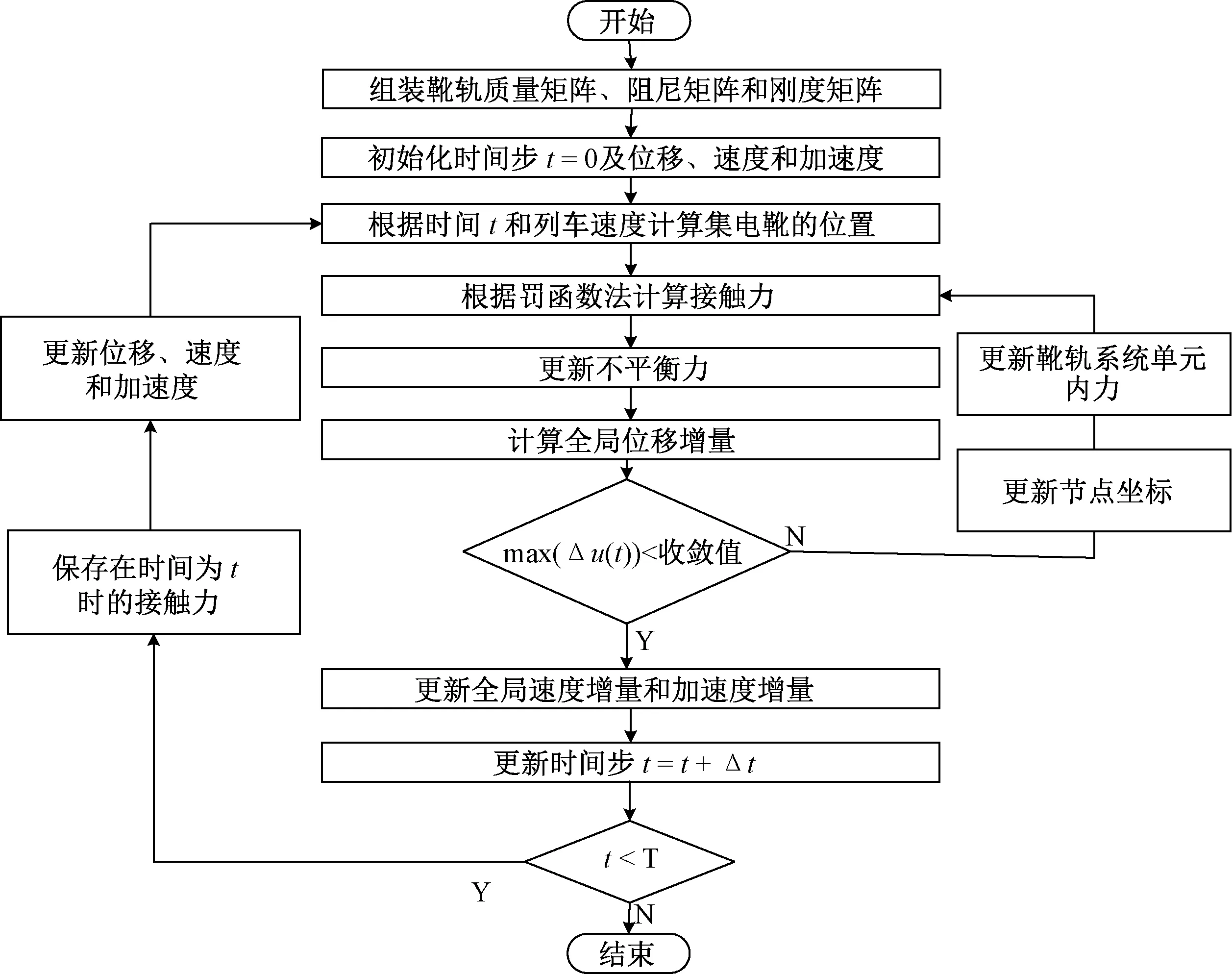
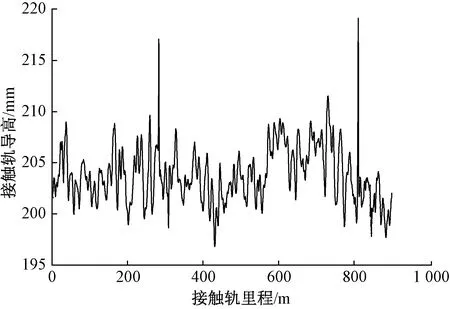
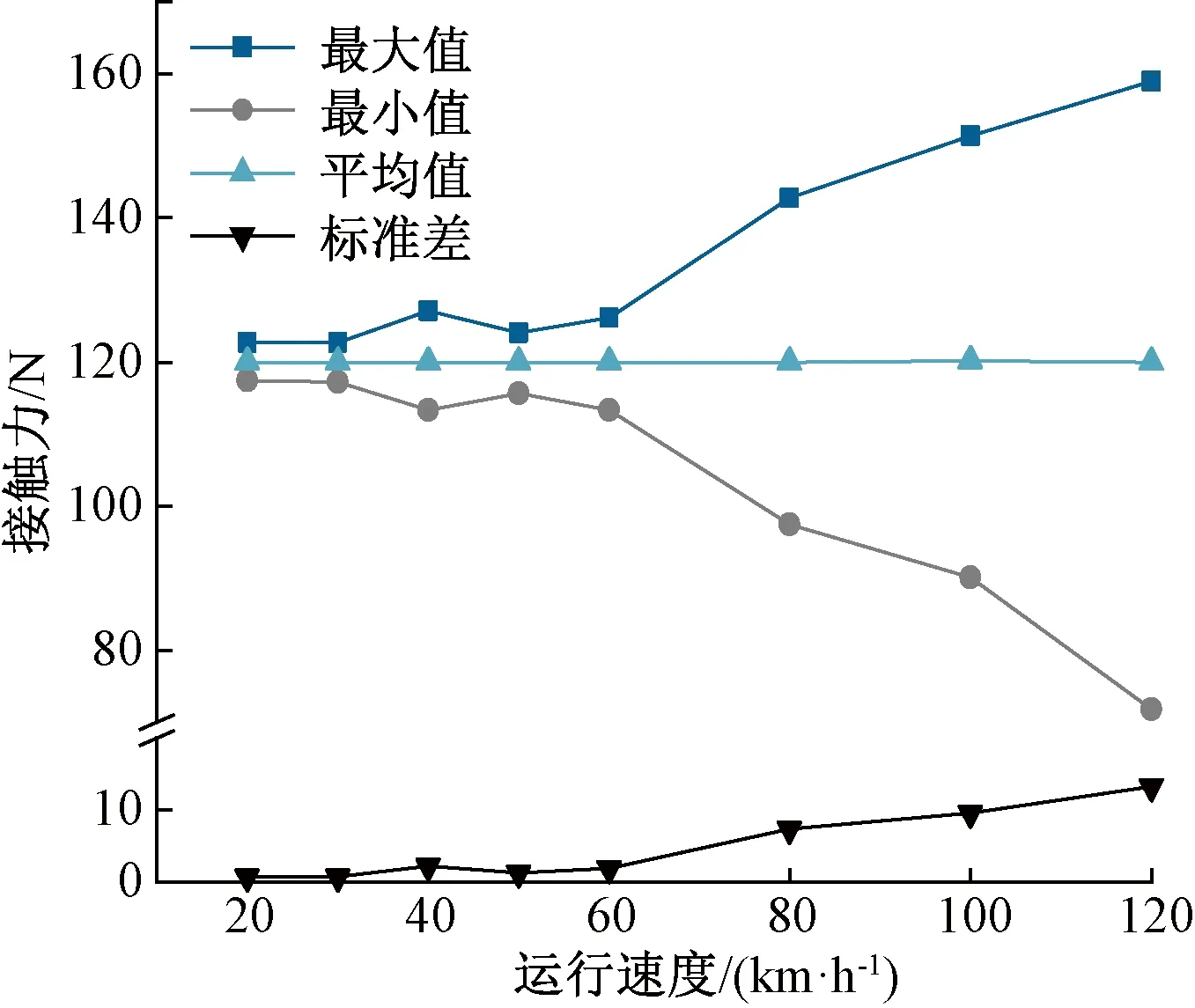
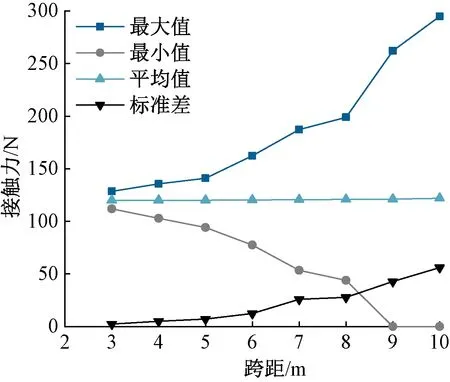
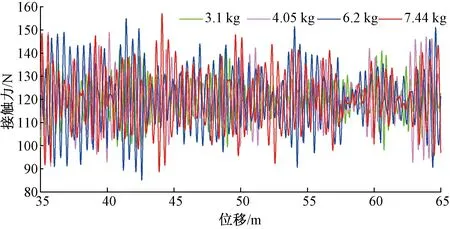
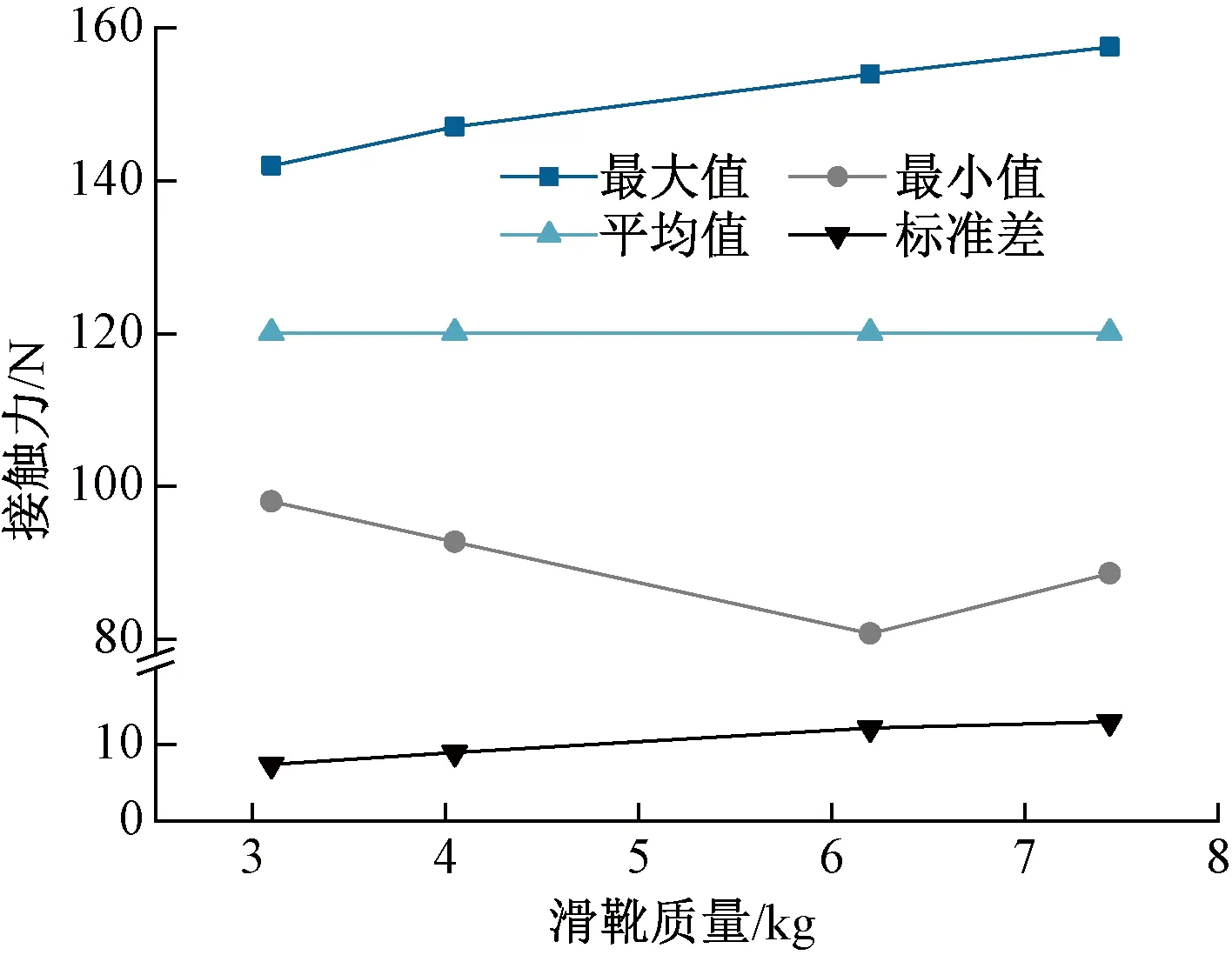
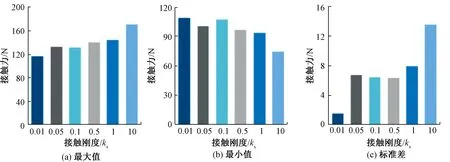
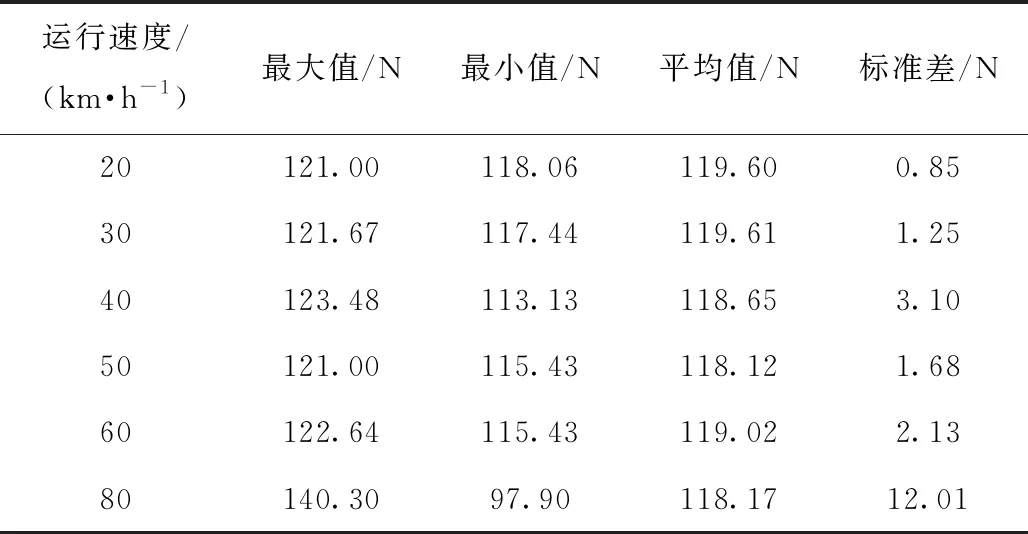
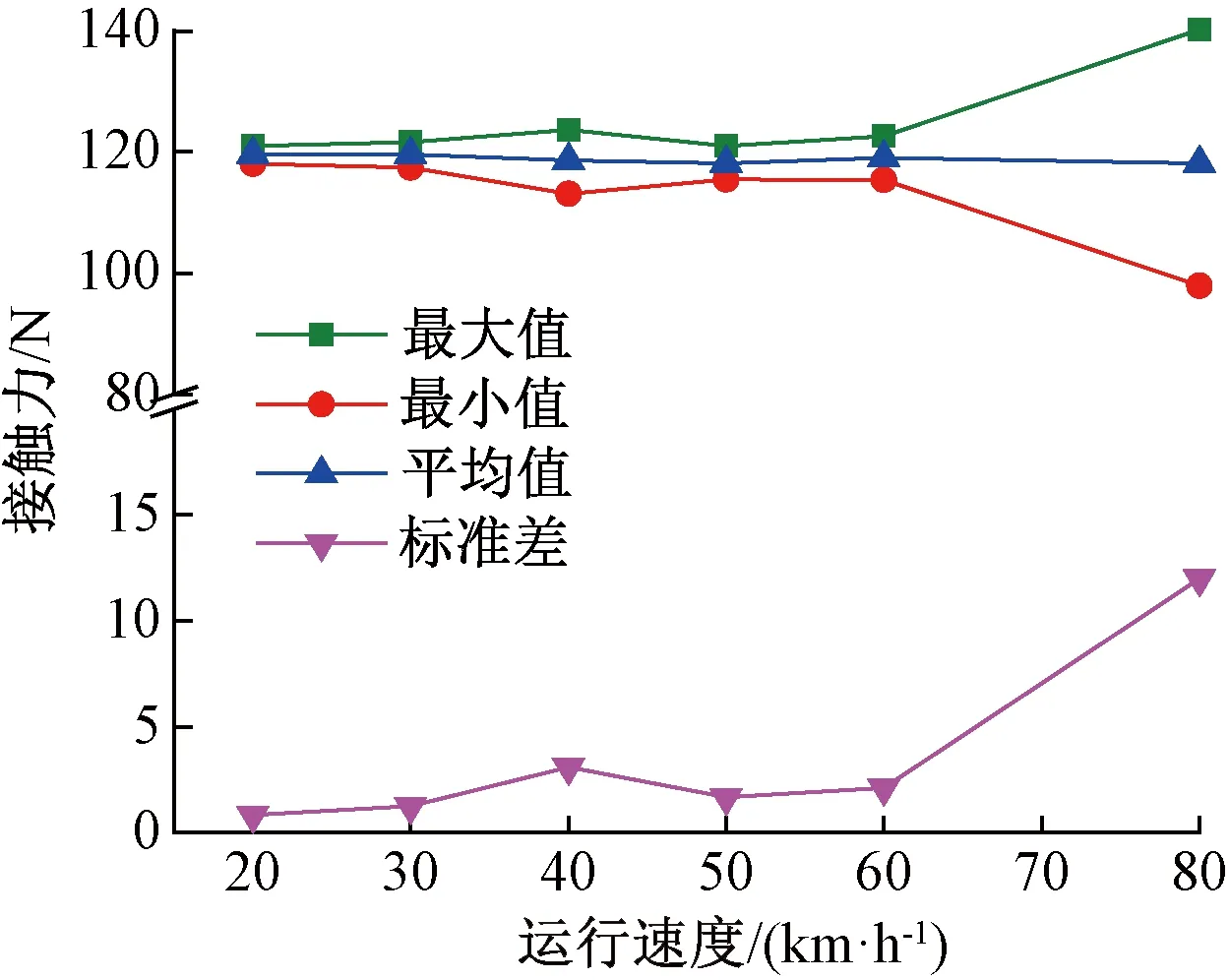
集电靴与接触轨通过接触力Fc进行耦合。本文选择罚函数法,描述靴轨之间的耦合作用力,靴轨接触力根据接触刚度ks和渗透位移Δx=us-uc计算,如式(12)所示。图7为接触模型,假设接触轨在接触点处的垂向位移为uc,滑靴在接触点处的垂向位移为us,若uc 图7 接触模型 图8 靴轨耦合系统有限元仿真模型 图9 靴轨耦合动力学模型 (12) 根据上述建立的集电靴模型和接触轨模型,联立式( 6 )和式(11)可得靴轨耦合动力学方程为 Mscxsc+Cscxsc+Kscxsc=Fsc (13) 式中:Msc=diag(MC,m1);Csc=diag(CC,c1);Ksc=diag(KC,k1);xsc=[uC,us];Fsc为外力向量。 