机器人全腔内Studer原位新膀胱术(“大家泌尿网”观看手术视频)
2021-11-06 06:58李宏召赵旭鹏
现代泌尿外科杂志 2021年10期
李宏召,程 强,艾 青,沈 诞,赵旭鹏,张 旭
(解放军总医院第三医学中心泌尿外科医学部,北京 100853)
膀胱癌是世界上第十大最常见的癌症,2018年有54.9万新发膀胱癌病例和20万因膀胱癌死亡的病例[1]。对于符合手术条件的非转移性肌层浸润性膀胱癌患者,根治性膀胱切除术(radical cystectomy,RC)和适当的尿流改道术(urinary diversion,UD)仍然是治疗的金标准。FDA在2000年批准了达芬奇手术系统的临床应用,随着机器人手术的普及,泌尿外科医生认识到机器人手术系统在复杂盆腔手术中应用的优势,使得机器人辅助根治性膀胱切除术(robot-assisted radical cystectomy,RARC)已经逐渐被作为一种治疗选择,该术式不仅可以减少术中出血量和并发症发生率,而且有与开放手术同等的肿瘤随访结果[2-4]。UD是决定RC后的手术疗效及患者生活质量的关键步骤,主要分为非可控性与可控性尿流改道。前者主要包括输尿管皮肤造瘘、回肠膀胱术等手术方式,而后者包括原位可控膀胱与异位可控膀胱[5]。近年来,由于全腔内的UD可以减轻术后疼痛、减少肠道的暴露和其相关并发症,逐渐得到认可和推广[6]。
1 机器人全腔内UD的现状
由于全腔内UD手术步骤相对复杂,并且对于术者技术要求较高,因而最初只局限地被用于大型综合医疗机构。但随着技术的普及,以及对该技术能更快地恢复肠道功能、缩短住院时间和更早地恢复日常生活等优势的认识[7],机器人膀胱切除术后的腔内尿流改道术也越来越受到欢迎。早期研究报道其在美国只有3%的应用率,而在过去10年里,国际膀胱联盟机构的使用率已经达到95%,其中原位新膀胱术从7%上升到17%,2018年达到23%[8-9]。理想的新膀胱通常应具有足够的容量和较低的压力以保护肾脏功能,并且高顺应性和排空膀胱无显著残留尿也是必要的[10],Studer原位新膀胱术正因为具有以上优点,成为目前应用较多的新膀胱种类。因此,我们撰写本文对机器人全腔内Studer原位新膀胱术进行相关的介绍。
2 机器人全腔内Studer原位新膀胱术
