
基于改进滑动时间窗口的国产民用飞机APM参数筛选研究
2021-11-01 12:43钱宇王立新刘瑜
航空工程进展 2021年5期
钱宇,王立新,刘瑜
(中国民用航空飞行学院飞行技术学院,广汉618307)
0 引 言
随着国产ARJ21飞机的运营逐渐步入正轨以及C919飞机[1]的成功研发,标志着我国民用飞机设计及运行水平不断提升。飞机性能监控(Air‐craft Performance Monitoring,简称APM)是对稳定巡航状态下飞机性能参数进行检测,可及时了解飞机性能的衰减情况,以便航空公司提前做好保障工作,保障飞行安全性和提升运行效率。
飞机性能监测工作主要是通过性能软件来完成,即通过参数筛选以获取飞机性能分析计算所需源数据,计算燃油里程、所需推力、燃油流量及所需功率四个性能指标,并与飞机制造厂商给定的标准进行对比,得到飞机性能衰减系数。APM模块主要集成在飞机性能软件中,由民用飞机制造厂商研发并提供给用户,国产民用飞机ARJ21飞机的性能软件未包含APM模块,C919飞机的性能软件在研发时已经将APM模块作为必备功能之一。
目前研究者对APM参数筛选的研究文献较少。黄磊[2]展示了快速存取记录器(Quick Access Recorder,简称QAR)数据处理模块界面,但并未对巡航参数筛选过程及算法进行讨论。滑动时间窗口最早被应用于数据流控制,随着技术的不断发展,后来也逐渐被广泛应用于模式识别[3]和时间序列[4]分析领域。吴家皋等[5]提出了改进滑动窗口轨迹数据压缩算法,可有效缩短压缩时间,但APM参数筛选所用判据与该文献采用的判据并不相同;丁松涛等[6]针对滑动窗口遍历搜索耗时的问题,提出基于STIP的交通多目标感兴趣区域快速检测算法,但该方法对需要遍历全部数据的问题优势不明显,APM参数筛选需要遍历当前窗口内某列数据的所有值;张毅等[7]通过改变滑动时间窗口的窗体大小、步长及位置交换范围这三个参数值,有效提高了飞机在终端区的排序效率,但APM参数筛选则需将这三个参数设为固定值。