图10为靴轨耦合模型的接触力求解过程。在动态求解的每个时间步内,根据时间和列车运行速度计算接触力在接触轨上的作用点和大小,使用Newmark法求解靴轨耦合动力学方程,获得接触轨和集电靴的节点位移增量。其中接触力的大小采用罚函数法,通过接触轨接触点的位移和集电靴滑靴的抬升进行计算。利用牛顿-拉夫逊法保证接触力的精确度,直到Δu(t)小于收敛值才进入下一个时间步,并将接触力输出进行保存,同时更新集电靴的位置。 图10 靴轨耦合系统接触力求解流程 获取广州地铁五号线从滘口到文冲上行路段之间的接触轨不平顺和接触力的实测数据。地铁接触轨不平顺波形如图11所示,统计结果见表1,接触力的实测数据见表2。 图11 接触轨不平顺波形 表1 接触轨不平顺统计值 mm 表2 仿真结果和实测数据比较 由表2可以看出,速度为80 km/h时,接触力仿真结果与实测数据存在差异,但误差均在允许范围内,说明本文建立的靴轨系统仿真模型是合理的。 为获得稳定的受流质量,滑靴与接触轨之间需存在一定的接触力。当接触力过小,接触电阻变大,将产生较大的能耗和电热,易造成滑靴与接触轨的脱离,导致靴轨离线并产生电弧,造成靴轨接触面的烧蚀;反之,接触压力过大,滑靴和接触轨之间的磨耗将增大,缩短靴轨的使用寿命。