2.1 手术适应证及患者选择机器人辅助根治性膀胱切除术的适应证主要有:高级别或肌层浸润性膀胱癌、反复复发的非肌层浸润性膀胱癌、卡介苗治疗无效的原位癌、膀胱肿瘤电切和膀胱灌注治疗无法控制的广泛乳头状病变及膀胱非尿路上皮癌等。在满足机器人根治性膀胱切除术适应证的同时,全腔内Studer原位新膀胱术还需具备以下条件:①患者膀胱颈、三角区无肿瘤侵犯,无前尿道狭窄;②尿道括约肌及盆底功能正常;③膀胱肿瘤分期预估在T2期以内,并通过术中冰冻活检辅助确认无尿道残端浸润;④肾脏功能良好;⑤无明确的肠道疾病史和切除史;⑥患者无精神障碍或手部灵敏活动受损而导致生活不能自理。国内外指南均推荐对于有强烈保留神经愿望的膀胱全切患者进行性神经的保留,能够使大部分患者获益,不仅可以保留性功能而且有助于术后控尿能力的恢复[11]。而对于原位膀胱术,由于患者相对年轻,肿瘤相对早期,保留神经术式的应用指征可能更加广泛。
2.2 术前准备术前检查主要是为了评估患者是否适合手术,以及判断肿瘤的临床分期。除了常规的临床检验和检查外,腹部平片(kidney-ureter-bladder,KUB)及超声通常作为初步评估,静脉肾盂造影可用于排除上尿路肿瘤,计算机断层摄影(computed tomography,CT)和磁共振成像(magnetic resonance imaging,MRI)可评估肿瘤的局部浸润和是否远处转移,骨扫描可评估是否有骨转移,正电子发射断层扫描-计算机断层扫描(positron emission tomography-computed tomography,PET-CT)可评估转移病变,特别是淋巴结的转移情况,经尿道膀胱肿瘤切除术是诊断膀胱癌最可靠的方法。
术前准备可参考快速康复理念,并根据患者情况做出科学的取舍[12]。经典的准备从术前2~3 d开始进行肠道准备,从半流食、流食过渡到清流食,配合口服肠道抗生素和给予静脉营养。术前晚上和手术当天早晨给予清洁灌肠。常规备血,并留置胃管。术前2 h预防性给予抗生素。
2.3 设备器械除了常规机器人手术所需的操作平台和器械手臂,额外准备2把Cardiere钳,大、中、小号Hem-O-lok夹与对应的钳子,3个8 mm机器人Trocar,3个12 mm Trocar,1个5 mm Trocar,4-0可吸收倒刺缝线若干,5-0 Vicryl可吸收线若干。