本文将滑动时间窗口参数设为固定值,并采用特定的稳定巡航参数筛选判别标准对巡航飞机性能监控参数筛选进行研究。在系统干扰噪声条件未知的情况下,采用AUKF算法实时更新系统噪声以实现QAR数据降噪;采用改进滑动时间窗口算法对稳定巡航APM所需参数进行筛选,通过国产ARJ21飞机的样本数据对算法进行验证。
1 QAR数据降噪
飞机在巡航阶段由于受到飞行环境等因素变化的影响,导致飞行数据包含噪声。飞行数据的准确性对基于该数据的飞机性能监控至关重要,因此,进行数据处理以提高数据的质量和真实度是性能分析计算的首要问题。本文采用AUKF算法对数据进行降噪处理。
1.1 AUKF算法
UKF可以提高非线性系统数据精度,对线性系统有着同样的效果[8]。采用UKF算法滤波降噪需提前了解系统噪声特性,在实际情况中,往往无法满足此要求,因此,本文在UKF算法中加入Sage-Husa次优无偏极大后验噪声估计器[9-10]的方法对其进行改进,由此构造AUKF算法。AUKF算法可实时更新和修正系统噪声,有效提高滤波降噪的精度[11-12]。
Sage-Husa噪声估计器修正系统噪声的具体过程如式(1)~式(6)所示。

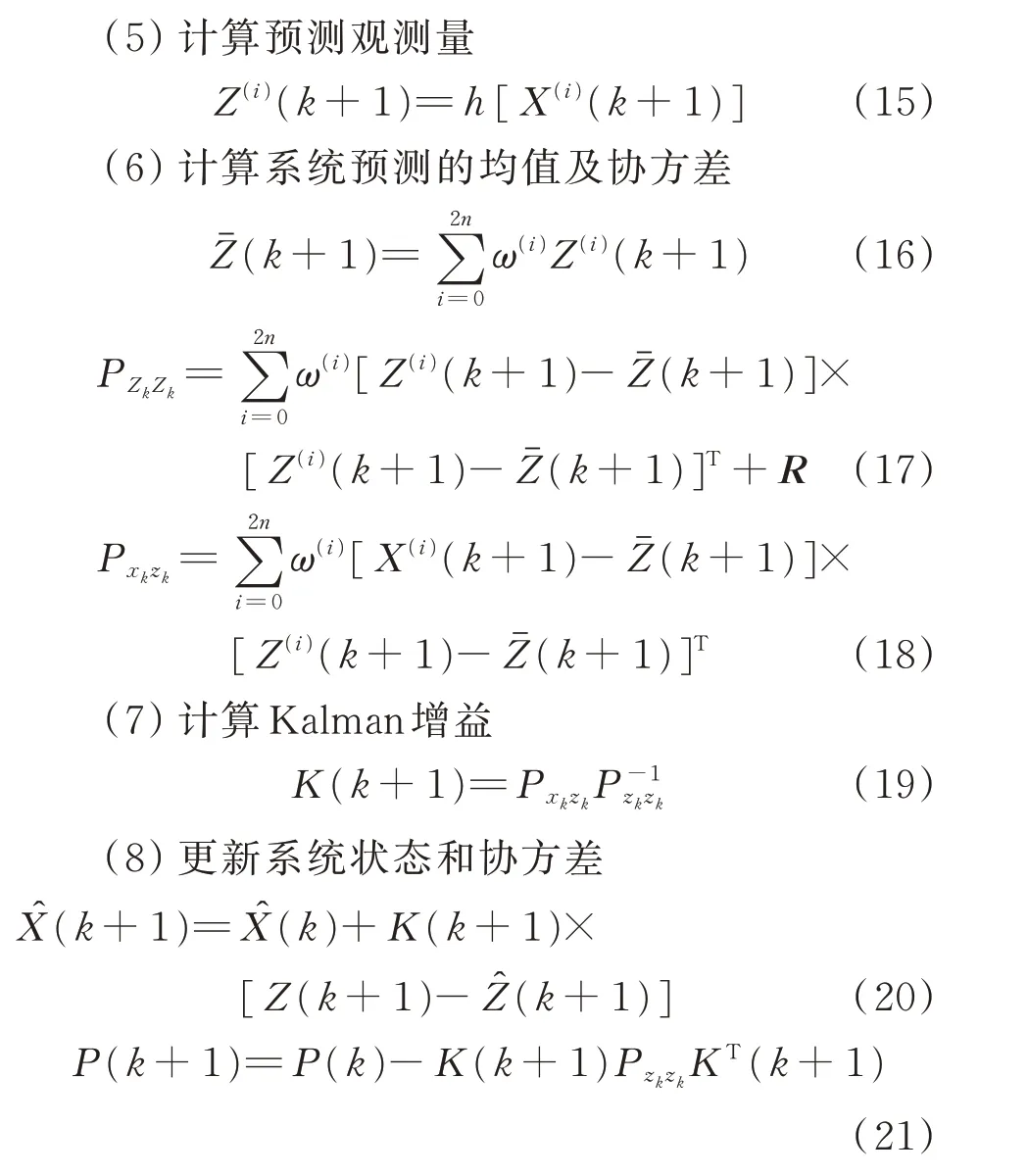
UKF算法摒弃了扩展卡尔曼滤波对非线性系统函数进行线性化的传统做法,采用Kalman线性滤波基本框架,对于一步预测方程,使用无迹变换(Unscented Transform,简称UT)来处理均值和协方差的传递问题,且UKF并没有忽略高阶项,有效提高了滤波的精度和稳定性。
UT变换实现过程如下:
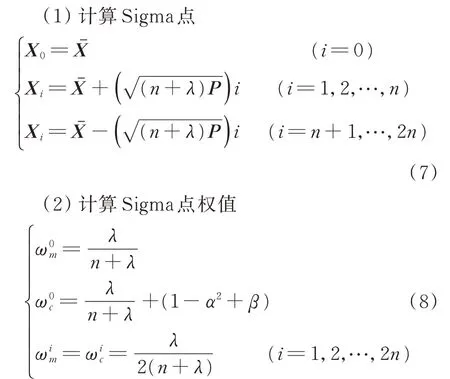