因此,为提高靴轨系统受流质量,必须研究列车运行速度、接触轨跨距、滑靴质量等参数对受流质量的影响。 (1)列车运行速度的影响 接触轨跨距为5 m、跨数为20跨时,分析不同运行速度对靴轨接触力运行状态的影响,如图12、图13所示。 图12 不同运行速度下靴轨接触力波形 图13 不同运行速度下接触力变化 由图12可知,在列车运行过程中,靴轨之间的接触力以跨距为周期,接触力的最大值均出现在定位点处,最小值出现在跨中,在40、80、120 km/h速度下这种现象更加明显。此外,集电靴在0~120 km/h速度范围内,接触力最小值均大于0,未发生靴轨离线现象,集电靴和接触轨之间的接触状态良好。 由图13可知,随着运行速度的提升,接触力的波动总体上是增加的,但是在运行速度为40 km/h的情况下,接触力的标准差、最大值和最小值出现了极值,这是由于在该运行速度下,跨距激励频率和集电靴的一阶固有频率接近,发生了共振现象。跨距激励频率可以表示为 (14) 式中:f为跨距激励频率,Hz;v为集电靴运行速度,km/h;l为跨距长度,m。 当集电靴运行速度为40 km/h时,接触轨的跨距激励频率为2.22 Hz,而集电靴的固有频率为2.25 Hz,两者频率非常接近,从而产生了共振现象。因此,在列车运行时,应该避免运行在共振速度下。 (2)接触轨跨距的影响 传统观点认为集电靴的运行速度与接触轨跨距有关。