2.4 麻醉,体位与Trocar布局采用气管内插管、全身复合麻醉。常规消毒、铺单。插入F14尿管,用10~20 mL生理盐水充盈气囊。按头低脚高半截石位用Allen脚蹬固定患者下肢(图1A),以利于机器人设备进入会阴区,新一代机器人对患者腿的位置要求不高[13]。完成膀胱切除和淋巴结清扫之后,先撤离机器,使患者恢复成平卧分腿位(图1B),使回肠尽量下降,方便处理肠道,减少后续新膀胱和尿道吻合的张力,并重新装机。膀胱切除和淋巴清扫术套管分布位置为脐正中上方两横指12 mm套管作为机器人镜头臂通道。两个8 mm套管分别放置于平脐水平线两侧距脐8~10 cm位置,其中左侧为机器人2号操作臂通道,右侧为机器人1号操作臂通道。第3个8 mm操作臂通道放在右侧操作臂通道外侧8~10 cm处为机器人3号操作臂通道。于左侧2号操作臂外上方8 cm处,肚脐水平上一指放置12 mm套管作为助手通道(图1C)。腔内新膀胱术在之前套管分布的基础上,于反麦氏点置入12 mm套管,作为切割闭合器通道,正中线耻骨联合上2 cm置入5 mm套管用于留置单J管(图1D)。完成套管布局后,沿镜头孔与膀胱体表投影点连线方向将机器人操作台自患者会阴侧推至手术床旁并定泊[14-15]。1号臂放置单极电剪,2号臂放置双极Maryland钳,3号臂放置Cardiere钳,助手位于患者左侧。

A、B:体位;C、D:Trocar布局;L1:肚水平线;L2:腹部正中线;L3:耻骨水平线;A1:单极电剪;A2:双极Maryland钳;A3:Cardiere钳;As1,As2:12 mm辅助套管;As3:5 mm辅助套管。图1 患者体位与Trocar布局示意图
2.5 手术步骤在完成膀胱切除及淋巴结清扫之后,进行新膀胱的缝制。对于此步骤,可分为3个阶段进行介绍。
2.5.1缝制新膀胱前 ①充分游离左侧输尿管,并将其从骶前筋膜移至右侧,与右侧输尿管放在一起备用(图2A);②将回肠平铺,在距离回盲肠近端30 cm位置量取目标回肠50 cm,可通过4-0倒刺线缝合尿道后壁组织与Denonvilliers筋膜来减小回肠最低点与尿道吻合的张力。如张力仍然过大,可松解肠系膜进一步减小回肠尿道吻合的张力。选取距回盲部约40 cm的回肠最低点作为新膀胱颈口;③锚定新膀胱颈口,用4-0倒刺线进一步加固新膀胱颈口后部与尿道后壁(图2B)。打开回肠新膀胱颈口,并在尿管的辅助下用4-0倒刺线单针法完成尿道与新膀胱颈口的吻合(图2C)。
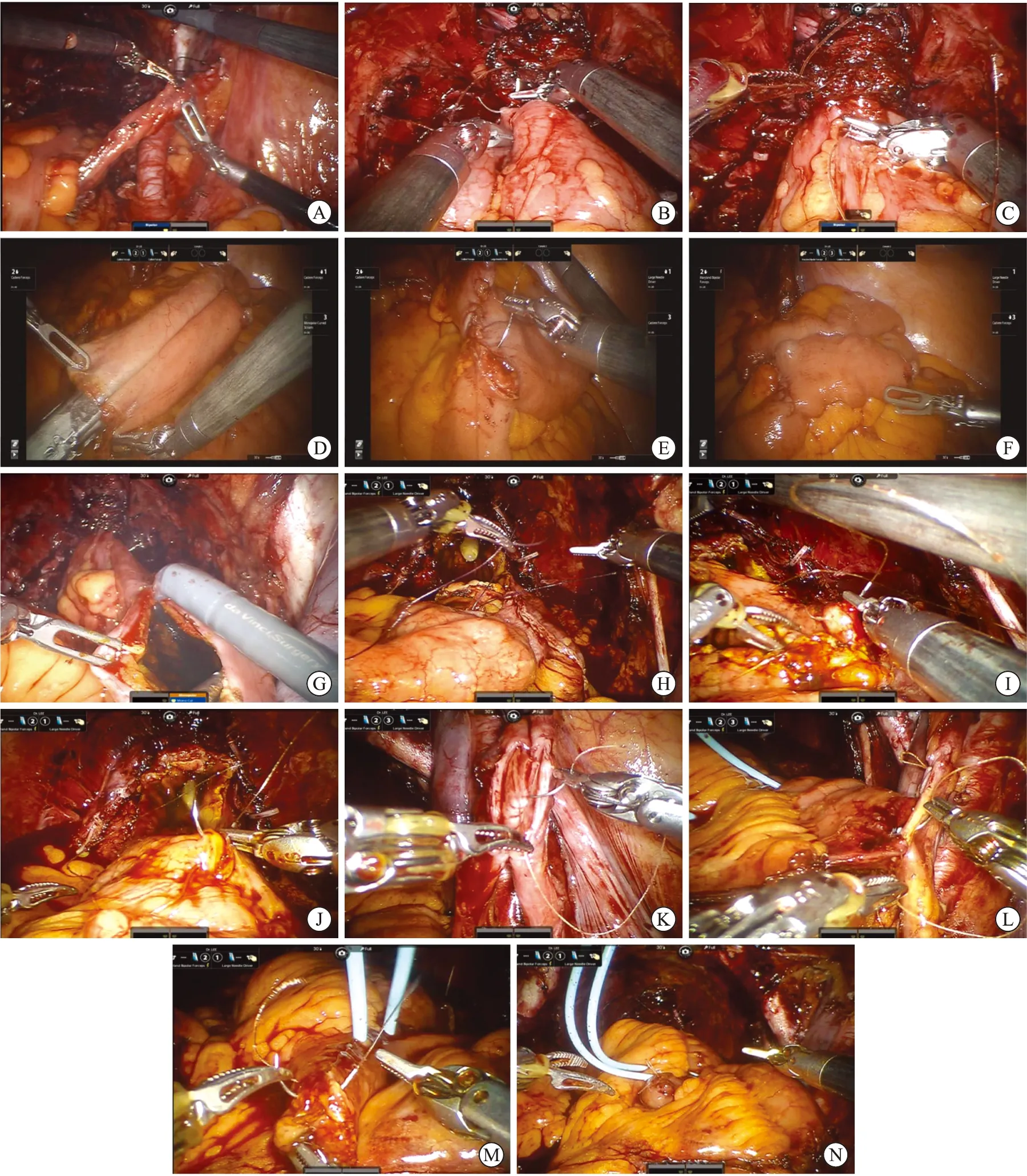