式中:X为Sigma点;n为状态的维数;m为均值;c为协方差;λ为缩放比例参数,λ=α2(n+κ)-n,取值无具体限定,但要保证(n+λ)P为半正定矩阵;α为定参,取值一般为[0,1];β为待选的非负权系数,β≥0。
UKF非线性系统为

式中:f为非线性状态方程函数;h为非线性观测方程函数;W(k)和V(k)为协方差矩阵Q和R的高斯白噪声。
1.2 UKF算法实现QAR数据降噪

2 APM参数筛选
2.1 滑动时间窗口算法
QAR数据是一种典型的时间序列,本文采用滑动时间窗口算法对其进行处理。影响滑动时间窗口算法有效性和运行效率最为重要的三个参数分别为窗口大小、步长及位置交换。窗口大小的确定一般采用人为设定法,缺乏理论基础[13]。步长即窗口每次滑动的长度,当窗口大小固定时,步长越短,则算法运行效率越高,于是步长也是根据具体情况而定。位置交换的位置是由时间序列的长度而定。
对于影响滑动时间窗口算法的这三个参数,主要是由稳定巡航参数筛选方法而定。稳定巡航数据筛选过程为采集巡航段数据、设定稳定时间、建立筛选标准,在巡航段QAR数据中逐行检验后续稳定时间内飞行参数是否超过筛选标准,若未超出,则说明当前稳定时间段内飞机处于稳定巡航工作状态,反之,从下一行开始重复上述过程,直至数据末尾。稳定时间设定为180 s,即稳定时间内数据波动不允许超过给定的波动范围,180 s的稳定时间意味着筛选要求更高,所得源数据点更加可靠。
窗口大小对应于稳定时间为固定值180 s,要求逐行检验巡航段QAR数据,于是步长为1 s,QAR数据的记录方式为1 s记录一次,逐行表示时间窗口每次移动一行。
基于滑动时间窗口算法的参数筛选过程具体如下:
第一步:取QAR数据时间序列的前180行构成初始时间窗口,根据参数筛选标准对窗口内的数据进行筛选,若窗口内数据波动均超出筛选标准,则对当前窗口内数据求均值,得到飞机性能监控计算所需的源数据点,然后执行到下一步,否则直接执行第二步。