当速度较低时,可采用较大的跨距,反之,则采用较小的跨距。为了研究跨距的变化对靴轨系统动力特性的影响,在120 km/h运行速度下,分析不同跨距值时接触力的变化趋势,仿真结果如图14所示。通过分析可知,跨距为3 m时,接触力的标准差最小,动态受流质量最好;跨距为9 m时,动态受流质量明显变差。 图14 不同跨距下的靴轨接触力波形图 由图15可知,随着接触轨跨距的增加,接触力的标准差、最大值增加,最小值减小,当跨距增加到9 m时,最小值降低到零,说明靴轨离线,不满足靴轨受流要求。当跨距大于5 m时,接触力标准差、最大值曲线的斜率急剧增加,靴轨的动态性能急剧恶化。因此,接触轨跨距的设置应小于8 m。 图15 不同跨距下的接触力变化图 (3)滑靴质量的影响 在运行速度为120 km/h、跨距为5 m、跨数为20跨时,不同滑靴质量下靴轨接触力曲线如图16所示,接触力的最大值、最小值、平均值以及标准差与滑靴质量的关系,如图17所示。 图16 不同滑靴质量下的接触力曲线 图17 滑靴质量影响下的接触力变化 由图16可以看出,随着滑靴质量的增加,接触力波动越来越剧烈。由图17可知,在列车运行过程中,随着滑靴质量的增加,接触力的最大值和标准差逐渐增大,集电靴的振动越剧烈,受流质量变差。因此,在保证集电靴的结构满足强度要求下,尽量使用密度小、导电率高的材料制造集电靴的摆臂及滑靴,从而减轻系统的振动剧烈程度,提高靴轨系统的受流质量。 (4)支撑结构刚度的影响 由于在线路施工过程中接触轨与轨道之间不平行,需要调节支架底座的长度,使得接触轨与轨道平行或接近平行,由此,会造成支撑结构的等效参数不同,需要研究支撑结构刚度对接触力的影响。 在运行速度为120 km/h、跨距为5 m、跨数为20跨时,改变接触轨支撑结构的等效刚度,研究不同刚度下的接触力波动情况,接触力最大值、最小值和标准差如图18所示。 图18 支撑刚度影响下的接触力变化 由图18可以看出,随着支撑刚度的增加,接触力的最大值、标准差和平均值均呈减小的趋势,最小值呈增大的趋势。最大值和标准差减小,最小值增大,这对改善靴轨受流是有利的。支撑刚度从1.0×105N/m增加到4.0×105N/m时,标准差从55 N下降到29 N;而支撑刚度从4.0×105N/m增加到3.0×107N/m时,标准差从29 N下降到15 N,虽然增加支撑刚度对靴轨受流质量有改善,但是当支撑刚度增加到4.0×105N/m时,继续增加接触刚度对提升受流质量影响不大。 (5)靴轨接触刚度的影响 滑靴接触面的粗糙度及滑靴和接触轨本身的弹性决定了靴轨接触刚度,列车在运行过程滑靴与接触轨的滑动摩擦会改变滑靴接触面的粗糙度[19]。所以,接触刚度并不是一个定值,接触刚度会随着列车运行里程的改变而变化。因此,需要研究接触刚度对靴轨受流质量的影响。 