A:游离左侧输尿管,并将其从骶前筋膜移至右侧;B:加固新膀胱颈口后部尿道后壁;C:新膀胱颈口与尿道吻合;D:Overlap法恢复肠道连续性;E:关闭肠道缺口;F:恢复肠道连续性完成图;G:沿对系膜缘将肠管去管化;H:在新膀胱后壁对称位置缝合标记线;I:缝合新膀胱后壁;J:缝合新膀胱前壁;K:Wallace法吻合输尿管;L:吻合输尿管与输入道近心端;M:关闭新膀胱前壁缺口并固定单J管;N:新膀胱测漏。图2 机器人全腔内Studer原位新膀胱手术的重要步骤
2.5.2缝制新膀胱 ①选取构建新膀胱所需回肠约50 cm,新膀胱颈口近端为40 cm,远端为10 cm,并用切割闭合器截取所需肠管,切割闭合器的置入位置可灵活运用两个辅助套管通道,方便最佳角度确切处理肠道;②切除回肠末端的吻合器线显露肠腔,置入吻合器,并在肠管对系膜缘侧进行吻合,之后用切割闭合器进一步恢复肠管连续性。除此之外,Overlap方法可使肠道连续性的恢复更符合生理结构[16](图2D~F);③保留近心输入段10 cm肠管的完整性,将其余肠管沿对系膜缘去管化,在后壁肠管对称的位置定位缝合标记线(图2G~H),之后用4-0倒刺线,浆肌层内翻缝合的方法U型缝合新膀胱后壁。将前壁聚拢成近似球形,前壁近心端暂不缝合,同法在对称的位置定位缝合标记线,并缝合前壁(图2I~J)。
2.5.3缝制新膀胱后 ①用机器人3臂牵引双侧输尿管残端使其成对称位置,纵行对称劈开输尿管1.5 cm左右,用Wallace法5-0 Vicryl可吸收线合并输尿管后壁。打开输入道近端,从As3辅助套管通道通过前壁近心端留置缺口处置入双侧单J管,将合并后的输尿管与输入道的近心端进行吻合。再植完成后关闭前壁的缺口并固定双侧的单J管(图2K~M);②留置新尿管,注无菌水50~100 mL,检测新膀胱是否有漏口。留置引流管,由腹部正中切口取出标本(图2N)。术后1年复查新膀胱造影,可见膀胱容量尚可,输尿管无返流(图3)。
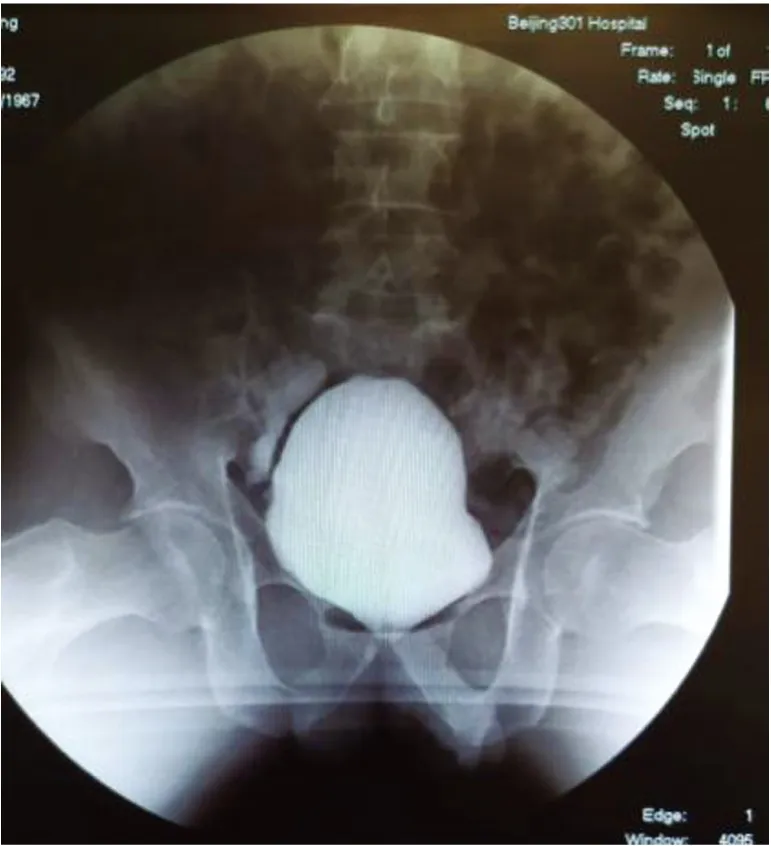
图3 机器人全腔内Studer原位新膀胱术后造影图
3 技术要点与经验