第二步:第一步的时间窗口下移步长l,这里的l为1行,即1 s,则当前时间窗口的下边界为180+l,第一步的时间窗口中余下的180-l行数据加上下移的l行构成共计180行数据的新时间窗口,然后重复第一步的筛选过程,并保存源数据点。
第三步:重复第二步,下移窗口,组成新的时间窗口。
第四步:以此类推,重复上述过程,完成数据筛选,获取所有飞机性能监控计算所需的源数据点,滑动时间窗口算法实现数据筛选的流程如图1所示。
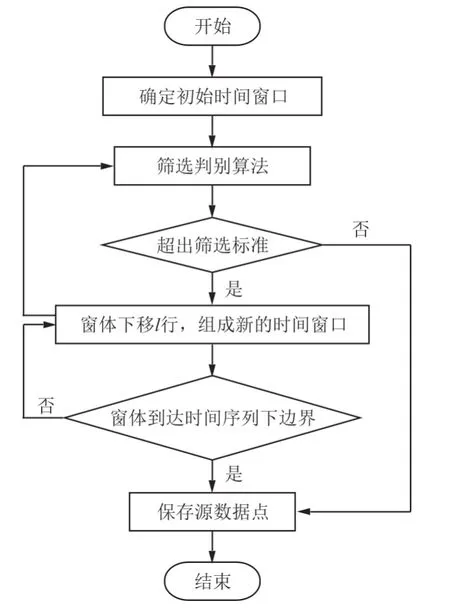
图1 滑动时间窗口算法参数筛选流程图Fig.1 Flow chart of parameter selection for sliding time window algorithm
2.2 改进滑动时间窗口算法
滑动时间窗口算法涉及的三个参数分别为窗口大小、步长及位置交换范围,以上三个参数取值会极大影响算法的运算速度。由稳定巡航参数筛选方法可知,这三个参数为固定值,因此,考虑通过对滑动时间窗口算法中的筛选判别算法进行改进,以提高滑动时间窗口算法数据筛选效率,本文采用递归算法对筛选判别算法进行优化。
递归算法[14-15]指的是直接或者间接调用自身函数,从而使较为复杂的问题得到简化,实质为在执行过程中不断调用自身函数。在编程过程中,该算法可简化大量代码,从而提高算法的运行速度。数据筛选判别算法部分包含数据随机组合和稳定巡航筛选条件判别两部分,采用递归算法对这两部分进行优化,使数据随机组合和参数差值结果判别更快捷,从而提高滑动时间窗口算法数据筛选的效率。
3 仿真算例
本文采用某航空公司ARJ21飞机的实际运行QAR数据样本进行仿真验证。AUKF算法降噪效果验证采用大气总温和马赫数两组样本数据,每组样本的数据量为500;APM参数筛选采用5组样本数据,每个样本50个参数。
3.1 AUKF算法降噪
