
三维激光扫描技术在城市地下空间开发利用中的作用
2021-10-12 10:00段文义孙德勇段志义孔维亮陈寅
锦绣·下旬刊 2021年10期
段文义 孙德勇 段志义 孔维亮 陈寅
摘要:目前我国十分重视对城市地下空间的利用,无论是利用率还是利用方式都在不断加大。然而,部分城市在利用地下空间的过程中,明显缺乏统一的规划,以至于很多地下空间没有得到充分的利用及管理,这些问题的存在势必会给智慧城市的建设留下隐患。因此为了的城市地下空间利用必然会呈现出多元化发展的趋势,地下空间利用的合理性及管理问题也必将成为社会关注的重点。
关键词:三维激光扫描技术;城市地下空间;开发利用;三维模型
为能更加合理、有序的开发使用城市的地下空间,改变现有的经济发展形式、推进新型城市建设进程,拓展城市空间、提高城市空间利用率。与此同时,还能够提升城市的防护能力,实现人防和民防的一体化,落实环境保护策略,促进生态文明城市的建成。某市自然资源管理部门及和城市规划局共同决定开展该市的地下空间[1],普查一体化建设,具体项目内容如下:
1)探明本次项目范围内已有地下空间的具体范围;
2)采集地下空间的三维点云数据、属性及纹理信息;
3)实现与该市三维平台的无缝对接,建立地下空间利用及停车泊位专题普查。
1 资料收集与属性调查
收集竣工和专项统计资料,对已建成区内截止项目开展前已有地下空间的利用情况进行调查和统计,普查的内容包括面积、层高、停车数量、人防工程、项目状态等信息,对地下出入口的空间位置和类别进行了调查,采集坐标出入口坐标和照片信息。根据已有资料分析,调查建成区范围内停车泊位分布数量、属性及其空间分布情况。
2 控制测量
控制测量可分为地面及地下两个部分,地面的平面控制测量拟布设为一级GNSS RTK点,采用网络RTK测量方式,地面高程控制测量采用四等水准方式进行测量,布设四等水准网或附和水准路线;地下平面控制测量拟布设为一级GNSS RTK点,采用网络RTK测量方式,利用ZJCORS进行测量,地下高程控制测量采用四等水准方式进行测量,布设四等水准网或附和水准路线[2]。
3 点云数据采集
3.1 主要技术指标及原理
三维激光扫描点云精度及技术指标根据《CH/Z 3017-2015地面三维激光扫描作业技术规程》必须满足三维激光扫描点的云精度及技术指标要求。
扫描作业时应该符合下列规定:满足相邻测站间有效点云的重叠度不低于30%,困难区域不低于15%的要求;应根据项目名称、扫描日期、扫描站点等信息命名扫描站点,存储扫描数据,并在草图上标注测站位置。
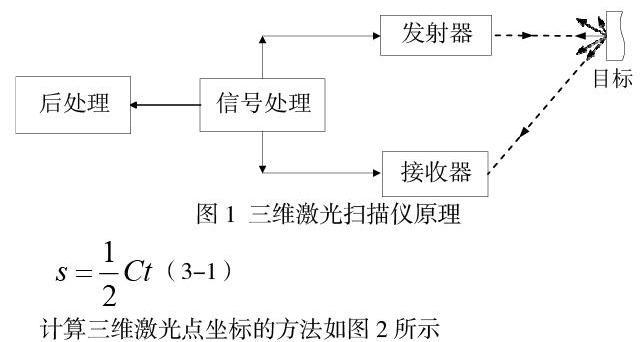
其简单的工作原理如图1所示:首先由激光脉冲发射器发射激光脉冲信号,通过扫描镜的旋转射向目标,然后接收器接收由目标反射回的信号,测得激光脉冲的水平角α、垂直角θ,并记录发射与接收时间,确定激光脉冲从扫描中心至被测目标往返一次的时间t,又知道光速C是常量,所以扫描中心到被测目标的距离S的计算公式为(3-1)。
计算三维激光点坐标的方法如图2所示
3.2 硬件方案
三维激光扫描也叫“实景复制技术”,它是二十世纪九十年代的中期才出现的高新技术,也是测绘领域在完成全球定位系统技术后新的技术革命。它具有非接触、主动性、穿透性、扫描速度快、高精度、高分辨率、全天候、全数字化等特点,在地下空间测绘中展现出了非常大的优势。三维激光扫描系统根据承載平台的不同分为机载、车载、地面、背包式、推车式及手持式等类型,其中适用于地下空间数据采集的是基站式的地面扫描仪和基于SLAM技术的背包式扫描仪[3]。