通过回顾前期的病例,我们总结一些技术要点和经验:①如果患者身材较小,可以适当将所有套管位置向头侧移动1~2 cm;②加固尿道后壁组织与Denonvillier筋膜,不仅可以减小尿道与新膀胱颈口吻合的张力,还可以加固尿道周围支撑结构,有助于改善术后尿控能力;③优先吻合尿道与新膀胱颈口不仅可以在良好的视野下确切吻合尿道与新膀胱颈口,还可以有效、充分地利用尿道长度,并且多了下端的固定点,可减少肠道在腔内的滑动,便于处理肠道。同时可以更有效地根据盆腔形状,调整新膀胱的形态;④切割闭合器在截取肠道时,选择合适钉高和钉长,使钉仓与肠道长轴垂直,确保肠道末端均有充分系膜附着,保证肠道的血液供应,如果有肠道末端疑似缺血,蠕动不佳,可适当的裁剪,从而避免发生肠道缺血坏死引起肠瘘。并且可以视情况使用多个钉仓确保肠道有足够的通畅性;⑤缝制新膀胱时,浆肌层缝合可使膀胱壁呈内翻形态,可有效避免发生尿漏,定位缝合的标记线,不仅可以使膀胱形态更佳,而且适当的牵引,也使缝合更加便捷,缩短手术时间;⑥输尿管足够短,使用精确、无张力、黏膜对黏膜吻合的no-touch技术,可保证输尿管的活力;⑦术后充分引流,减少积液感染。可根据新膀胱黏液分泌情况,及时适时的冲洗膀胱,防止堵塞;⑧女性患者可尽量保留一些生殖器官和尿道周围结构,有助于术后排尿功能的恢复。如果可通过阴道取出标本,基本接近于无创,疼痛减轻,切口相关并发症减少;⑨由于腔内改道使肠道的暴露时间减少,功能恢复快,为需要辅助化疗的患者赢取更多宝贵的治疗时间。
行该术式的术者所面临的主要问题是:①手术技术难度大,步骤相对繁琐,早期手术时间较长,需要术者有丰富的机器人手术经验;②学习曲线较长,特别是学习早期术中手术并发症发生率相对较高;③手术费用增加;④术后需要与患者建立良好的沟通,做好康复指导和随访。
4 总 结
综上所述,选择适宜的患者行机器人全腔内Studer原位新膀胱术切口小、疼痛轻、并发症减少,患者术后康复快,可以改善患者行尿流改道术后的生活质量。该术式在手术技术及安全性方面可行,并且适应了微创时代的大潮流,值得推广和使用。
猜你喜欢
临床小儿外科杂志(2022年1期)2022-11-24
承德医学院学报(2022年2期)2022-05-23
中国典型病例大全(2022年11期)2022-05-13
中国典型病例大全(2022年9期)2022-04-19
煤气与热力(2022年2期)2022-03-09
建材发展导向(2021年7期)2021-07-16
健康大视野(2020年9期)2020-05-19
石油研究(2019年12期)2019-09-10
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03