AUKF算法较UKF算法的优势在于加入Sage-Husa噪声估计器可实时更新修正系统噪声值,从而提高数据降噪的精度和稳定性。UKF算法的噪声初始值分别设定Q=0.01,R=0.25,遗忘因子b=0.96,分别比较AUKF和UKF两种算法的降噪效果,如图2所示。
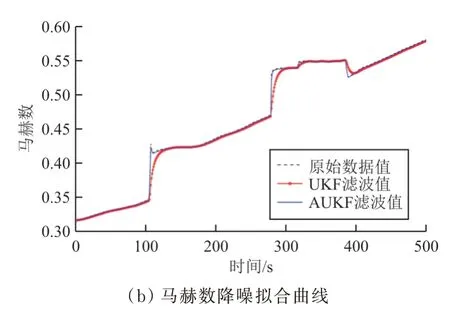
图2 样本数据降噪拟合曲线Fig.2 Fitting curve of sample data noise reduction
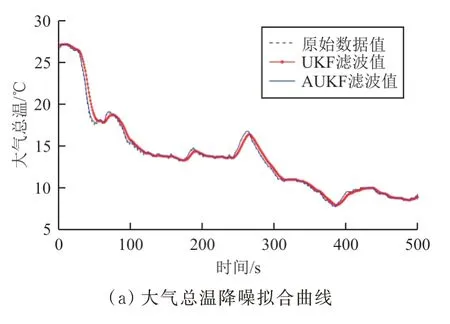
从图2可以看出:AUKF算法降噪曲线更接近原始数据曲线,说明AUKF算法较UKF算法在降噪的同时,保留更加真实的数据信息。
两种算法的降噪误差如图3所示。

图3 样本数据降噪误差曲线Fig.3 Noise reduction error curve of sample data
从图3可以看出:AUKF算法的估计偏差小于UKF算法,说明加入Sage-Husa噪声估计器的AUKF算法可有效提高滤波降噪的精度,提高数据的可靠性。为了更直观地比较两种算法的效果,利用均方根RMSE、信噪比SRN、平滑度R这三个指标对降噪效果进行评估,结果如表1~表2所示。
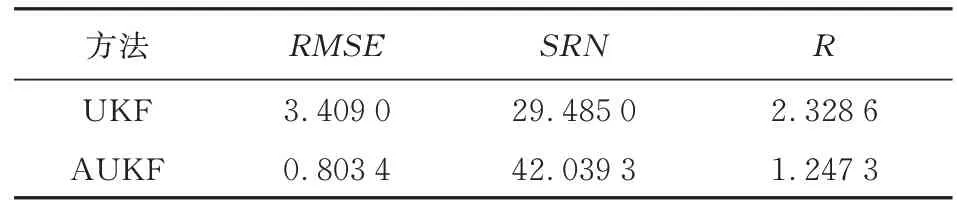
表1 大气总温降噪效果评估Table 1 Evaluation of noise reduction effect of total atmo‐spheric temperature
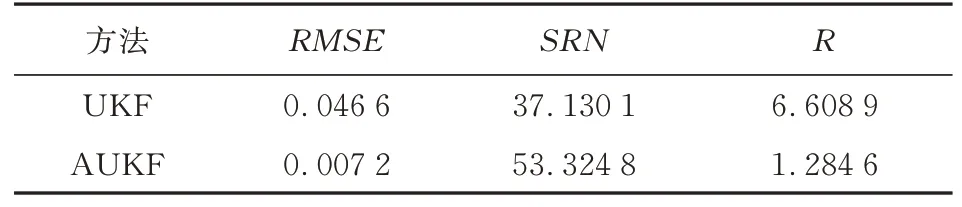
表2 马赫数降噪效果评估Table 2 Effect evaluation of Mach number noise reduction