根据激光测距原理的不同三维激光扫描仪可以分为三种类型:基于脉冲测距法原理、基于激光三角法原理和基于干涉测距法原理。目前,基于脉冲测距法原理的扫描仪在测绘领域中使用最为广泛,本项目数据采集使用的三维激光扫描仪Z+F5016即为基于脉冲式测距法的扫描仪。
4 点云数据预处理
4.1 点云配准
点云配准主要有基于ICP的配准和基于特征的配准两种方法。其中基于ICP的配准方法比基于特征的配准度要高。本项目中点云配准拟使用Z+F5016配套的软件Z+F Control,它的配准方法是基于ICP的配准,配准过程分为初始配准、精确配准两步。初始配准是为了防止点云间的旋转及平移错位,以便获得更加精准的配准结果,同时还能减少的次数,节约更多的时间。精确配以ICP算法为标准,这样能够有效降低多站点云数据间的配准误差。
4.2 坐标转换
通过点云配准已将多测站点云大数据拼接成一个整体,此时的坐标系统为扫描仪扫描系统,通过控制点可将坐标系统转换成国家2000坐标系或者当地独立坐标系。
4.3 去除噪点
点云去噪是指将点云大数据里的错误或误差数据去掉。噪声是由仪器自身、扫描的环境及目标物体的表面介质等因素共同作用而产生,根据产生原因可将噪声分为三种:首先是仪器系统误差,它是由于仪器内部的系统中存在缺陷及性能上的问题等引发的误差;其次是受到被测目标的影响而产生的误差,主要有扫描实体外轮廓面的材质构成、激光的吸收状况、外表面粗糙度、纹路、色泽、反射率等;最后是受到偶然因素或者不可预知的因素影响所产生的误差,比如扫描过程中受到车辆、行人或者树木的遮挡产生的误差。
较为光滑的地下车库所产生的噪声被称为镜面噪声点,这部分噪声能够通过再次回波或其他回波方式过滤掉。
5 纹理图像采集
纹理数据采集可分为标准纹理数据的采集,外业纹理数据的采集。
(1)标准纹理数据的采集。
部分地下建筑物的纹理会比较单一,地面是水泥地,墙体呈乳白色,因此在采集纹理数据的过程中,地面、墙体及顶板只需根据标准纹理库当中的标准纹理快速建模即可。
(2)外业纹理数据的采集。
特殊的地下建筑物(比如地下通道或者地下商场)内部就会有很多装饰物,色彩也会存在变化,在采集这部分纹理数据时,可借助彩色激光扫描仪或数码相机等设备完成工作。在拍摄照片时,由于空间视角的影响,拍摄物体出现了倾斜现象,在贴纹理之前则需使用Photoshop软件对照片进行纠正处理;照片需要进行专门的整理和编号,编号应包含能清楚的辨别地下空间的位置关系;所有纹理的尺寸必须保持为2的N次方,尺寸限制在1024*1024以内,并且保持长与宽的差距不能过大;保证区域范围内整体色调的一致性。
参考文献
[1]陶维刚.数字城市建设中三维城市模型制作方法研究[J].江西测绘,2014(1):30-31.
[2]黄承亮,向娟.三维激光扫描技术应用于建筑物建模的测量方法研究[J].城市勘察,2011(1):87-90.
[3]钱尊岩,孙钟磊.三维激光扫描技术在城市地下空间建模中的应用[J].北京测绘,2019,33(11):1340-1343
[4]戴俊杰,胡平昌,郭震冬.基于三维激光扫描技术的地下建筑物测量方法研究[J].现代测绘,2013,36(SI):25-27.
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21
电脑知识与技术(2016年26期)2016-11-24
企业导报(2016年20期)2016-11-05
商业会计(2016年13期)2016-10-20
科学与财富(2016年28期)2016-10-14
科技视界(2016年13期)2016-06-13
企业导报(2016年6期)2016-04-21
科技视界(2016年4期)2016-02-22
科技视界(2015年25期)2015-09-01