在其他条件不变,改变接触刚度时,研究接触力的最大值、最小值以及标准差与靴轨接触刚度的对应关系,接触力随接触刚度变化如图19所示。 图19 接触刚度影响下的接触力变化 由图19可以看出,靴轨接触刚度越大,接触力的最大值越大,最小值越小,标准差越大;当接触刚度在0.05ks(其中ks=1×106N/m)和1ks之间时,接触刚度增大,接触力标准差变化不大。 为验证集电靴在不同运行速度下靴轨接触力的变化规律,采用广州地铁五号线从滘口到文冲上行路段之间不同运行速度下的实测靴轨接触力统计值,对本文所得规律进行验证,见表3。 表3 不同速度下靴轨接触力统计值 根据表3可得不同运行速度下的接触力变化,如图20所示。 图20 不同运行速度下接触力变化 由图20可知,随着运行速度的提升,接触力的波动总体上是增加的,但是在运行速度40 km/h情况下,接触力的标准差、最大值和最小值均出现了极值。此规律和文中数值仿真结果相吻合,只是实测数据的数值相比于仿真数值偏大,原因在于现场存在诸多干扰因素,导致靴轨接触力偏大。 本文以靴轨受流系统为研究对象,推导集电靴和接触轨支撑结构的质量块等效模型,采用罚函数接触算法,考虑接触轨的支撑结构、中间接头和膨胀接头等实际零部件,建立精确的靴轨耦合模型,通过仿真结果与广州地铁实测数据对比,验证了靴轨模型的准确性和可靠性。