从表1~表2可以看出:两组数据经UKF算法降噪所得均方根值均大于AUKF算法,UKF算法所得信噪比均小于AUKF算法,说明AUKF算法在降噪滤波的同时可保留更多有效数据信息;UKF算法所得平滑度均大于AUKF算法,说明UKF算法降噪曲线更加平滑,但同时也说明AUKF算法降噪曲线更接近原始曲线,可有效提高数据降噪的精度。因此,本文采用的AUKF算法数据降噪的有效性,可保证数据筛选前的质量和真实性。
3.2 APM参数筛选
根据稳定巡航飞机性能监控参数筛选方法可知,稳定时间设定为180 s,需要确定稳定巡航参数筛选标准,对于国产ARJ21飞机的QAR数据,本文确定筛选的参数包括大气参数、发动机参数及可选参数,其中燃油流量和低压转子转速n1均为两台发动机参数,因此,共计11个参数,具体筛选标准如表3所示(其中1 ft=0.304 8 m,1 kt=1.852 km/h)。
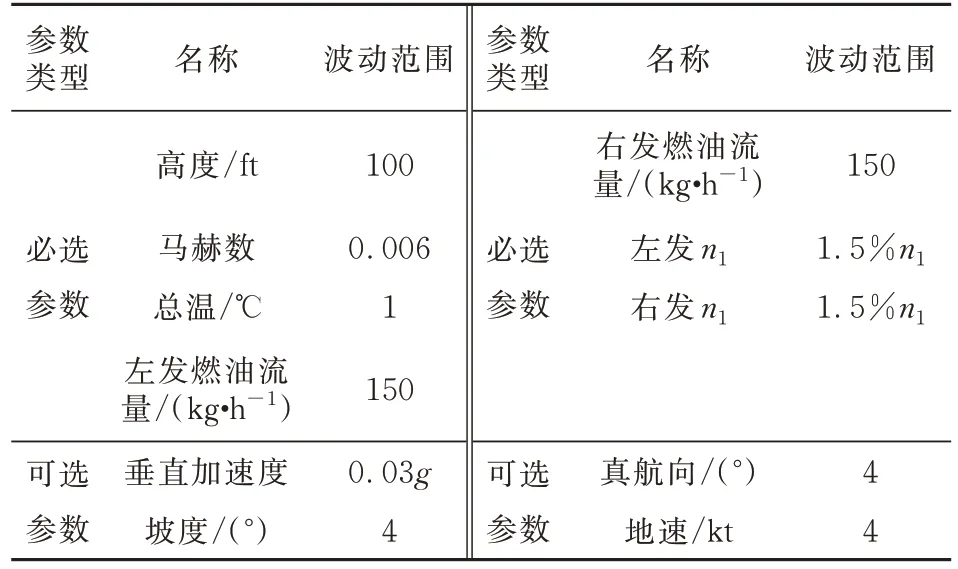
表3 稳定巡航参数筛选标准Table 3 Selection criteria of cruise stability parameters
稳定巡航参数标准要求数据在当前稳定时间内同一参数的任意差值不能超出数据筛选标准,否则视为不满足筛选条件。采用改进和传统滑动时间窗口算法对5组ARJ21飞机的QAR数据样本进行筛选,两种算法筛选结果如表4所示。
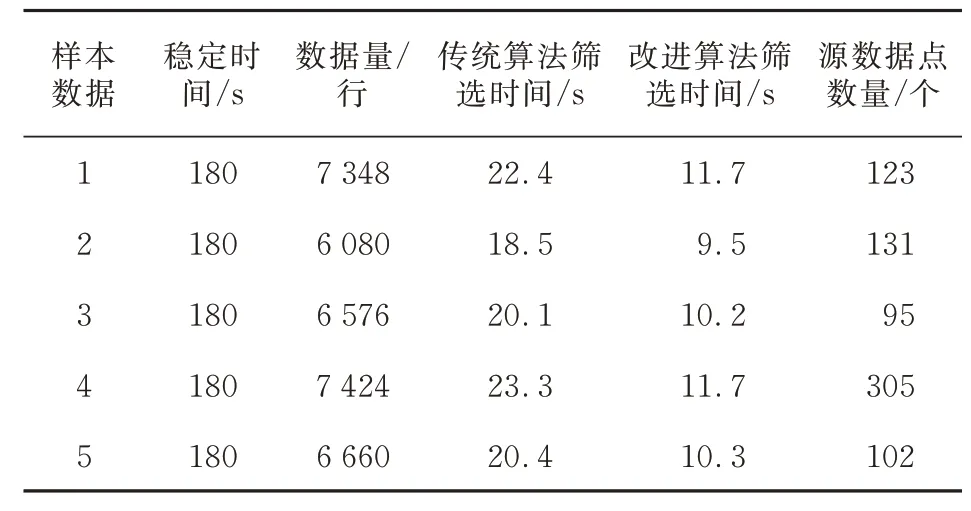
表4 改进和传统滑动时间窗口算法筛选结果对比Table 4 Comparison of filtering results between improved and traditional sliding time window algorithms
从表4可以看出:改进滑动时间窗口算法较传统算法可有效提升数据筛选效率,改进算法的筛选时间只有传统算法的50%,由此说明利用递归算法可有效提高滑动时间窗口算法的运行速度。为了验证改进滑动时间窗口算法的有效性,随机选择了4个满足稳定巡航筛选标准的参数差值与稳定巡航标准进行对比,对比结果如图4所示。