在此基础上,研究列车运行速度、接触轨跨距、滑靴质量、支撑刚度等参数和靴轨接触力之间的关系,得出以下结论: (1)随着列车运行速度的提升,靴轨受流系统的振动越来越剧烈。 (2)当运行速度为40 km/h时,跨距激励频率和集电靴的固有频率非常接近,靴轨系统容易发生共振,此时容易造成集电靴的破坏,为避免集电靴的损坏,列车应避免长期处于共振速度状态下运行。 (3)随着接触轨跨距的增加,受流质量逐渐变差,当跨距达到10 m时,靴轨之间多次出现离线。 (4)滑靴质量的增大和支撑刚度的减小都会恶化靴轨受流质量,选用质量较小的滑靴,刚度较大的支撑结构有利于靴轨受流。

3.2 靴轨耦合系统计算过程
3.3 靴轨耦合模型的验证


4 靴轨系统的力学特性
4.1 不同结构参数的影响规律研究



4.2 参数影响规律验证
5 结论
猜你喜欢
汽车实用技术(2022年11期)2022-06-20
保健医苑(2022年5期)2022-06-10
小猕猴智力画刊(2022年4期)2022-05-25
现代仪器与医疗(2022年1期)2022-04-19
小哥白尼(趣味科学)(2021年8期)2021-11-20
中学生百科·大语文(2021年4期)2021-05-12
计算机技术与发展(2020年9期)2020-11-26
数学学习与研究(2018年14期)2018-10-29
智慧少年(2016年2期)2016-06-24
中学数学杂志(初中版)(2014年1期)2014-02-28