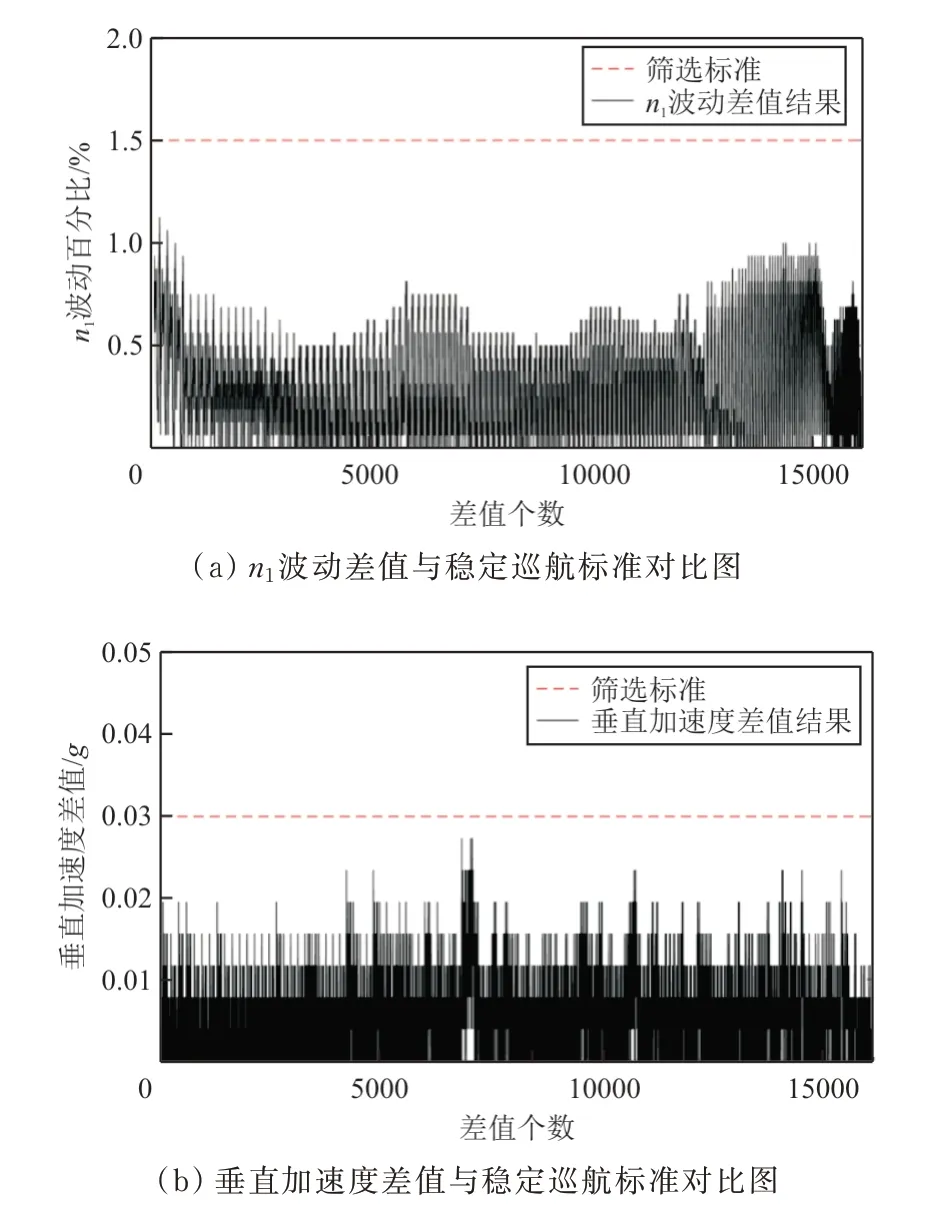
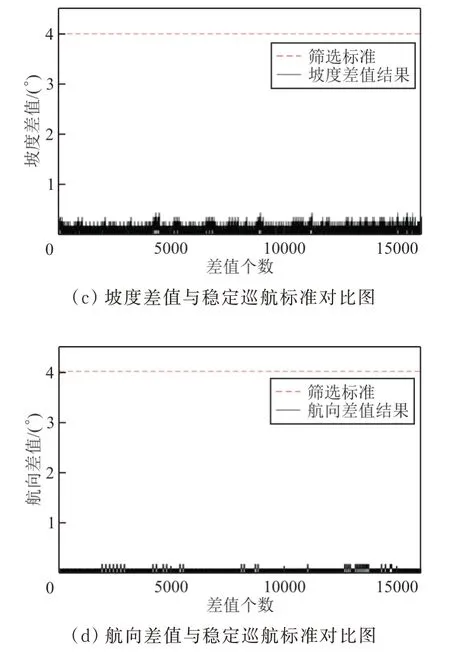
图4 参数差值与稳定巡航标准对比图Fig.4 Comparison chart of parameter difference and stable cruise standard
改进滑动时间窗口算法通过随机选取4个稳定窗口数据进行验证,稳定时间为180 s,即数据随机组合可得差值结果为16 110行。从图4可以看出:4个稳定时间窗口内的数据差值均小于稳定巡航参数筛选标准,由此说明本文采用的改进滑动时间窗口算法可以实现飞机性能监控参数的筛选,且筛选效率更高。
4 结 论
(1)自适应无迹卡尔曼滤波算法能够实时更新修正系统噪声,较无迹卡尔曼滤波算法可有效提高数据滤波降噪的精度和稳定性,降噪后的数据更加真实可靠。
(2)经过递归算法改进的滑动时间窗口算法,可有效提升飞机性能监控参数筛选的效率,筛选时间大约只是传统算法的50%。
(3)本文采用的参数筛选算法有助于提升国产民用飞机C919飞机性能分析软件APM模块的运算速度,促进国产民机运行支持效率。
猜你喜欢
电脑报(2022年24期)2022-07-01
舰船科学技术(2021年12期)2021-03-29
科学大观园(2019年10期)2019-09-10
证券市场周刊(2019年18期)2019-08-17
证券市场周刊(2019年19期)2019-05-27
中国经济周刊(2019年9期)2019-05-24
科技资讯(2016年18期)2016-11-15
饮食科学(2016年7期)2016-07-27
学生之友·最作文(2014年5期)2014-07-09
现代电子技术(2009年13期)2009-08-31
